一种基于超声测距技术的超声液位仪设计*
2014-09-25刘智超
刘 赟, 王 波, 刘智超
(1.长春理工大学 光电信息学院,吉林 长春 130000;2.长春禹衡光学有限公司,吉林 长春 130000)
0 引 言
在石油、化工等领域常常需要对密闭容器(例如油罐等)中的液体液位进行测量,而国内外传统的液位测量手段大部分是机械式检测[1]。对于液体液位的检测而言,有很多种检测手段,如,人工检尺、浮子液位仪、磁致伸缩液位仪、雷达液位仪、激光液位仪、光纤液位仪以及超声液位仪等。人工检测、磁致伸缩液位仪、光纤液位仪都需要接触测量,不适合密闭容器;激光液位仪可非接触测量,但密闭容器中采用光学探头容易受污染,影响测量;浮子液位仪可以应用于密闭容器,但液面波动易造成误差且只可用于非腐蚀性液体;雷达液位仪精度高、可用于密闭容器检测,但系统结构复杂,价格昂贵;相比之下,超声液位仪成本低、易于实现,设计开发针对密闭容器的超声检测系统具有很强的实用意义[2,3]。
国外在液位检测方面技术已经非常成熟了,不但品种多而且性能优越。具有国际领先地位的该类传感系统有:如美国Karonic公司的Sonometer系列超声液位仪,具有高精度、连续测量、耗能低等特性[4];德国E H公司的Proso-nic MFMU系列超声液位仪,采用整机一体化设计,非接触连续液位检测,还具有对浆料、粗料的检测能力[5];加拿大Siemens公司的ML系列,具有测量速度快、体积小、便携性高等优点[6]。国内在超声液位检测领域具有独立知识产权的产品也有不少,如,中科院声学研究所开发的KS系列是具有较强检测能力的液位检测系统[7];西安华舜公司的HS系列超声液位仪,精度高,其误差约为0.1 %;沈阳沈拓公司自行研发的USS系列超声液位仪;大连西格玛公司的Seagma系列超声液位仪具有一体化、便携式的设备特性[8]。本文研究开发的是一种应用于密闭容器的非接触式超声液位检测系统,样机预期技术指标满足检测精度1 mm,测量范围0.01~2 m的性能。
1 基本原理
对于密闭容器内液体液位高度的检测而言具有一定的特殊性,共振、频差、衰减等方法均受到一定限制,只有回波法比较适用。超声波是超过人听觉最大频率的声波,一般高于20 kHz。超声波对固体而言有很强的穿透性,当超声波穿过容器壁后在被测液体中传播时,出射液体时会在界面处产生回波,当被测液体已知时就可求解液体液位,检测原理如图1(a)所示。
换能器产生超声波,由容器底部发射,遇到容器壁时产生第一回波(如图1(b)),在被测液体中传播一段后出射液体,此时由于液体与空气的界面而产生第二回波。两回波的时间差用Δt表示,若超声波在液体中的传播速度为v,则被测液体液位有
(1)
由式(1)可以看出,当已知超声波在被测液体中速度时,只要求出2次回波信号的时间差Δt,就可以计算得到液体的液位。可以采用换能器与计数器相连的方法,在发射超声波时开启计数器,设计数器频率为f,两回波之间计数为N,则有被测液体液位有
(2)
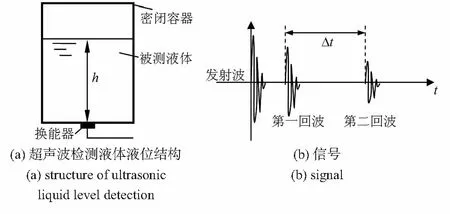
图1 超声波检测液体液位结构与信号示意图
2 超声波液位检测系统设计
系统总体设计如图2所示,由2个换能器采集超声波,发射、接收模块传输数据,通过数字信号处理器(DSP)处理回波信号,最终显示。由于超声波在液体中传输时受液体种类、温度、压强等因素影响,从而速度有所变化,为了保证系统可以实现高精度测量,避免引入由于环境因素不同而使传播速度改变造成的误差。系统设计了2个超声检测装置,其中,换能器1用于检测液体液位,而换能器2用于提供当前条件下液体内超声波的传播速度。因为换能器2发射的方向上l距离内都是液体,所以,超声波在液体中的传播速度等于距离l除以2次回波的时间差Δt2,则有
(3)
其中,l为容器的已知距离; Δt1,Δt2分别为换能器1,2接收到的2次回波信号差;N1,N2分别为换能器1,2对应的计数器的计数值;f为计数器频率。在本设计中,即使由于液体温度、压强等变化而导致超声波在液体中传播速度发生改变,由式(3)可知,并不影响系统的测量精度,保障了系统的高稳定性。
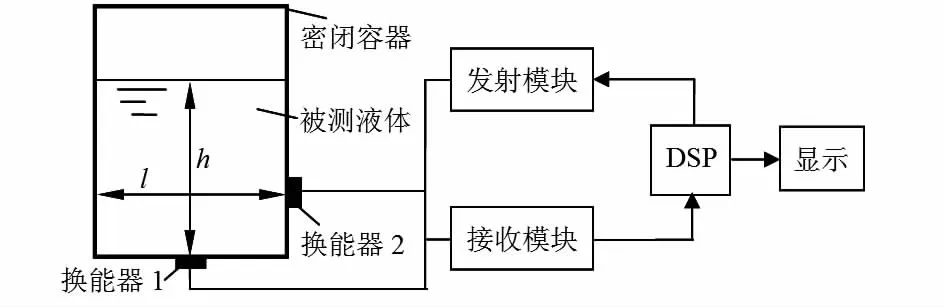
图2 密闭容器内超声波液位检测系统结构图
3 换能器的选择
对于采用超声波作为探测波的系统而言,换能器的选择常常决定了系统的工作性能和测试效果。换能器本身根据超声波在介质中的各种效应、特性等设计的,以电声换能器最多。发射时,通过高压电脉冲作用将电能变换为机械能,进而变换为声能。接收时,将相应的声能转换成电能。
设发射换能器的工作面积是S,发射频率是f,发射波长是λ,则系统指向性增益可得
(4)
而超声波在液体中的吸收值有
α=(k1+k2f)f.
(5)
其中,k1,k2分别为散射、吸收衰减系数。由式(4)可知,超声波的频率越低指向性越差,频率越高指向性越好。但由式(5)可知,超声波的频率越高,被吸收的能量越大,频率越低,被吸收的能量越小。故本系统对频率的选择需要综合考虑,采用计算系统接收灵敏度的方法。
设换能器产生超声波的功率为P0,而超声波回波的功率为Pt,检测距离为h,则有能量方程
(6)
由式(5)可得
(7)
将式(7)代入式(6)后,对λ求偏微分有
(8)
当灵敏度取最大时,偏导数为0,则波长有
(9)
再将此时的吸收值带入式(8),可求出最佳频率有
(10)
以常温下水为例,取k1=3.0×10-8Np/m·s/kHz,k2=1.5×10-4Np/m·s2/kHz2,而密闭容器总长距离h约为2 m,换能器工作面半径1 cm,则对应频率选择为3.0 MHz,可以较好地满足指向性与检测灵敏度的要求。
4 实 验
在常温常压条件下,用带标准刻线的容器装入水。实验用超声探头频率为3.0 MHz,密闭容器的壁厚为4 mm,用100 cm范围内,每改变100 mm的水位检测数据与标准液位变化值作对比。每组测试数据采集3次求平均值;再计算出测试数据与标准值的相对误差,实验数据如表1所示。
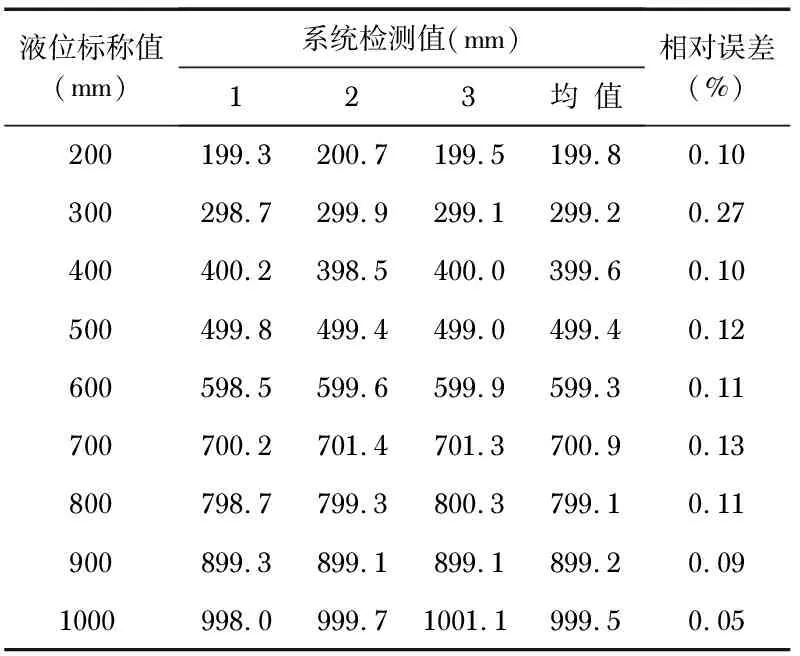
表1 超声水位液位检测数据表
通过表1的实验数据可知,本系统的超声液位检测结果个别测试数据超出了1 mm的检测精度,但是通过3次采集求平均的方法可以弥补由于外界干扰等造成的测量误差。最终,检测均值与标准液位值之间的差均小于1 mm,相对误差全部低于0.5 %,符合设计要求。
5 结 论
本文设计了一种用于密闭容器内的液体液位超声检测系统,在分析计算超声回波能量的基础上,采用DSP控制电路,搭建了低噪声、大动态范围的检测电路。实验在10~100 cm范围内液位每10 cm变化一次,系统多次采集求平均值,平均值与标准值之差小于1 mm,相对误差均小于0.5 %,符合设计要求。本系统可以对密闭容器内液体液位进行检测,具有精度高、速度快的特点。
参考文献:
[1] 李 烨,尹征琦,刘智勇.嵌入式超声液位计的设计[J].自动化与仪表,2005(1):18-20.
[2] 李一博,金翠云,靳世久.C8051F020在磁致伸缩液位传感器中的应用[J].仪器仪表学报,2003,24(4):219-221.
[3] 黄 彤.Smart Radar液位计在罐区的应用[J].自动化仪表,2007,28(10):58-60.
[4] 马志敏,王 敏,刘珍秧.大型压力容器定点液位的超声非介入式检测[J],无损检测,2003,25(12):626 628.
[5] Hernandez Alvaro,Urena Jesus,Mazo Manuel,et al.Reduction of blind zone in ultrasonic transmitter/receiver transducers[J].Sensor and Actuators A,2007,133(2):96-103.
[6] 郑慈航,唐 刚,刘景全,等. 超声液体环境下压电式振动能量采集的研究[J].传感器与微系统,2011,30(3):53-56.
[7] 张向珂,张世庆,闻凤连,等.高精度相位法超声测距系统研究[J].传感器与微系统,2010,29(2):51-53.
[8] Berson M,Gre’goier J M,Gens F.High frequency(20 MHz)ultrasonic devices:Advantages and applications[J].European Journal of Ultrasound,1999,10:53-63.
