电磁传感器的循迹特性分析*
2014-09-25刘雪扬张文斌尹志宏
刘雪扬, 张文斌, 尹志宏
(昆明理工大学 机电工程学院,云南 昆明 650500)
0 引 言
磁场的检测是传感器技术中的一个重要部分,检测磁场的传感器也有很多种。微功耗磁传感器[1]采用结构简单的开口磁芯形式和间歇式脉冲激励源工作模式,以及深度负反馈控制技术,使其能测量高精度的直流磁场和交变磁场。霍尔传感器在作位置传感器使用时,一般用永久磁钢随被检测物体运动,将霍尔器件固定在工作系统的适当位置,用它去检测工作磁场,再从检测结果中提取被检信息[2]。感应线圈车辆检测器是一种基于电磁感应原理的车辆传感器,将传感器埋在路下,并通有一定工作电流的环形线圈。当车辆通过环形地埋线圈或停在环形地埋线圈上方时,由于互感作用,在以铁质为材料的车身上产生涡流,涡流的磁场对感应线圈的磁场有去磁作用,从而通过检测该线圈的电感变化量来检测出车辆的存在[3,4]。利用高频电磁信号还可对特殊工况进行液位检测。
本文所研究的电磁传感器是用来检测导线位置的,其中导线通有100 mA 20 kHz的交变电流,这样在导线的周围就会产生交变的电磁场,通过检测感应线圈中感应电动势的大小即可判断通电导线的位置。
1 磁场的模型与磁场检测
由麦克斯韦电磁理论可知,变化的电场和变化的磁场并不是孤立存在的,变化的电场能够产生变化的磁场。如果在里面放置一个电感线圈,电磁感应会使线圈中产生交变的电流。在导线位置和导线中电流既定的条件下,线圈中感应电流(或者电压)是空间位置的函数。而且电感线圈具有原理简单、价格便宜、体积相对较小、频率响应快、电路实现简单等特点。因此,电感线圈就可以作为传感器。
直接分析交变的电磁场并不是一个可取方法,考虑到问题的线度远远小于20 kHz的电磁波波长,因此,可以先讨论直流的情况,然后将结果应用到交变的条件下[5]。如图1所示,由毕奥—萨伐尔定律知,通有稳恒电流I长度为L的直导线周围会产生磁场,距离导线距离为r处P点的磁感应强度为
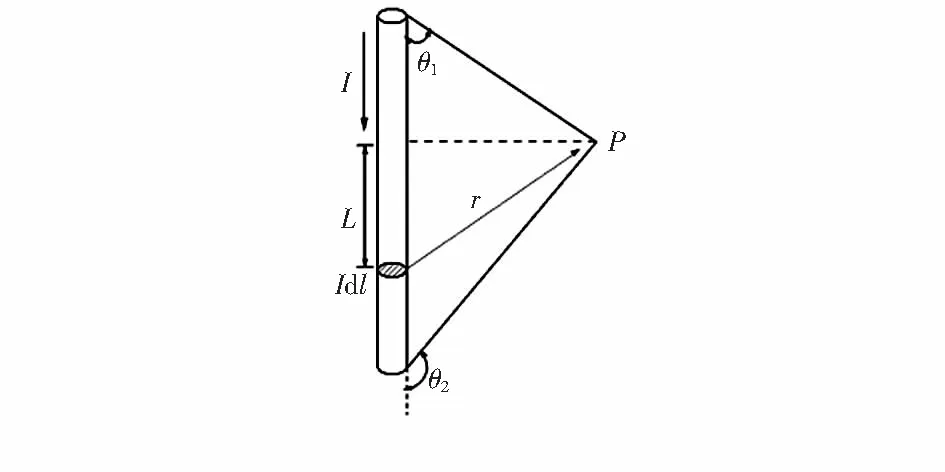
图1 直线电流的磁场

(1)
其中,μ0=4π×10-7T·mA-1,对于无限长直导线
B=μ0I/4πr.
(2)
若电感线圈距离通电导线的高度为h,水平距离为x,则有
(3)
(4)

(5)
(6)
由以上两式可以在Matlab中得到图2所示的关系曲线。定义通电导线左边的磁感强度为负值,导线右边的磁感强度为正值。该曲线的上半部分为高度h与磁感强度B的关系曲线,下半部分水平距离x与磁感强度B的关系曲线。

图2 高度和水平距离与磁感强度的关系曲线
2 循迹特性分析


图3 电磁传感器实物图
根据法拉第电磁感应定律,若通过以闭合导线为周界的开面的磁通量发生变化,则在闭合导线回路中产生感生电动势,感生电动势的大小等于磁通量对时间的变化率,则有线圈磁场传感器的内部感应电压E与磁感强度B(t)、电磁线圈的圈数N、截面积A的关系有
(7)
(8)
由上式可知,线圈中感应电动势的大小正比于电流的变化率,反比于线圈中心到导线的距离。其中,常量K为与电感线圈参数、线圈面积和一些物理常量有关的一个量,具体的感应电动势常量须实际测定来确定。
若只考虑直线的情况,如图4所示,记AC为电感线圈A到通电导线的水平距离,BC为电感线圈B到通电导线的水平距离。由式(5)~式(8)四式容易得到A,B两处垂直线圈中电磁感应电压的有效值为

图4 电磁传感器与通电导线相对位置
(9)
(10)
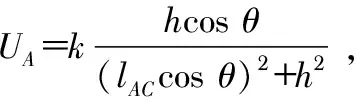
其中,k是一个与电磁环境和电感线圈有关的比例常数,可由实验确定。θ是通电导线与两电感连线的垂直线的夹角。由于直接用式(9)、式(10)两式来求解lAC和lBC不太容易,因此,在近似分析中,可以将cosθ去掉[7],则式(9)、式(10)两式可简化为
(11)
(12)
(13)
其中,lA+lB为已知量,h为离地高度,所以,根据上式即可算出通电导线距离2个电感线圈的水平距离。
3 实验数据分析
在试验中,设比例系数k值为1,离地高度h为8 cm,所测部分实验数据如表1。

表1 部分实验数据
将数据用Matlab进行拟合得到图5所示的曲线。

图5 拟合曲线
所得曲线的近似函数为
(14)
从拟合曲线可知,传感器与导线的交点到两电感线圈连线的中垂线的距离与传感器电压倒数差呈线性关系。在显著性水平α=0.05时,均通过了F检验、t检验和r检验3种假设检验方法,说明该数学模型可以用来近似检测通电导线的位置。
4 结束语
本文研究分析了一种电磁传感器的循迹特性,选用常见的电感线圈作为磁场传感器,导线中通过100 mA,20 kHz的交流电,这样在导线周围便产生了交变电磁场。由于通电导线周围的磁感应强度在一定的范围内才能检测得到,因此,该传感器的模型只适用于小范围的循迹检测,可用于无人搬运小车的路径导航。
参考文献:
[1] 杨昌茂.微功耗弱电磁传感器的设计[J].传感器论文集,2001(10):135-138.
[2] 冯爱萍,唐安详.基于霍尔电磁传感器的自卸车安全装置研究及应用[J].中国科技博览,2010(31);312-313.
[3] 林 凌,韩晓斌.微型感应线圈车辆传感器[J].传感器技术学报,2006(19):994-1000.
[4] 张 营,徐海贵,王春香.基于磁阻传感器的智能车辆定位系统[J].仪表技术与传感器,2008(11):1-7.
[5] 胡长晖,叶梦君,汪 漫,等.基于电磁技术的智能车路径识别的研究[J].湖北师范学院学报:自然科学版,2011(2):54-58.
[6] 宋 健,张 宾,于曙风.电磁感应传感器在喷雾机器人导航中的应用[J].传感器技术,2004(7):62-64.
[7] 李仕伯,马 旭,卓 晴.基于磁场检测的寻线小车传感器布局研究[J].电子产品世界,2009(12):41-44.