随机演变模型和在环车辆模型的驾驶员行为特性研究方法概述
2014-09-24周致成
石 晶,袁 航,李 刚,韩 松,周致成
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001; 2.沈阳建筑大学 市政与环境工程学院,辽宁沈阳 110168)
驾驶安全是指驱动车辆或移动或静止时驾驶员、车辆主体、车载电子控制系统、道路以及其它部分的安全。驾驶员的错误操作是造成交通事故的主要原因。更好的了解驾驶员的驾驶行为并对电子控制系统进行优化,不仅有助于提高车辆的安全性、舒适性和燃油经济性,还可以为驾驶员驾驶行为特性分类研究做理论基础。
驱动车辆不是一个单一的系统,它是包括驾驶员、车辆主体、周围环境和电子控制系统在内的一个整体。其中的每一部分都是一个子系统并有它们自己的信息流。当这些子系统的协调与整合难以实现的时候,驾驶条件的方便性、舒适性、安全性和燃油经济性将会受到限制;然而更好地协调与整合这些子系统会比单一的子系统提供更好的功能。这是进一步推动汽车技术的一个关键技术。随着电子控制技术、软件和计算精度水平的不断提高给当前车辆提供了更多新型的智能化功能。这些功能主要是根据车载电子控制系统的能力来判断驾驶条件和驾驶员喜好并做出相应的调整,最大限度地提高驾驶员的安全性、操纵性和舒适性,同时保证驾驶员对车辆的绝对控制。近年来人们对驾驶员驾驶行为特性的研究主要是利用随机演变模型和驾驶员在环车辆模型对驾驶员驾驶行为进行实时识别。文章对这两种方法做了简单的介绍,并提出了在未来研究工作中的重点。
1 随机演变模型对驾驶员特性的研究方法
根据演变模型结构概念得到的演变样式能够适应操纵条件和驾驶员行为之间映射的变化,而不是单独的参数适应。概率模型聚集了转换或软转变相对于不同操纵条件下的模型之间的概率。条件演变模型是一个多维结构。多维模型结构中的每个子模型都是某种操纵条件下的典型驾驶员行为。利用随机演变模型可以对跟车时的驾驶员特性进行实时的研究分析。这一方法是通过一种特殊类型的条件演变模型来考虑驾驶员特性的。在这种模型中可以实时的获得在不能预先定义不同操纵条件下的驾驶员模型结构和参数的信息。这些模型将传统改进的实时识别技术与概率模型相结合,获得了不同操纵条件相互转化的可能性。
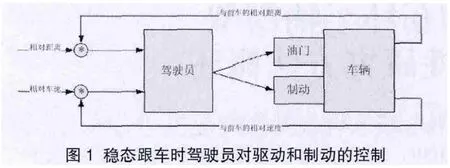
在跟车时,驾驶员的行为作为一个反馈控制来调整节气门位置和制动压力的大小以实现预期的车辆控制。如图1所示,驾驶员可以通过控制油门的大小来减小车辆与前车的相对距离,或控制制动力来增加与前车的相对距离,或一同控制油门与制动来保持与前车距离和速度的一致。无论哪种目的,驾驶员在环车辆系统的闭环响应都能实现驾驶员某些所需的性能。
尽管不同的车辆有不同的节气门开度和制动压力,但驾驶员通过调整自己的行为可以使不同汽车输出相似的期望的车辆动力学响应。也就是说,虽然控制器各种各样,但驾驶员的目的是想获得类似的车辆运动模型。因此,在跟车时可以建立驾驶员的纵向操纵行为,这时车辆动态行为可以从驾驶员在环系统响应中获得。
这种方法通过建立稳态跟车时的驾驶员在环车辆模型和瞬态跟车时的驾驶员在环车辆模型来获得不同车辆运动状态时的驾驶员行为。当目标车辆处于稳态跟车时,驾驶员不需要突然踩下制动踏板和油门踏板,这时驾驶员有两种选择来决定目标车辆与前车的响应:①与前车保持安全距离;②与前车保持相同的车速和合理的车距。当目标车辆处于瞬态跟车时,此时要求驾驶员即保持与前车有相同的车速又要保持与前后车有恒定的车距。但由于驾驶员行为受到很多因素的影响,如路面、交通环境和驾驶员的情绪和身体状态,这种方法的多维结构模型还有待进一步的研究。
2 环车辆模型实时识别驾驶员行为的研究方法
在20世纪90年代末期,上海交通大学的石坚等人在人-车-路综合环境中利用神经网络对驾驶员转向特性进行了模拟和仿真研究。他们将车辆转弯时的转向盘转角分为预瞄和反馈两部分,如图2所示。在预瞄过程中,驾驶员用眼睛注视前方路面,并将预设轨迹上的一点作为目标点来操纵转向盘;在反馈过程中,驾驶员根据车辆的反馈信息对转向操作进行修正。利用实际测量的驾驶员转向操作的多组数据,对神经网络进行了建模与学习训练,使之能够较准确地反映驾驶员的转向操作。但由于当时电子系统和软件的限制,这种研究方法只能由某一特定的车辆和驾驶员所得到,不具有广泛性。

图2 人-车-路系统中的转向模型
驾驶员在环车辆模型是指将人的主观操作于驾驶模拟器组成一个闭环的回路。建立驾驶员行为模型的理论依据主要有控制原理、模糊模型和随机逼近原理。一个实时的驾驶员模型可以使电子控制系统与驾驶员一同工作,同时电子控制系统提供适当的支持,使车辆适应驾驶员的行为。驾驶员控制结构或行为具有技能基础、规则支配和活动表现等特性。在进入危险情况之前驾驶员需要根据车辆的响应检测系统故障,并根据驾驶条件调整自己的控制。他同样可以根据他身体和情绪的状态以及以往的经验认知负荷,并对车辆的控制做出决策。
由于车辆受驾驶员和电子控制系统的影响,所以利用驾驶员在环系统识别技术来处理识别驾驶员控制结构,如图3所示。驾驶员的控制决策是一个复杂的驱动过程的结果。它包括两个主要的信息,一个是客观信息,它通过各种传感器,控制器和咨询系统随时提供给驾驶员;另一个是主观信息,它包括视觉的,情感的和经验的信息,这些信息都在一定程度上影响着驾驶员的控制决策。当客观信息对驾驶员和电子控制系统有效时,主观信息通常是难以到达电子控制系统的,这是一个难以获得足够的驾驶员的驾驶行为特性的主要原因。这种基本的不确定性是人们专注研究驾驶员行为局部特性的主要原因。

图3 驾驶员-车辆系统中的认知信息流(实线)和主观信息流(虚线)
利用驾驶员在环车辆模型的动力学控制可以对驾驶员行为做实时的研究与分析。这一方法用驾驶员操纵行为,前后车的相关量和车辆的状态响应(纵向加速度和减速度)等信息提出了三种方法。①利用驾驶员的驾驶行为来获得长期驾驶意图,这是获取驾驶员一般控制策略的非结构性方法;②使用跟车工况下驾驶员的驾驶行为与前后两车距离的输入-输出关系建立驾驶员控制的模糊策略;③利用车辆动态响应(车辆纵向加速度和减速度)与前后两车距离的输入-输出关系,识别跟车工况的驾驶员PD控制策略。每一种方法对实时监测的实现都有他们自己的优点和适用的范围。但对驾驶员特性的通用模型的结构和参数的更详细的研究将是未来工作的主题。
3 结语
更好地了解驾驶员的驾驶行为可以对电子控制系统进行更好的优化,有助于提高车辆的安全性、舒适性和燃油经济性。论文对驾驶员行为特性研究的随机演变模型和在环车辆模型两种方法进行了概述。两种方法中建立一个符合客观实际的实时驾驶员在环车辆模型是研究的关键。未来较长时间的研究工作可以结合车辆动力学商用软件搭建驾驶模拟器,通过大量的实验以及对实验数据的处理来分析驾驶员驾驶行为特性,为进一步研究驾驶员驾驶行为特性分类、辨识和实车应用奠定实验基础。
[1]P. Cacciabue, Modeling Driver Behavior in Autonomous Environ ments,Springer-Verlag, London, 2007
[2] Dimitar Filev, Jianbo Lu, Kwaku Prakah-Asante(,etal. Real-time Driving Behavior Identification Based on Driver-in-the-loop Vehicle Dynamics and Control:IEEE Press,2009.2020-2025
[3]Dimitar Filev, Jianbo Lu, Finn Tseng,etal.Real-time Driver Char acterization During Car Following Using Stochastic Evolving Mod els:IEEE Press,2011.1031-1036
[4]J. Lu and D. Filev,“Multi-Loop Interactive Control Motivated by Driver-In-The-Loop Vehicle Dynamics Controls: The Framework,”Proc. of 48th IEEE Conf. on Decision Control, 2009
[5]P.Angelov and D. Filev, An Approach to On-line Identification of Takagi-Sugeno Fuzzy Models, IEEE Transactions on System,Man, and Cybernetics, part B - Cybernetics, vol.34, No1, pp.484-498, 2004.
[6]金春霞,王慧.跟车模型及其稳定性分析综述[J].交通运输系统工程与信息,2001,(3):200-206.
[7]石坚,卓斌.用神经网络仿真驾驶员转向特性的研究[J].汽车技术,1999,(4):6-8.
[8]郭孔辉.人一车一路闭环系统主动安全性的综合评价与优化设计[J].汽车技术,1993,(4).
[9]E. Boer, N. Ward, M. Manser, and N. Kuge, "Driver-modelbased assessment of behavioral adaptation," Proc. of JSAE, May 16-20, Yokohama, Japan, 2005
[10]E. Boer and M. Hoedemaeker, "Modeling driver behavior with different degrees of automation: Ahierarchical framework of inter acting mental models," Proc. of the 17thEuropean Annual Confer ence on Human Decision Making and Manual Control, Valenci ennes, France, 1998
[11]G. Prokop, "Modelling human vehicle driving by model predic tive online optimization," Vehicle System Dynamics, Vol. 35,No. 1, pp. 19-53,2001
[12]C. MacAdam, "Understanding and modeling the human driver,"Vehicle System Dynamics, Vol. 40, No. 1-3, pp. 101-134, 2003
[13]I. Delice and S. Ertugrul, "Intelligent modeling of human driver:a survey," Intelligent Vehicles Symposium, Vol. 13-15, pp. 648– 651,2007
[14] H. Takahashi, "Human sensor system that predicts driving envi ronment using driver's fuzzy operational data," Japanese J. of.Fuzzy Theory and Systems, Vol. 4, pp. 709-734, 1992
[15]L. Qiao, M. Sato, and H. Takeda, "Learning algorithm of envi ronmental recognition in driving vehicle," IEEE Trans. on Sys tems, Man and Cybernetics, Vol. 25, pp. 917-925.
