基于六轴传感器的步态分析系统设计*
2014-09-25李秀丰郭立泉王计平
李秀丰, 郭立泉, 王计平, 郁 磊, 方 强
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049;3.中国科学院 苏州生物医学工程技术研究所 医用电子室,江苏 苏州 215163;4.皇家墨尔本理工大学 电气与计算机工程学院,澳大利亚 墨尔本 3001)
0 引 言
步态分析是对人类运动功能的综合研究,包括对人类运动特征的测量、描述和数量的评估[1]。通过步态分析,可以识别出步态周期,计算出人类步态的运动学和动力学参数,还有肌电参数。因此,步态分析已经被广泛应用在运动、康复和健康诊断等领域中。例如:在一些运动训练中,可以应用步态分析来分析出运动员在训练过程中出现的一些问题,然后帮助他们提升成绩[2,3];在康复医疗中,可以应用步态分析来监护病人的病愈过程[4,5];在生物医疗工程中,步态分析已经成为一种基本的辅助方法来识别人的运动特征。近年来,虚拟现实技术也越来越多的应用到了步态分析与训练当中,Mirelman A等人的研究证明了通过虚拟现实技术进行辅助训练对病人的步态的生物力学功能的恢复有着很好的效果[6]。
本文设计了一种基于六轴数据的步态分析系统,并在嘉兴市第二医院康复医学中心进行了临床实验,实验结果表明:本文所设计的步态分析系统稳定可靠,可以方便快捷地对病人的步态进行分析,为医生对病人的诊断提供可靠的参考依据。
1 系统的总体设计
本文是以中风病人为研究目标,以中风病人的运动数据作为采集对象,设计出一种可以采集病人运动数据的无线采集装置,无线接收终端可以通过Zig Bee无线网络接收无线节点传来的数据,然后通过RS—232与电脑终端进行串口通信。所以,系统的总体结构设计可以分为2个部分:一个是数据采集节点,一个是数据接收终端。主要功能是首先通过MPU6050六轴数据传感器采集三轴的加速度和角速度信息,也就是人体下肢的运动信息;其次是实现数据的Zig Bee无线传输,通过CC2530无线Zig Bee传输芯片,将采集到的运动数据传输到Zig Bee无线接收终端中;然后利用上位机软件,将采集到的数据进行处理,实现存储和实时显示功能,如图1。

图1 系统设计框图
2 硬件电路设计
2.1 主控制电路
本文采用TI的CC2530作为数据采集节点的主控核心,控制传感器模块的数据采集和数据的无线传输,CC2530是一种真正的IEEE 802.15.4的片上系统解决方案,用于Zig Bee和RF4CE的应用,它可以以非常低的材料消耗建立一个非常稳定的网络节点系统。CC2530具有性能优良的RF收发器,整合了增强型8051 MCU,系统可编程闪存,8 kB的RAM,主控电路如图2。

图2 主控电路电路图
2.2 电源模块
电源模块采用了300 mA的锂电池对系统进行供电,供电电压为3.7~4.2 V,而CC2530的工作电压为1.8~3.8 V,MPU6050的工作电压为3.3 V。所以,选取了TPS71733降压和稳压芯片,为MPU6050提供稳定的3.3V工作电压,如图3。
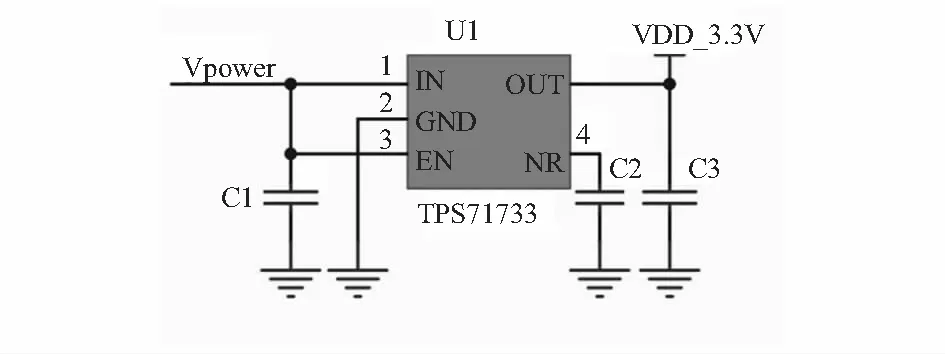
图3 电源模块电路图
2.3 传感器模块
传感器模块选用了MPU6050作为六轴数据传感器,该传感器为全球首例整合性六轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了大量的包装空间。MPU6050整合了三轴陀螺仪、三轴加速器,并含可藉由第二个I2C端口连接其他厂牌的加速器、磁力传感器,或其他传感器的数字运动处理器(digital motion processor,DMP)硬件加速引擎,由主要I2C端口以单一数据流的形式,向应用端输出完整的九轴融合演算技术,如图4。

图4 传感器模块电路图
2.4 开关模块
开关模块的作用是控制整个节点系统的上电和掉电,实现的功能是短按开关S1时,系统上电,长按开关5s以上,系统掉电。实现方法是通过硬件电路和下位机程序配合共同完成。当短按开关S1时,整个开关电路导通;当要关闭系统时,长按开关,这时,CC2530主控芯片会检测与CC2530相连接的端口P11,如果检测到低电平,则认为开关已被按下,此时CC2530会给P10发送一个低电平,使Q3不再导通,所以,系统断电,如图5。

图5 开关模块电路图
3 系统的软件设计
本文的系统软件设计师在LabVIEW软件平台上实现。系统的软件设计按照所实现的功能主要包含两方面内容,第一部分是人机操控界面和一些常用的数据处理功能,包括数据接收板与PC的串口通信、采集数据的预处理、数据的波形显示、存储等功能 ;第二部分就是步态分析算法部分,主要包括步态识别算法和步态参数的计算。
4 系统测试
4.1 实验室测试
在实验室旁边的走廊标记34 m的距离作为步态分析系统的测试范围。分别将2个下肢运动数据采集模块戴在大腿根部、小腿(膝盖下约5 cm)处,行走34 m距离,然后记录下步数,测试结果如图6。

图6 步长对比曲线
上图实验结果的最大相对误差为6 %,相似实验重复做8组,得出8组测试的最大误差如表1所示。

表1 步长误差值
4.2 临床测试
本次的临床测试选择了来自嘉兴市第二医院康复医学中心的患者来配合进行实验,最后选择了5例偏瘫患者进行测试实验。
在医生的指导下,完成了5例病人数据的实时采集。实验过程中,本步态分析系统很好地完成了运动数据的采集与存储,步态识别算法和步态参数的计算很好地完成了对步态的分析,对康复医生分析病人病情起到了很好的辅助作用。
5 结束语
本文基于六轴数据传感器,设计了一种步态分析系统。系统的设计以微型和低功耗为出发点,设计过程中充分考虑了便携式步态分析系统对系统尺寸和功耗的要求,使该采集节点系统在使用普通300 mA锂电池的情况下,可以使用长达半个月之久。系统的软件设计基于LabVIEW平台,集成了接收板与PC机的串口通信、数据的存储与显示、人机交互界面、步态参数的计算等多种功能。
参考文献:
[1] Ghoussayni S,Stevens C,Durham S,et al.Assessment and validation of a simple automated method for the detection of gait events and intervals[J].Gait & Posture,2004,20(3):266-272.
[2] Boulgouris N V,Hatzinakos D,Plataniotis K N.Gait recognition:A challenging signal processing technology for biometric identification[J].Signal Processing Magazine,IEEE,2005,22(6):78-90.
[3] Kwon D Y,Gross M.Combining body sensors and visual sensors for motion training[C]∥Proceedings of the 2005 ACM SIGCHI International Conference on Advances in Computer Entertainment Technology,ACM,2005.
[4] Kimmeskamp S,HennigG E M.Heel to toe motion characteristics in Parkinson patients during free walking[J].Clinical Biomechanics,2001,16(9):806-812.
[5] Steultjens M,Dekker J,Vanbaar M,et al.Range of joint motion and disability in patients with osteoarthritis of the knee or hip[J].Rheumatology,2000,39(9):955-961.
[6] Mirelman A,Patritti B L,Bonato P,et al.Effects of virtual reality training on gait biomechanics of individuals post-stroke[J].Gait & Posture,2010,31(4):433-437.