用于生态环境微传感节点的光电能量转换系统设计
2014-09-25时维铎邢玉秀
徐 磊, 时维铎, 王 军, 邢玉秀, 李 阳
(南京林业大学,江苏 南京 210037)
0 引 言
目前,对于森林生态环境的研究主要通过放置无线传感节点向监测中心不断发送数据,监测森林生态系统的各项指标。大多采用干电池对传感节点的供电,但是干电池使用寿命短,需要经常更换,对于已经投入到森林里的传感节点来说,这些后期的维护是耗时耗力的。另外,干电池里的化学物质不容易降解,也会对环境造成很大的污染。
本文设计主要是采用光电能量转换系统,将太阳能转换为电能,供传感节点使用。采用光伏电池最大功率跟踪技术,实现光伏电池的最大功率输出,进一步提高了太阳能的利用率,并设计了电源管理模块,合理地分配电能,提高蓄电池的使用效率,保证传感节点夜间无间断工作。这种设计实现了对太阳能的利用率的提高,完成了传感节点的无间断工作,具有较高的理论意义和应用价值[1~3]。
1 系统硬件设计
1.1 总体方案设计
本文设计以MSP430作为控制器,MSP430是一种超低功耗的单片机,采用+3.3 V供电,特别适合应用与电池供电的长时间工作场合[4~6]。利用单片机的串口实现与GPS模块的通信,测得当地的经度、纬度,并通过LCD1602进行显示,其总原理框图如图1所示。

图1 总体原理框图
1.2 光照传感器模块设计
BH1710FVC 具有优良光谱灵敏度,功耗低等特性,适用于这种电池供电的系统。BH1710FVC为16位串行数字输出型环境光传感器,采用I2C总线接口,可以便捷地与单片机系统进行通信。器件本身有3种精度模式:高精度、中精度和低精度。其中,高精度分辨率为1 lx,测量时间为120 ms; 中精度分辨率为4 lx,测量时间为16 ms; 低分辨率为32 lx,测量时间为2.9 ms,通过MSP430向BH1710FVC 发送不同控制指令,即可实现模式选择。本文设计采用上、下、左、右4只光照强度传感器,分别测得4个方向上的光照强度,并通过虚拟的串口,将测得的数据传给单片机,进而控制相应的继电器动作,控制云台运动。另外,由于BH1710FVC的最大量程为65536 lx,为了满足夏季强太阳光照的要求,本设计特别采用遮光板以减少太阳光的透射率,增大量程。
1.3 锂电池充电模块
仅让光伏电池板到达最佳位置还不够,光伏电池的输出电压和电流会随着光照的不同而变化,本设计采用最大功率点跟踪法保证每个光照时刻光伏电池组件输出的功率都为最大值。有光照时,由光伏电池板对锂电池充电,同时提供节点工作电流;无光照情况下由锂电池单独提供节点工作电流。本设计采用CN3722进行稳压控制,对锂电池进行充电[7]。
1.4 云台控制设计
1.4.1 驱动电机选型
步进电机控制精确,但是力矩比较小,不能满足本次设计的需求;直流电机力矩大,调速方式简单,但是投入使用后,在以后的维护方面比较麻烦;因此,本文设计选用220 V交流电机作为驱动设备,带动云台转动,寻找最佳功率点。
1.4.2 双轴跟踪模块设计
双轴跟踪模块采取基于光照度传感器的控制方法为主,GPS地理位置信息为辅。GPS模块可以对当地的经度、纬度、高度、UTC时间等信息进行测量,本设计主要使用到纬度、经度和时间信息,以便对云台的校对进行辅助控制,GPS模块与MSP430连接简单,通信方便,只用将GPS模块的RX,TX分别接单片机的TX,RX管脚,设置好波特率之后,即可进行数据传送,并自带可充电后备电池,支持温启动或热启动。主控制基于4个BH1710FVC,上下一组、左右一组,分别进行对比,为了防止云台在最大功率点附近不停的调整,在程序中对每组数据设置了一定的阈值,当它们的光照强度差值达到阈值之后,单片机控制继电器动作,带动云台朝着光照强度小的方向转动,以达到最佳的收光状态,使帆板的输出功率最大[8~11]。双轴跟踪模块的模块框图如图2所示。

图2 双轴跟踪模块方框图
1.4.3 逆变电路设计
逆变电路由12 V直流输入、欠压保护电路、过热保护电路、220 V/50 kHz整流滤波、过流保护电路等组成,又包括频率产生电路(50 kHz和50 Hz PWM电路)、直流变换电路(DC/DC)将12 V直流转换成220 V直流、交流变换电路(DC/AC)将12 V直流变换为220 V交流,这些模块共同完成了将12 V的直流电转化为220 V的交流电,供伺服电机使用。
1.5 遮光材料的选择
由于BH1710FVC的寄存器为16位,最大量程为65 536 lx。在春秋季节,太阳光的强度比较弱,基本上可以满足要求,在炎炎的夏季,一般情况下光照强度为100 000 lx,甚至更高,这样就不能满足测量的需要,更不能完成对最大功率点的跟踪。为了解决量程不够的问题,本设计特别采用塑料遮光板,仅让部分的太阳光照射在BH1710FVC的受光面上[12,13]。通过对不同颜色的遮光板进行试验测量,得到不同塑料板的的透光率与最佳阈值如表1所示。
综合表1可以看出:绿色和青色遮光板的透光率太低,最佳阈值比较小,在不同的条件下,可能要不断地进行调节,会造成电机不停地转动,这样会造成电能的浪费;白色和黄色的透光率偏大,最佳阈值比较大,较大的阈值会造成控制精度的丧失,不能让太阳能帆板追踪到最大功率点。红色的遮光板无论在透光率还是最佳阈值,都比较合适,既不会造成电能的浪费,又不会丧失控制精度,所以,本文设计选用红色的遮光板。
另外,为了提高系统的灵敏度,在红色的遮光板上面,沿着4个BH1710FVC最小模块的内部布置了黑色的挡光板,根据阴影效应,当太阳光非垂直照射时,在一侧就会产生阴影,这样可以放大上下或者左右侧BH171FVC0的光强差,可以提高系统的灵敏度,同时缩短了调节时间,减少电机的工作时间,有效地节约了电能。
2 系统软件设计
系统上电以后,要对各个模块进行初始化操作,之后根据GPS模块提供的时间、纬度判断太阳是否落山,进行初步的辅助控制,接着MSP430根据4只BH1710FVC提供的数据,进行阈值判断,对云台的位置进行调节,直到太阳能帆板达到最大功率点,系统的程序流程图如图3所示。

图3 系统软件流程图
3 实验结果
1)双轴跟踪技术对光电输出功率的测试
制作的智能新型双轴光电控制物联网传感节点系统实物,如图4所示。

图4 系统实物图
太阳能电池板工作电压为17.5 V,开路电压为21.5 V,最大输出功率为17.4 W。不采用双轴跟踪控制技术时,帆板以大约45°面向南放置,光伏帆板的输出功率随着一天中光强的变化,有较大的变化,而且基本上不能达到最大功率输出。当采用了双轴跟踪技术后,光伏帆板的输出功率整体上有了较大的提高,实现了对太阳光的自动跟踪,而且从上午10点到下午15点基本上都处于最大功率输出的状态,大大地提高了太阳能的利用率,采用双轴跟踪和没有采用双轴跟踪的功率输出图如图5所示。
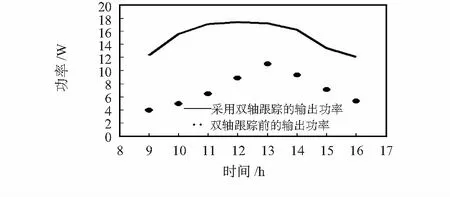
图5 最大输出功率对比图
2)一天不同时刻光照强度测量曲线
一天当中,光照强度随着时间的变化而变化,本设计应用了上、下、左、右4只BH1710FVC光照强度传感器,将采集到的数据送MSP430,并送LCD1602进行显示。2013年9月23日对全天各个时刻的光照进行了测量,分别取4只BH1710FVC的平均值得到的测量数据如图6所示。
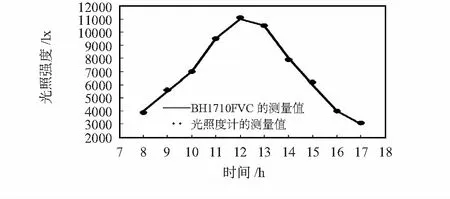
图6 一天各时刻光照强度测量值
4 结 论
本文设计主要研究用于森林环境监测传感节点的光伏转换系统,通过MSP430单片机接收光照强度传感器数据进行自动跟踪控制,同时采用光伏电池的最大功率跟踪技术,使光伏电池工作在最大功率输出状态,进一步提高太阳能量的利用率。研制的样机可以基本实现功能,实用价值较好,可推广应用到大棚种植、森林环境监测监控等其它场合。
参考文献:
[1] 郭凤仪,周 坤,姜丽丽,等.太阳能LED照明控制系统的设计与实现[J].电工电能新技,2012,31(3):86-89.
[2] 王 军,蒋小川.面向生态环境监测的微太阳能传感器节点研究[J].传感器与微系统,2012,31(10):16-19.
[3] 张文涛.基于PLC的太阳跟踪系统的设计与实现[J].制造业自动化,2010,32(3):127-130.
[4] 何利民.单片机高级教程—应用与设计[M].北京:北京航空航天大学出版社,2007:1.
[5] 谭浩强.C程序设计[M].2版.北京:清华大学出版社,1999.
[6] 赵建领,薛园园.51单片机开发与应用技术详解[M].北京:电子工业出版社,2009.
[7] 倪玉峰,闰 闹,刘建成.一种新颖的太阳能追踪采集系统设计[J].现代电子技术,2011,34(3):201-207.
[8] 王东江,刘亚军.太阳自动跟踪控制系统的设计[J].数字技术与应用,2010(7):19-25.
[9] 郭志培,孙志毅.太阳自动追踪系统研究[J].工业控制计算机,2011(12):74-76.
[10] 侯长来.太阳跟踪装置的双模式控制系统[J].可再生能源,2008,28(1):35-36.
[11] 刘庆才,沈 辉.太阳跟踪装置及其应用[J].广东电力,2011,24(11):66-69.
[12] 齐凤河,刘楚明.基于BH1710的照度计设计[J].大庆师范学院学报,2011,31(6):14-17.
[13] 苏黎明,刘爱华. 自制简易数字照度计[J].实验技术与管理,2010(3):57-60.