一种用于空投翼伞雀降时的声波高度计系统设计
2014-09-25任建新王青青牛振中
任建新, 王青青, 牛振中
(西北工业大学 自动化学院,陕西 西安 710072)
0 引 言
空投技术[1]是利用降落伞将物资投放到指定地域的一项技术,同时它也是一种非常重要的部队投送与物资补给手段,在现代战争和非战争行动中都具有广泛的应用。翼伞系统的高滑翔性和可控特性[2],使得翼伞系统已成为空投领域研究的热点。
雀降[3.4]是翼伞的一种重要性能,《降落伞理论与应用》一书中这样定义雀降:当翼伞以滑翔状态接近地面时,如果以较快的速度将两操纵绳同时拉下,在很短的时间内翼伞的前进速度和垂直速度将会迅速地减小到极小值(接近0),若开始操纵的高度选择适当,落地时速度正好达到最小值,此种操纵便称为雀降。
空投时,为了保证翼伞落地时刻的速度得到有效的控制,必须在预定的雀降操纵时刻实施减速操作,而现有高度测量设备[5.6]如:GPS的测高误差相对过大;气压高度计仅能在地面状况已知时给出准确的测量信息,而且气压高度计的精度难以满足翼伞实施雀降时对高度信息的精度要求;此外,超声波测距计、雷达测距计和激光测距计受地面环境影响较大,面对茂密的丛林植被可能给出错误的高度信息,且雷达和激光测距计的成本相对较大,不适合空投系统的低成本要求。为此,本文采用声波高度计[7]来提高高度测量信号的准确度。
1 声波高度计测距原理
声波高度计的测距原理与声纳和雷达类似,其基本原理[8]是利用声波在空气中的传播速度c为已知,声波发射器向反射面发射一组声波脉冲,声波遇到目标后必然有反射回波作用在接收换能器上,测量声波从发射点至目标地传输所经过的时间,即当换能器发射出声波开始计时,到声波经空气传播至目标,再反射回传播至声波接收器停止计时,测得传播时间t,由下式可以求出声波发射点距目标之间的距离
(1)
2 声波高度计系统总体方案设计
本文中设计的声波高度计系统主要包括:主控制模块、声音发送模块、声音接收模块、串口通信模块以及电源模块。系统的总体结构图如图1所示。
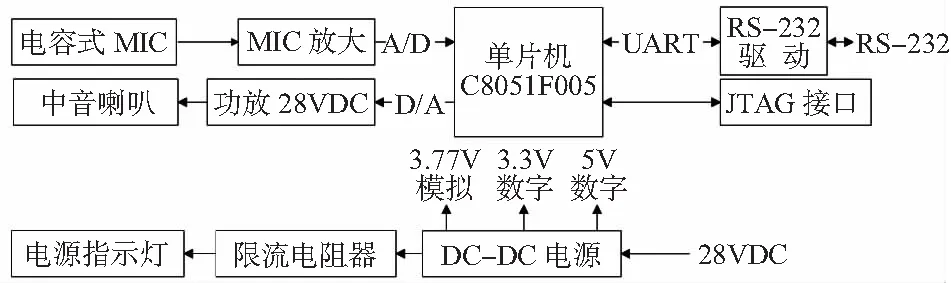
图1 声波高度计系统结构图
声波高度计系统的总体方案设计思想是在单片机的控制下,利用单片机内部的12位DA输出一组固定频率的脉冲信号并通过功放电路驱动喇叭发声,用麦克风接收声音信号并对信号进行放大,然后再经过单片机内部的A/D转换器把回波信号转换成数字信号,单片机通过RS—232与上位机进行通信,整个系统采用28V直流电源供电。
3 系统功能模块硬件电路设计
根据上述的声波高度计系统结构图可知,系统主控制器单片机主要考虑其必须满足:封装小,带有一定采样精度的A/D,D/A,UART,片内JTAG仿真以及丰富的存储空间等。综合考虑上述主要因素,本文选择了Cygnal公司的C8051F005单片机[9]作为主控芯片。
声音发送模块设计选取的是SGS公司生产的TDA2030A集成功放,该器件具有输出电流大、谐波失真小、内部设有过热保护、外围电路简单的特点。由于总体方案中用到的是28 V直流电源单电源供电,所以,这里选取TDA2030A的OTL电路。
声音接收模块采用常用的驻极体话筒接收声波信号,该模块要求对驻极体话筒受声后采集到的微弱电平信号进行放大,放大后的信号再经过单片机内部的A/D转换器转换成数字信号,以触发单片机的定时中断。本设计选用低噪声可变增益仪表放大器AD623进行前置放大。
电源模块设计时由于电源转换是28 V转换到5 V,如果采用线性稳压器的话,则消耗在线性稳压芯片上的功率较大,效率也低,进而发热较多,此外,线性稳压电源的体积大,重量重,不适合本设计的微小型化。鉴于上述的考虑,本文中28 V转5 V的电源转换芯片采用TI推出的一种DC/DC降压型开关电源转换芯片TPS5410。此外,本文选用电源转换芯片LM1117—3.3来获得+3.3 V电源电压,LM1117是一种正电压输出的低压降三端线性稳压器, 800 mA的输出电流能够满足声波高度计系统CPU正常工作时电流的需要。
本文设计的声波高度计系统的详细电路原理图如图2所示。
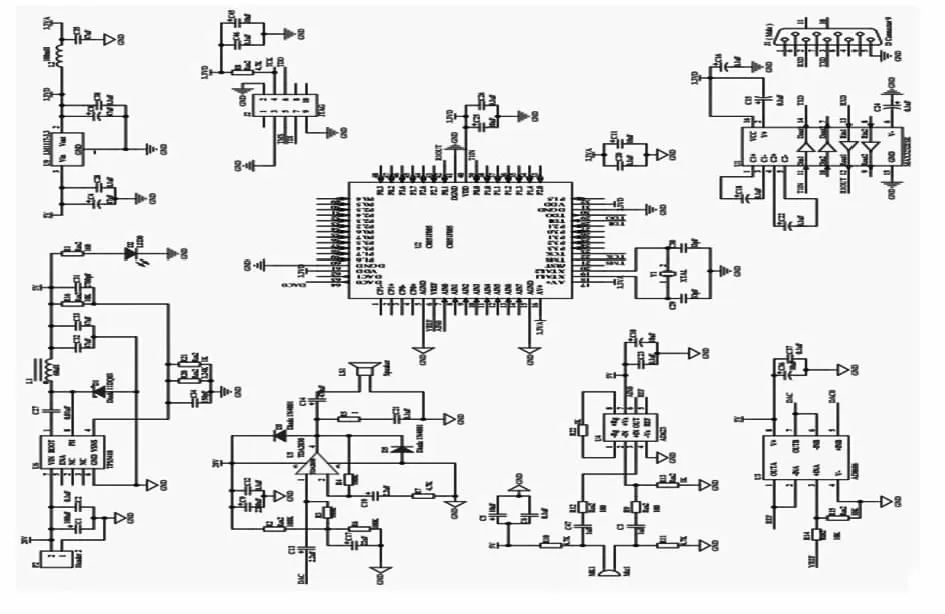
图2 声波高度计系统的详细电路原理图
4 系统软件设计
为便于升级和维护,声波高度计的软件设计采用模块化设计方法,每个模块完成特定的功能。声波高度计系统的软件程序流程图如图3。其中主程序设计基本思想是[10]:利用定时/计数器T0控制声波发射的周期,定时器T0定时周期地发射固定频率(1 kHz)的脉冲信号,然后通过C8051F005单片机内部的12位DA0输出。脉冲发送完毕后延时5 ms(延时5 ms是为了滤除掉由声波高度计喇叭横向直传过来的声音信号,以免其对回波信号的检测产生影响),然后启动单片机内部12位AD(AD启动方式为定时器T3溢出)通道0进行回波信号采集,同时把采集到的信号存到数组中,A/D转换结束后,对串口发送标志置1,然后用UART0串口通信将A/D转换结果发送至上位机。
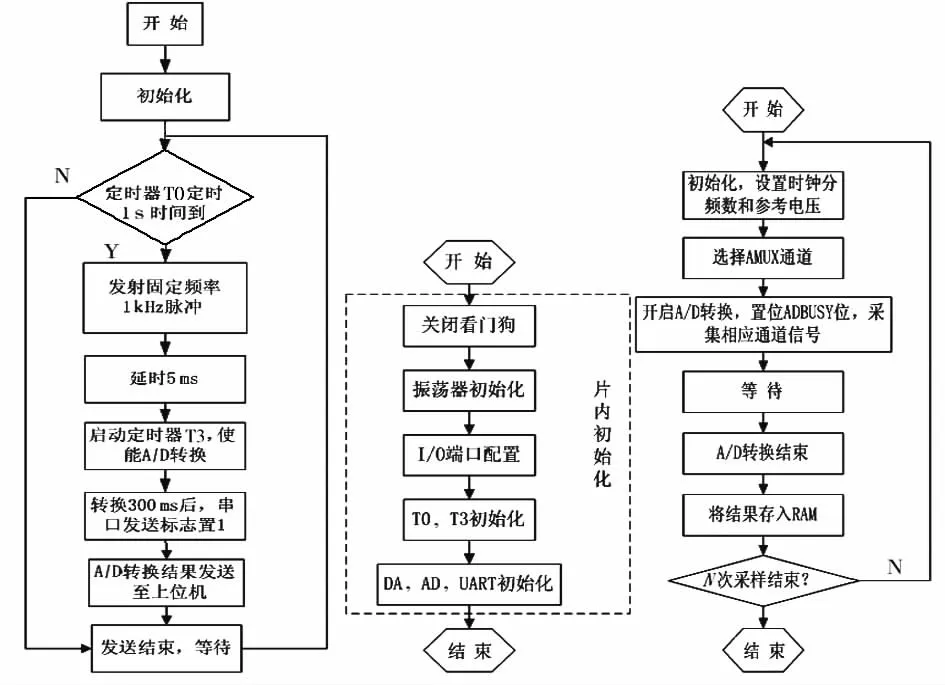
图3 声波高度计系统软件程序流程图
5 系统试验
利用上文研制的声波高度计系统分别进行了室内和室外的2种试验,每种试验中又分别做了不同反射面和不同高度情况下的试验。本文的试验结果均采用数据离线处理的方式。
试验时,声波采用的是1 kHz的正弦波脉冲信号,由C8051F005单片机控制内部的12位DA0输出,串口通信的波特率设置为9 600,声波高度计系统的AD采样频率采用的是8 kHz,每次采集300 ms数据,为了能把采集到的数据全部能发送至上位机上,试验时利用定时器T0控制单片机每3.5 s发送一次声波,每次发送5个脉冲信号。
5.1 室内试验
由于在实验室内条件有限,在室内只做了朝向天花板(距离2.4 m)的一组验证性试验,试验时接收了5次回波信号,试验结果如图4所示,且经过高通滤波滤除掉低频趋势项后的单周期局部放大回波信号波形如图5所示,试验误差统计结果如表1所示。

图4 天花板反射的回波信号波形图
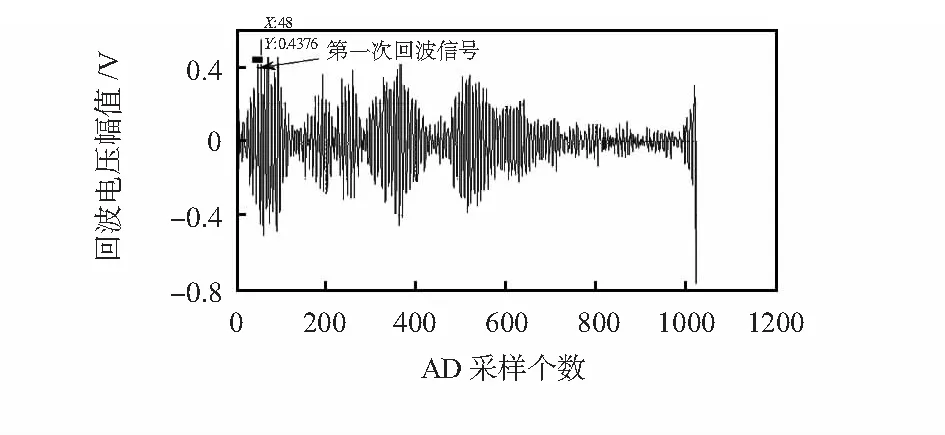
图5 经高通滤波处理后的回波信号波形
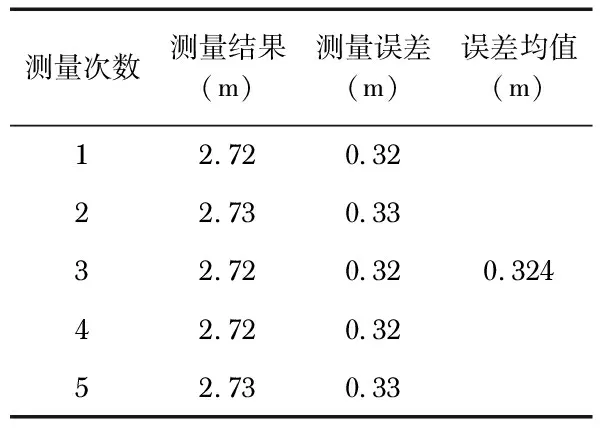
表1 室内到天花板的距离测量误差统计结果
由上述结果可知,经高通数字滤波处理后的回波信号效果要好于局部放大后的回波信号效果,且测量误差均值为0.324 m,符合声波高度计的设计要求。此外,从图5中还可看出:室内试验一个测量周期内会收到多个回波,这是由于室内不是自由声场,声音信号在室内各个反射面之间来回反射造成的,这也会造成回波信号相互干扰而影响测量精度,所以,要进行室外自由声场的试验。
5.2 室外自由声场中的试验
为了研究本文研制的声波高度计对空投时不同反射地面的适用性,分别针对灌木丛地面、草丛地面、水泥地地面和地板砖地面4种地面状况做了不同高度下的多组试验,每组试验分别接收5次回波信号。针对灌木丛地面做了4.7 m高度下的试验,试验结果如图6,高通滤波后的结果如图7,误差统计结果如表2。
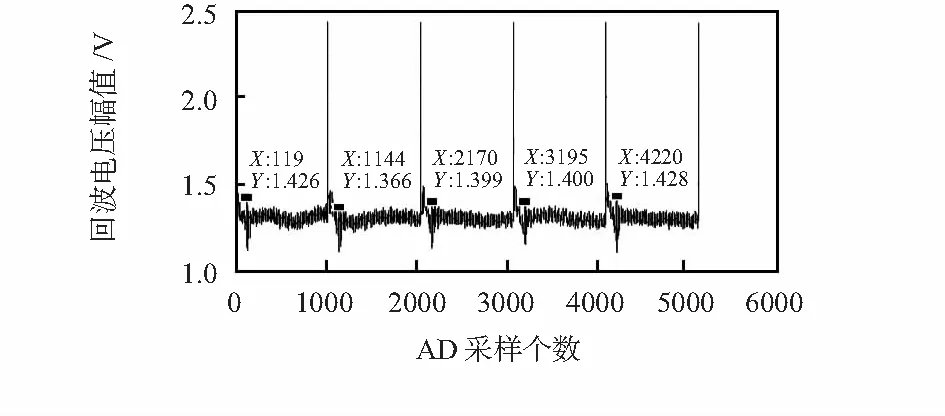
图6 高度为4.7 m时的灌木丛地面回波信号
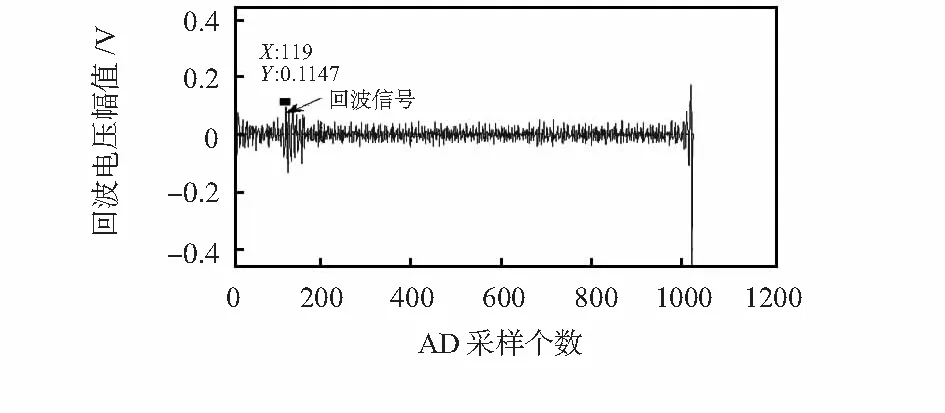
图7 高通滤波处理后的局部放大回波波形

表2 高度为4.7 m时灌木丛地面的测量结果
此外,文中还针对草丛地面分别做了2.25,3.0,4.7 m高度下的试验;针对水泥地地面分别做了3.0,12.0 m高度下的试验;针对地板砖地面分别做了2.7,5.7 m高度下的试验。试验结果如表3所示。
通过比较上述针对不同试验环境、不同反射地面、不同高度的试验结果可知:声波高度计系统在4种反射地面的不同高度情况下都能够给出高度信息,且室内试验的测量误差均值0.324 m,室外试验的最大测量误差均值为0.814 m,各组试验的量测误差均值都在1 m以内,这说明在所做的试验量测范围内,声波高度计原理样机的高度测量精度满足空投的要求。

表3 室外试验测量结果
分析上述的试验结果还可以看出:地板砖地面上的试验结果测量精度最高,水泥地地面上的测量精度次之,灌木丛地面上的测量精度最低。这是因为灌木丛地面比较粗糙,对声音信号的反射效果最差,其测量误差也是最大的,当高度为4.7 m时,其最大测量误差为0.5 m。相对而言,光滑的地板砖能够很好地反射声音信号,其最高精度可达0.04 m。
6 结束语
为了提高空投翼伞雀降时高度测量信号的准确度,本文提出了采用声波高度计进行高度测量。首先完成了声波高度计系统的软硬件设计,并利用设计的声波高度计系统在室内和室外针对不同反射面,包括室内天花板、室内墙面、室外草丛地面、室外灌木丛地面、室外水泥地面和室外地板砖地面,分别进行了不同高度的试验研究和结果分析。多组试验数据的事后处理表明:研制的声波高度计在所做的试验量测范围内,其测量精度满足空投的要求,验证了该系统可在空投时针对不同的地面状况具有一定的适用性。
参考文献:
[1] 于成果,李良春.精确空投系统分析[J].兵工自动化,2007,26(4):6-7.
[2] 陈 宇.精确空投:用GPS送“军粮”[N].中国国防报,2009—12—22(15).
[3] 王利荣.降落伞理论与应用[M].北京:宇航出版社,1997.
[4] 赵秋艳.翼伞雀降技术[J].航天返回与遥感,1999,20(2):5-9.
[5] Tavan Steve,Noetscher Greg.Advanced sensors for precision airdrop[R].AIAA2009—2951,2009.
[6] Stein J M,Madsen C M,Strahan A L.An overview of the guided parafoil system derived from X—38 experience[C]∥18th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar,Arlington,Virginia,2005:1652-1665.
[7] Ulich Bobby,Steele Kenneth.A sodar height sensor for rrda-s[R].Restom,VA:American Insitute Aeronautics and Astronautics,2003.
[8] 杜清怀,胡立新,张 栋.声波测距定位系统在浅海地震采集作业中的应用[J].石油仪器,2004,18(6):17-20.
[9] Cygnal Intergrated Products Inc.C8051F0XX Development Kit User’s Guide[Z].Silicon Laboratories,2001.
[10] Cygnal Intergrated Products Inc.C8051F单片机应用解析[M].北京:北京航空航天大学出版社,2002:411-419.