博航超低空遥控飞行农业植保机结构性能及特点
2014-09-23张亦弛阳湘晖
■ 张亦弛 阳湘晖
湖南博航联合技术有限公司是我国最早研发超低空遥控飞行农业植保机的企业之一。博航BH300系列是以燃油发动机为动力的高性能农业植保低空遥控飞行作业机产品,该系列集飞行控制和作业信息反馈一体化的综合遥控器、计算机辅助人工导航系统、智能化农药喷洒系统以及安全耐用的直升起飞器,能适应各种复杂的飞行环境、起降场地以及气候条件。装备体积小,外场展开迅速,操作简单,运输方便,转场快捷。对大面积作业环境及专业植保合作社采用升级套件,包括一套便携式或车载式地面控制站,通过简单的触摸板进行操作,存储或调出需要作业的农地信息,如飞行航路、飞行高度与速度、喷洒剂量等作业信息。在进行作业的过程中,通过地面站可以实时监视各项飞行参数,同时可以对飞行及喷洒系统进行遥距控制。当飞行遇到紧急情况能自动返航,自动着陆,大大提高了植保作业的安全性。
1 BH300系列主要性能参数
博航系列低空遥控飞行农业植保机作业能力强、飞行质优良,超低空喷洒农药确保充分覆盖,用最少的剂量达到最大的防治虫害效果。BH300系列主要性能参数列表1。博航飞行农业植保机除病虫害监测及喷洒农药治理的植物保护外,还可应用于:植物施肥——植物的生产态势监测、施肥;作物成熟度监测——为精准收割提供及时准确的数据;农业自然灾害监测——为相关部门防灾减灾提供依据;地理测绘——利用航拍技术对农田进行地理测绘,推进农田基本资料数据库建设。
2 遥控遥测系统结构及性能
(1)综合遥控器。①遥控器通道数:14通道(12个比例式,2个开关量);②发射/接收频率:2.4GH z FASST;③最大遥控距离:1km(视距);④任务显示器:7”高亮彩色液晶显示器;⑤自动增稳仪:6自由度MEMS惯性测量单元;⑥硬件:GPS全球定位系统,气压传感器,地磁传感器,10通道舵机控制器包括4个专用任务舵机接口;⑦软件优化:鲁棒算法及地专家系统;⑧悬停精度:垂直方向±0.5m,水平方向±1m;⑨其它:最大耗电功率5W,质量150g。
(2)地面站(选件)。①系统要求:WindowsXP(32位),WindowsVista(32位),Windows7(32位或64位);②硬件要求:CPU:IntelCore i3或以上,内存1~4GB;③接口USB或R S232C;④显示器1024×768或以上;⑤人机界面为键盘+鼠标。
(3)无线通信链路(选件)。①通信接口:USB2.0或R S232C;②通信频率:900MHz;③发射功率:1000mW;④通信宽带:115.2Kbps;⑤通信距离:10km(视距)。
3 飞行器特色与功能
(1)动力系统。采用自主研发的“混合动力”,通过特殊设计的翼型和匹配的动力传动机构,当飞行器遇到阵风或气流时动力系统能够作出快速响应,保持飞行姿态的稳定性,能在5级大风等恶劣天气下安全执行任务。内置减震结构,集成锁尾陀螺,且发动机具有定速器功能。
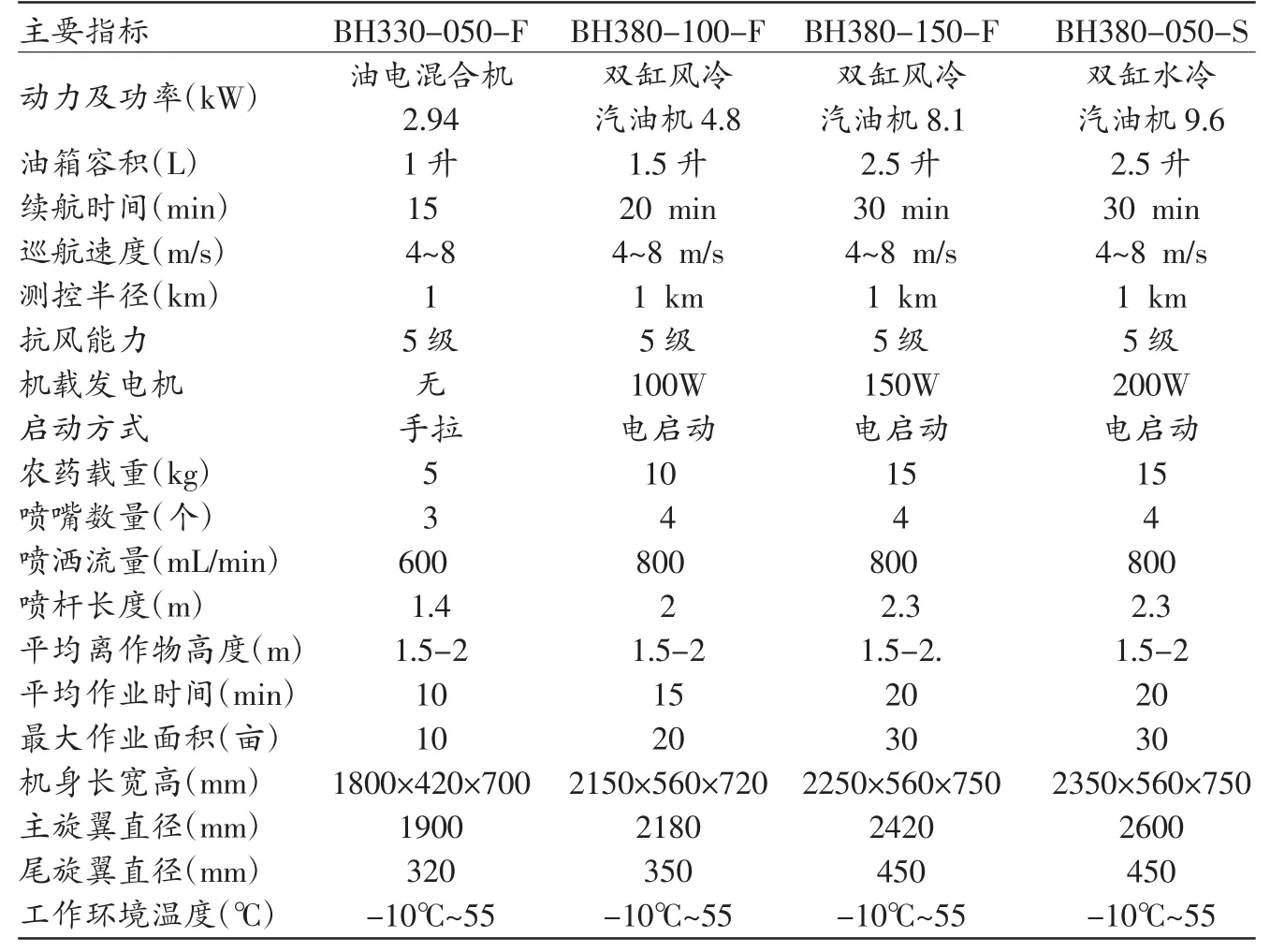
表1 BH 300系列主要性能参数
(2)应力结构件。飞行器的高应力结构件全部采用航空规格的7075-T6铝合金,经过热处理强化,强度高、抗腐蚀性能强、可靠耐用。利用玻璃钢和蜂窝夹层等复合材料制作而成的坚固外壳可以承受一般的外力撞击,并对飞行器的航电系统起了初级保护。
(3)飞行控制系统。系统结构包括GPS、6自由度惯性测量单元、磁场计、气压高度计等精密传感器。全自动GPS定位、定高、姿态增稳模式使飞行器的操作更为容易。系统升级后可实现全自主模式支持自动起降、自动执行植保作业任务。具备失控保护和自动返航功能。飞行控制系统采用优化的高鲁棒性H无穷算法模型,保持飞行姿态的稳定性,即使在大风天气悬停的精度也不会受到影响。
(4)控制模式及综合遥控器。基于综合遥控器的全手动模式,姿态示稳模式和GPS巡航模式,基于自定义遥杆或半自动驾驶模式,基于地面站系统的无人干预全自动飞行模式。集成业内领先的Futaba RC遥控器,结合博航自主研发的植保作业控制系统,成为一套操作简便,功能齐全的植保作业操作系统。系统界面简单易用,除了关键信息即时显示功能外还有同步的声音提示,作业人员的目光不需要离开正在作业的飞行器能即时了解直升机的状况。对以下异常情况作出及时报警:速度偏差,航线偏差,高度偏差,剩余作业时间不足2分钟,剩余药量不足1升,剩余油量不足0.5升,发动机温度过高,发动机马力过低,电池电压过低等。
(5)系统展开迅速且作业时间长。系统可使飞行器最短能够在2分钟内从地面自主起飞,执行任务。作业时间长,可达25分钟。可按用户要求增加油箱容量以提升续航能力。最大飞行速度根据作业要求可随时调整,自主飞行速度最高可达90km/h。机载发电系统,省却地面反复充电和电池管理等烦琐工作。机载备用电池同时能确保高可靠供电。
(6)地面站系统(选件)。智能化人机操作界面,支持一键起飞,一键返航,一键着陆。可靠加密的通讯协议,有效测控距离为10km(视距)。自动检查飞行路径的正确性,实时反馈精确飞行数据,实时改变飞行路径。航点属性设置:高度,经纬度,转弯模式,飞行速度,航点超时。飞行任务控制,航拍快门控制,空投控制。提供简单地图测绘,正射摄影辅助工具包。
4 喷雾系统及作业流程
(1)喷雾设备。采用原装进口、高精密、抗磨损、航空作业专用的陶瓷喷雾喷雾部件,寿命长,工作稳定。聚丙烯喷嘴体由陶瓷喷孔材质构成,采用ISO颜色编码,根据流量和雾滴大小提供多样化喷嘴,最大工作压力为3kg,喷雾角度为110°。
(2)适用农药。适用于杀虫剂、防霉剂、脱叶剂和植被肥料等喷雾作业,用于苗后触杀型除草剂、杀菌剂和杀虫剂,细小雾滴和下泻气流确保药剂达到施药目标区域。压力为3kg及以上时,可与落叶剂和叶面肥配合。喷雾剂量自动控制系统,能按照飞行高度与速度实时调整农药施放的剂量,确保最精确的喷洒作业及覆盖面。
(3)作业流程。①到达作业现场取出装备,给飞行器注入汽油及作业用农药;②打开设备电源,检查机器及喷雾系统工作是否正常;③通过综合遥控器设定作业信息,如农地编号、农药编号等并检查各项预设定信息是否正确;④确保起飞场周边安全后启动发动机;⑤打开综合遥控器的自动增稳开关并缓缓提高飞行器的飞行高度,通过综合遥控器的两根遥杆控制直升机前、后、左、右、上、下告示动作,把直升机移动到预设高度和作业起点;⑥打开自动喷雾系统开关,开始喷雾作业;⑦按照综合遥控器任务显示屏上的仪表信息和预设航路控制直升的前进飞行,遇到严重偏航或高度误差时任务显示屏会出现报警信息,同时以图标和声音的方式提示操作员对飞行姿态进行修正;⑧当油料或农药耗尽,任务显示屏即时报警并自动记录飞行器当时所在位置,操作员控制飞行器返回预设着陆点;⑨飞行器到达着陆点的上空,操作员拉动下降遥杆,直升机平稳缓缓下降;⑩当飞行器起落架触地后,操作员关掉遥控器的发动机熄火开关,进行简单检查后注入汽油和农药继续作业。
