模糊控制在静电除尘高频高压电源中的应用研究
2014-09-26曾庆军
杨 炜, 曾庆军, 陈 峰
(1.江苏科技大学 电信学院,江苏 镇江 212003;2.镇江天力变压器有限公司 江苏 句容 212400)
随着工业的不断发展,大气污染越来越得到人们的重视,尤其是近年来PM2.5的提出,对工业除尘技术提出了更高要求[1]。其中,高频高压静电除尘器在工业除尘中起到了不可替代的作用。高频高压静电除尘器的工作原理是使产生的烟气带正电荷,然后烟气进入设置多层阴极板的电除尘器通道[2-3]。由于静电作用从而达到除尘目的。目前,国内高压静电除尘设备控制方式主要为基于PID控制的电压控制方式。但在实际使用中发现由于除尘器控制系统为滞后系统,工作时环境复杂,系统受非线性因素影响大,无法得到精准的数学模型。使得传统的PID控制器面临控制参数难以选定,不能在线对系统采取跟踪调节等缺点[4]。模糊控制作为智能控制的一种,其基本思想为将人工专家经验通过模糊控制器转化为控制规则,有效解决系统非线性,难以确定精确数学模型等控制问题[5]。
文中采用模糊控制的方法,实现对输出电压的调节,应用MATLAB构建系统模型,通过仿真实验实现对系统的模糊控制,通过与PID控制的对比,表明模糊控制兼顾了除尘效率和节约能耗的优点,达到了改善电源系统的控制特性的目的。
1 除尘用高频高压电源控制系统结构框图
如图1所示,三相380 V市电经三相滤波器后通过整流得到530 V直流电压,再经过逆变电路后得到20 kHZ高频交流电,最后由高频变压器升压并高压硅堆整流后输出高频高压直流电压,送至除尘器本体。在控制周期内,采集得到电源的输出电压,通过控制单元与给定电压的比较,调节PWM波的频率和占空比来控制IGBT的开通与关断,从而实现对输出谐振电压电流的大小的控制。
2 系统控制器的设计
2.1 PID控制器的设计
传统PID控制根据给定电压值与输出电压值的误差,采用增量式PID控制方式,控制单元计算出新的PWM波的频率驱动IGBT,从而得到调节后的输出电压。控制系统如图2所示[6]。
由于无法得到系统的数学模型,PID参数采取多次试凑的方式取得,首先令PID中的积分,微分系数为零,使比例参数由大到小变化,寻找系统阶跃响应快,超调较小的值。确定比例参数后,积分参数从大到小变化消除系统静差,在调节积分参数的同时适当调整比例参数以使加入积分环节后系统动态响应不变差。最终得到PID参数为:比例参数KP=1.5;积分参数KI=0.03;微分参数KD=0。
由simulink构建高频电源控制系统后,经PID调节后与开环时比较如图3,图4所示。
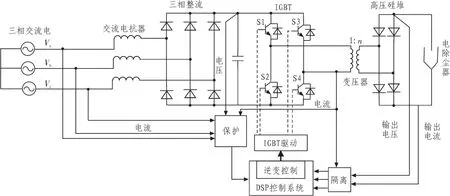
图1 电源控制系统结构框图Fig.1 Control system structure diagram of ESP
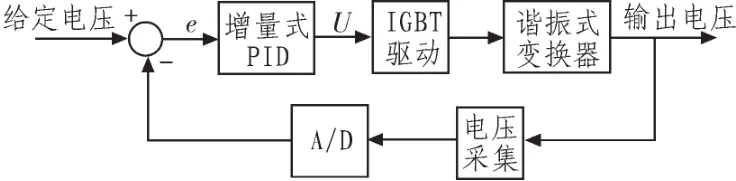
图2 PID控制系统框图Fig.2 Control system structure diagram with PID
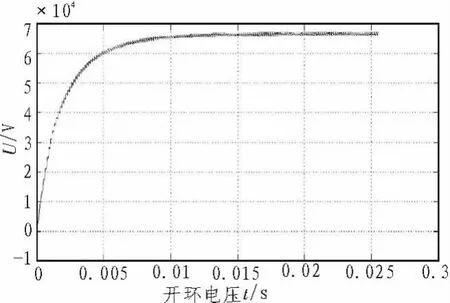
图3 开环输出电压曲线Fig.3 Open-loop output curve
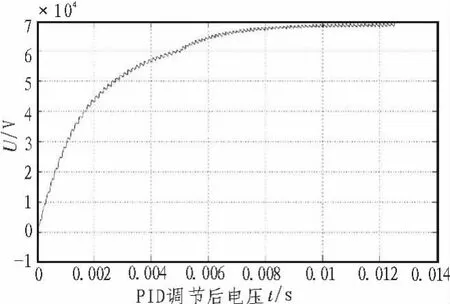
图4 PID控制输出电压曲线Fig.4 PID controller output curve
由图可知,经PID调节后,系统响应时间更快,最终输出电压大小增大,达到节约能耗,增加电源输出功率的目的。但是由于系统的多变性和非线性,使得一旦电源系统负载发生变化,PID控制器就会有很大的滞后性,所以常规PID控制器无法满足实际系统的需求。
2.2 模糊控制器的设计
基于上述PID控制器的缺点,采用模糊逻辑的控制方法,实现在线自动调节系统的输出电压,达到控制效果。为简化程序结构,提高控制效率,文中采用二位模糊控制器,输入变量为电压偏差e及电压偏差变化率ec,模糊控制器控制结构如图5所示[7]。
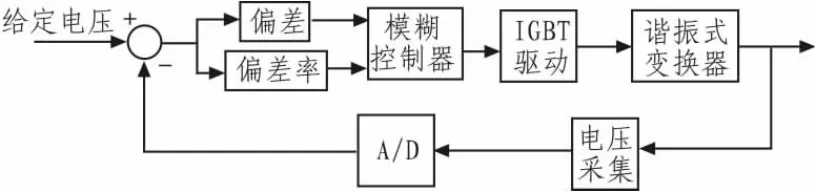
图5 模糊控制系统框图Fig.5 Control system structure diagram with fuzzy
根据实际电场实验数据,除尘电源最终输出电压物理论域 Uj=[0,70 000](V),电压变化为[-250,250](V/t)由此,设计模糊控制器输入变量电压偏差e的模糊论域为[-1,1],量化因子ke=2/70 000,输入变量电压偏差变化率ec的模糊论域为[-0.1,0.1],量化因子Kec=0.2/500。输出变量u的物理论域为[-0.5,0.5],模糊论域均为[-1,1],比例因子 Ku=0.7。
其中,输入变量e模糊论域里覆盖变量的模糊子集为:negative(偏高);zero(正好);pocitive(偏低),输入变量 ec 模糊论域里覆盖变量的模糊子集为:negative(偏高);zero(正好);pocitive(偏低),输出变量u模糊论域里覆盖变量的模糊子集为:close-fast (快降);close-slow (慢降);no-change (不变);open-slow(慢升);open-fast(快升)。
依据现场实际数据及专家经验,选取各模糊子集如表1所示。
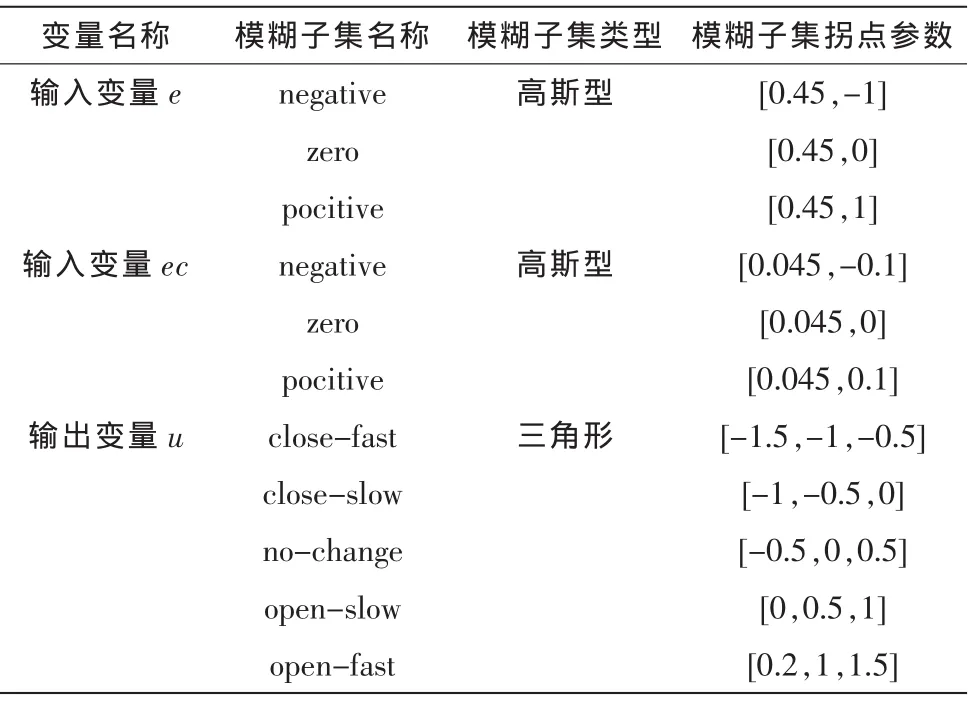
表1 输入变量,输出变量的模糊子集设定值Tab.1 Set value of fuzzy subset for input and output variable
根据现场实验数据及人工操作经验,总结出调节输出电压的规则为:
1)如果电压偏低,则快速升压;
2)如果电压正好,则电压调节量为零;
3)如果电压偏高,则快速降压;
4)如果电压正好而电压偏差较小,则缓慢升压;
5)如果电压正好而电压偏差较大,则缓慢降压。
最后在simulink仿真中加入模糊控制器模块,如图6所示。
3 仿真结果及分析
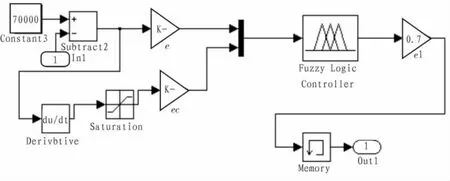
图6 电压模糊控制模块Fig.6 Fuzzy controller of output voltage
仿真时初始PWM波频率为3.5 kHz,占空比为0.35,输出电压比较值为70 000 V,构建除尘电源模糊控制系统如图7所示。
仿真结果与PID调节结果对比如图8,图9所示。
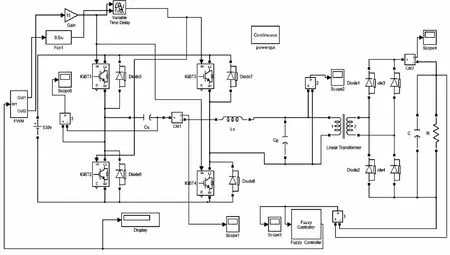
图7 模糊控制simulink仿真图Fig.7 Control system structure diagram in simulink with fuzzy
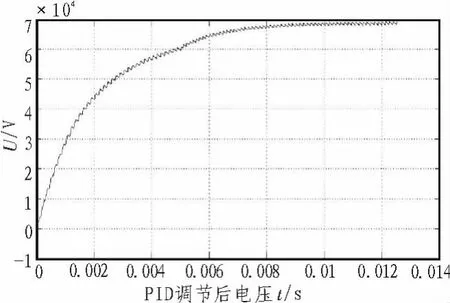
图8 PID输出电压曲线Fig.8 PID controller output curve
由图知,相比PID调节,模糊控制器很好地实现了电压的三折线升压过程,由快速上升到缓慢上升最终达电压预设值,有效克服了PID控制无法适应系统多变性和非线性的缺点。
4 结 论
由上述仿真曲线可以表明,模糊控制器通过实际电场数据和专家经验而得到相应的模糊规则,可以很好的改善PID控制器参数难以确定,不能适应系统多变性及非线性等缺点。使得电源系统电压输出曲线无超调,响应时间比开环状态提高一倍,有效地改善了除尘电源的控制性能并且显著节约能耗,取得了良好的效果。
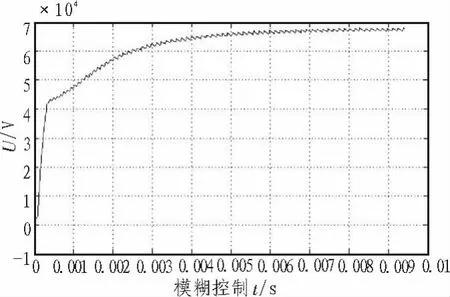
图9 模糊控制输出电压曲线Fig.9 Fuzzy controller output curve
[1]王延安,肖登明,李佑淮,等.大功率高频高压变压器的试验及故障分析[J].高电压技术,2009,35(5):1049-1053.
WANG Yan-an,XIAO Deng-ming,LI You-huai,et al.Test and fault analysis for high power high frequency high voltage transformer[J].High Voltage Engineering,2009,35(5):1049-1053.
[2]刘军,官威,石健将,等.高压静电除尘用电源调压特性的分析[J].高电压技术,2009,35(2):344-349.
LIU Jun,GUAN Wei,SHI Jian-jiang,ZHANG Zhong-chao,et al.Voltage regulation characteristicsanalysisofpower supply for high voltage electrostatic precipitators[J].High Voltage Engineering,2009,35(2):344-349.
[3]盛立丞.静电除尘器高频电源控制系统研制[D].浙江:浙江大学,2010.
[4]Neimarlija N,Demirdzic I,Muzaferija S,et al.Finite volume method for calculation of electrostatic fields in electrostatic precipitators[J].Journal of Electrostatics,2009,67(1):37-47.
[5]Berdyshev V F,ShatokhinK S,Moshkina E A,et al.Systems Evaluation of the Factors that Affect the Efficiency of an Electrostatic Ppecipitator used to Clean Waste Gases[J].Metallurgist,2011,55(1/2):77-84.
[6]雷春雨,王直.一种简化PID模糊控制器的研究与设计[J].电子设计工程,2013,21(2):47-49,52.
LEIChun-yu,WANG Zhi.Research anddesign ofa simplifiedPIDfuzzycontroller[J].ElectronicDesignEngineering,2013,21(2):47-49,52.
[7]乔志杰,王维庆.模糊自适应控制器的设计及其仿真[J].自动化与仪表,2008,23(1):26-29.
QIAO Zhi-jie,WANG Wei-qing.Design of self-adaptive fuzzy PID control system and its computer simulation[J].Automation&Instrumentation,2008,23(1):26-29.
