基于PIC16F877A的永磁无刷直流电机的控制器设计
2014-09-23王宇鹍丁海波杨华松徐晨路
王宇鹍,丁海波,杨华松,徐晨路
(1.中国煤炭科工集团沈阳研究院 辽宁 抚顺 1131222;2.辽宁省医疗器械检验所 辽宁 沈阳 110179)
基于PIC16F877A的永磁无刷直流电机的控制器设计
王宇鹍1,丁海波2,杨华松1,徐晨路1
(1.中国煤炭科工集团沈阳研究院 辽宁 抚顺 1131222;2.辽宁省医疗器械检验所 辽宁 沈阳 110179)
随着科技的发展,对无刷直流电动机的性能提出更高的要求。本文在研究无刷直流电动机数学模型、导通方式的基础上,以单片机PIC16F877A为核心设计控制系统硬件电路和软件程序,硬件电路包括电机转子位置检测电路、PIC16F877A最小系统、转子位置检测电路、IGBT驱动保护电路和系统信息反馈电路,并利用MPLAB软件编译平台编写控制系统软件程序。通过对实验结果的分析:可知本文所设计的控制系统性能可靠、结构简单,能够实现对无刷直流电机的可靠控制。
PIC,永磁无刷;电机;控制系统
电动机是将电能转换为机械能的常用装置,按照工作原理将电动机分为直流电动机和交流电动机。直流电动机具有平滑稳定的调速特性和优良的启动性能,所以在需要频繁启动和速度变化要求较高的场合如机床、风力发电机、轨道列车、和轧钢场等设备上有广泛应用。但传统直流电机转子换相过程依靠电刷和换向器直接的配合,换相过程会产生火花和电磁干扰,对周围电气设备的电磁兼容造成很大影响,同时,电刷属于易耗器件,需要定期检查和更换,消耗大量人力资源和原材料的浪费。为了解决上述问题,很多专家、学者对无刷直流电机开展大量研究工作。
无刷直流电动机作为机电一体化的典型产品,具有传统直流电动机的调速特性好、运行稳定,又具有交流电动机结构简单、便于维护的优点,所以在部分领域得到初步应用。稀土材料的发展使得无刷直流电动机得到进一步的发展,但采用稀土材料制成的无刷直流电动机成本过高,仅应用在航空、航天和军用等高科技领域。20世纪80年代钕铁硼永磁材料出现后,大大降低了无刷直流电动机的成本,为无刷直流电动机其在民用领域的应用提供可能,从几十瓦至上百瓦的无刷直流电动机在汽车、机床、仪器仪表和石化化工等等民用领域初显身手。
随之电力电子技术和现代控制理论的快速发展,使得电动机技术获得跨越性的变化,电机制作工艺和控制理论不断成熟,关于无刷直流电动机控制技术研究是当今高校和科研单位研究的热点。本文在对无刷直流电机数学模型、运行过程和主回路导通方式研究的基础上,基于PIC16F877A设计了无刷直流电机控制系统,主要包括PIC16F877A最小系统、转子位置检测电路、IGBT驱动保护电路和系统信息反馈电路,并利用MPLAB软件编译平台编写控制系统软件程序。
1 无刷直流电动机
1.1 永磁无刷直流电机
永磁无刷直流电动机利用电与磁之间的关系,在电动机转子上装有永磁材料,定子上缠绕三相线圈,线圈通电时产生电磁场,电磁场和永磁体磁场之间相互作用使电机旋转,随之转子的旋转三相绕组线圈换相,为电动机旋转提供持续转矩。永磁体采取径向充磁的瓦形稀土永磁体。电动机定子三相绕组采用星型连接方式,处理器检测转子的位置,定子根据微处理器发送的信号进行换相,保证电机持续旋转[1-2]。
1.2 无刷直流电动机数学模型
分析时对理想的永磁无刷直流电动机作如下假设:
1) 电动机定子三相绕相之间完全对称,气隙磁场为方波,定子电流和转子磁场分布的磁场为对称方波。
2) 忽略电动机齿槽、换相过程和电枢反应等造成的影响。
3) 电枢绕组在定子的内表面上的分布方式为连续均匀的。
4)电动机定子电流为三相对称1 200(电角度)的矩形波,定子绕组为600相宽的集中整矩绕组。
为了减小转矩产生纹波,永磁无刷直流电动机的气隙磁密波形应该和供电电流的波形相同。在理想状态下,矩形波定子电流和相同波形的气隙磁通相互作用,两者相结合产生恒定的电磁转矩。
1.2.1 电压方程
根据电动机电压平衡方程

式中,U表示三相绕组中的电压,r表示每相绕组的电阻值,i表示运行时每相绕组中的电流,L表示每相运行电感,E表示每相反电动势。有公式(1)可得运行时的无刷直流电动机电压方程:
其中,ua、ub、uc为外加的A相、B相、C相相电压,ia、 ib、 ic是A相、B相、C相相电流,L为每相电感的自感,Mab、Mbc、Mca为每两相间的互感,ea、eb、ec为A相、B相、C相每相的反电势。ra、rb、rc为 A相、B相、C相相电阻。
无刷直流电机三相六状态每次导通两相,且为绕组Y形连接方式,另外

其中,ia、ib、ic是A相、B相、C相相电流。
1.2.2 转矩方程
在电磁转矩上无刷直流电机和普通直流电机相似,电磁转矩和磁通、电流幅值成正比变化,即:

其中,Te为电动机的额定转矩,Pn为电动机的极对数;ωr为电动机的角速度;ia、ib、ic是A相、B相、C相相电流;ea、eb、ec为A相、B相、C相每相的反电势。无刷直流电动机(忽略转动时的粘滞系数)的方程可写为:

其中,Te为额定转矩,TL为负载转矩,J为电机转轴上的转动惯量的总和。ω为机械角速度。
1.3 主回路导通方式
三相半控和三相全控是无刷直流电机控制系统主回路控制方式的基本类型[3],无刷直流电机示意图如图1所示。三相半控电路采用3个功率器件控制绕组的导通方式,每个绕组由一个功率开关控制,一个周期只有1/3时间导通,另外2/3时间不通电,绕组没有得到充分的利用。三相全控电路采用6个功率器件控制绕组的导通方式,同一时刻至少有两相绕组导通,绕组得到充分利用,所以我们采用三相全控式电路。

图1 无刷直流电机示意图Fig. 1 The diagram of brushless DC motor
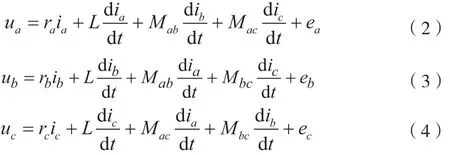
在三相无刷直流电机全控式控制系统中,绕组导通方式常见的有两两导通方式和三三导通方式。采用在两两导通方式时,每个时刻都有不同桥臂的两个功率器件导通,定义流入绕组的电流产生的力矩方向为正Ta,则流出(另一个绕组)电流产生的力矩方向为负Ta,则它们的合成力矩为3 Ta,如图2(a)所示。
采用在三三导通方式时,每个时刻都有不同桥臂的3个功率器件导通,相邻两次换相的电角度为600,功率器件导通的电角度为1 800。如果认定流入绕组的电流产生的力矩方向为正Ta,则流出(另一个绕组)电流产生的力矩方向为负Ta,则它们的合成力矩为1.5 Ta,如图2(b)所示。
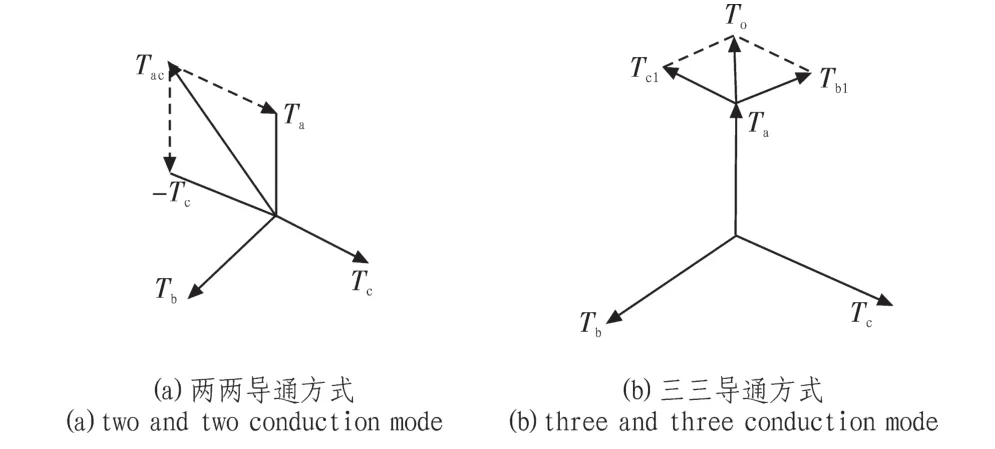
图2 不同导通方式的合成力矩Fig. 2 Synthesis torque of different conduction mode
从上面的分析可以看出,对于三相Y接高压断路器无刷直流电机,为了获得较大的输出力矩,主回路通电方式采用两两导通方式更适合[4]。
2 系统的硬件设计
2.1 硬件的结构
基于PIC16F877A的无刷直流电机控制系统硬件框图如图3所示,控制系统分为单片机最小系统、控制电路和控制对象三部分,其中单片机最小系统是指以PIC16F877A为核心包括电源模块、晶振复位模块和外部扩展模块,控制电路包括光耦隔离电路、驱动逆变电路、电流检测电路、转子位置检测和驱动保护电路,控制对象为永磁无刷直流电动机。PIC单片机最小系统为单片机提供工作所需的电源、时钟信号、复位信号、和存储器扩展。控制电路控制电动机绕组在合适的位置换相、驱动电动机持续运行,同时检测系统参数,保证系统可靠稳定运行[5]。
图3 控制系统的硬件框图Fig. 3 Hardware diagram of control system
2.2 转子位置检测电路设计
霍尔传感器的工作原理是半导体器件的霍尔效应,是无刷直流电机换相控制中应用较多的位置传感器。根据霍尔元件的特性不同分为线性霍尔元件和开关型霍尔元件,线性霍尔元件输出时一个和磁场成正比的连续信号,常用于连续量如位移等的测量,开关型霍尔元件的输出时一个根据磁场强弱而变化的高低电平信号,常用作无刷直流电机的位置传感器。根据控制系统实时性要求及安装方便,本控制器采用锁存型霍尔元件作为电机转子位置传感器。
根据电机内部电磁场分布,将3个霍尔传感器安装在霍尔盘上,相邻两个之间的夹角为60°。由于在电机内部不易安装霍尔盘及拆卸不方便,故将其安装在电机的外部,制作一个圆形磁钢模拟电机内部电磁场分布,霍尔元件的空间分布和输出特性如图4所示[6]。当控制系统工作时,霍尔元件根据磁钢的位置输出高低电平,主控制芯片根据高低电平信号判断电机转子位置,调用内部程序输出正确的驱动信号,使电机开始动作。随之电机转角的变化,霍尔元件的输出也发生变化,主控芯片根据霍尔元件的高低电平来确定IGBT的导通顺序,使电机持续旋转。

图4 霍尔元件空间分布和输出特性Fig. 4 Space division and output curve of hall element
2.3 IGBT驱动保护电路设计
根据系统需求,设计IGBT隔离驱动电路是功率驱动电路的关键。VLA517-01R是替代EXB841的快速型IGBT集成驱动芯片,整个电路延迟时间不超过1μs,最高工作频率达40~50 kHz,只需外部一个 20 V电源供电,内部可产生一个正驱动电压及反向截止电压,模块内部含有过流保护和故障信号输出电路。EXB841输入端15和14管脚有10 mA 的电流流过时,内部光耦导通,3脚输出驱动电压使IGBT导通,驱动信号截止,光耦截止,3脚输出反向电压使IGBT截止。本文所设计的IGBT驱动保护电路如图5所示。

图5 IGBT驱动保护电路Fig. 5 Circuit of IGBT drive and protective
3 软件设计
PIC单片机仿真器提供存储器和时钟,并能运行代码,即使没有与目标应用板相连。在开发和调试期间, ICE提供了最强大的能力来发挥系统的所有功能,这样允许用户对应用方便地进行测试、调试和再编程。控制器硬件电路设计完成以后,接下来是软件编制工作。在软件设计过程中,一般首先根据实际情况理清程序的运行过程,在结合硬件电路的特点设计出软件的流程图。在具体程序设计中,一般先把要用到的中断进行定义和把变量定义到RAM中等,然后定义各个子函数,再编写各个子函数,最后进行调试。
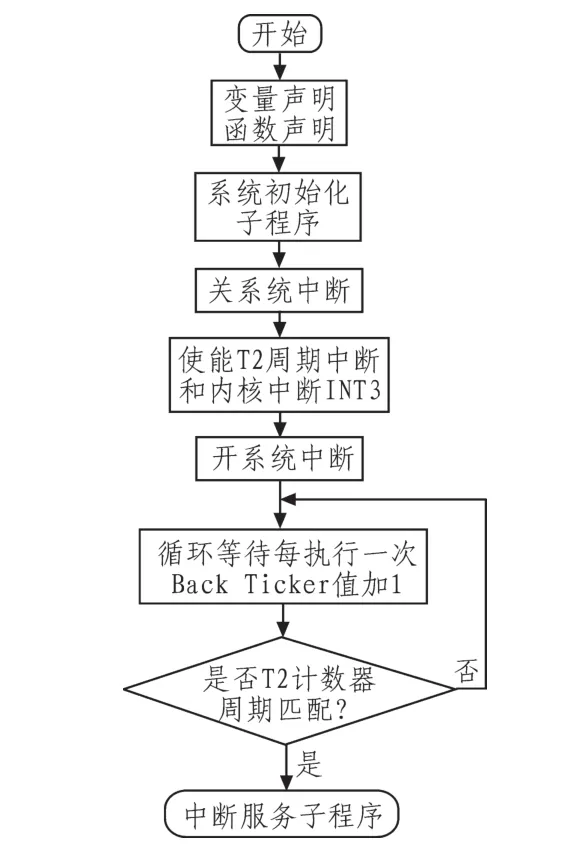
图6 主程序流程图Fig. 6 Main program flow diagram
软件程序是系统的灵魂,本文所设计的控制系统软件程序由系统主程序、中断服务子程序、速度检测子程序和故障保护子程序组成。主程序中设定了系统的中断信号由PIC单片机的事件管理器T2定时器的周期中断来触发,当T2周期匹配时,调用中断服务子程序,通过速度检测子程序将检测量作为反馈值与设定的速度值比较,调节PWM的占空比,实现电机速度的调节。故障保护子程序检测系统的电压、电流和温度,与给定安全值进行比较,当发成故障时,发出错误警报并封锁控制信号输出,实现对控制系统的保护主程序、中断服务子程序和故障保护子程序如图6~8所示。

图7 中断服务子程序Fig. 7 Subprogram of interrupt service

图8 故障保护程序Fig. 8 Program of fault protection
4 控制系统与电机试验
将设计好的系统与电机联机实验,电机的额定功率为900 W,额定电压为150 V,额定负载为4.31 N·m。通过示波器TDS1012观察发现实际运行状态下的霍尔反馈信号和理论分析结果完全一致,控制器的三路霍尔位置信号为空间上相差1200电角度的矩形波。实验过程分别测量负载转矩为0 N·m、2.2 N·m和4.4 N·m时电机电流,如图9所示。从图可知:电机的电流曲线近似于正玄波,本文所设计的控制系统能够在不同负载情况下驱动无刷直流电动机动作,系统可靠性强、稳定性能好。
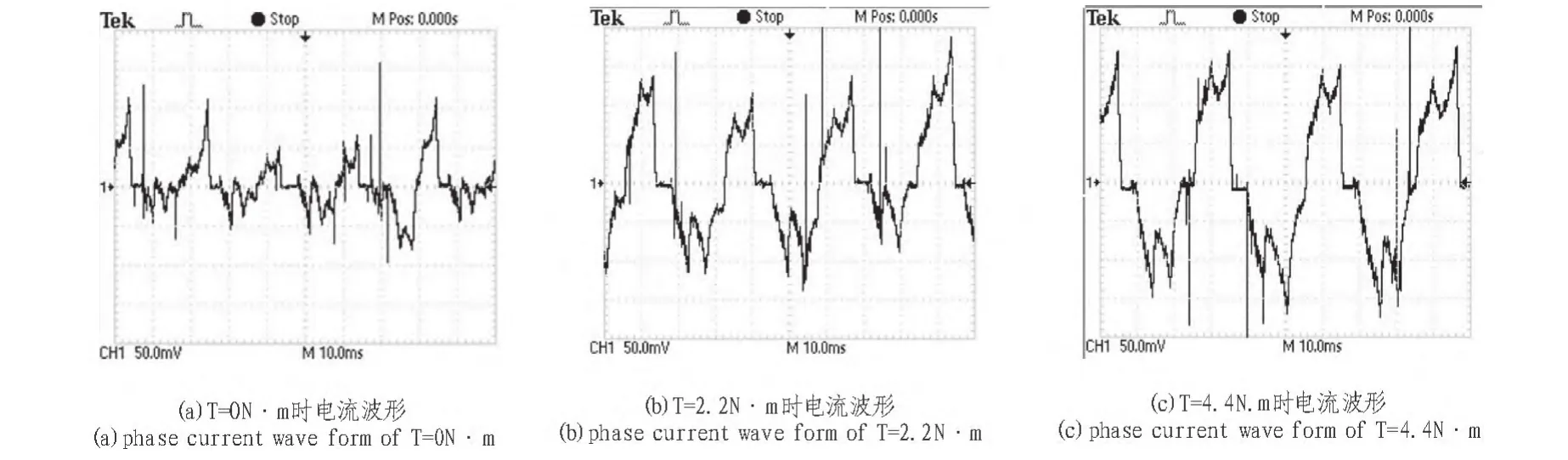
图9 相电流波形Fig. 9 Wave form of phase current
5 结 论
文中以PIC16F877A单片机为核心设计了无刷直流电动机控制系统,包括PIC16F877A最小系统、转子位置检测电路、IGBT驱动保护电路和系统信息反馈电路等,并编写控制系统软件流程。通过试验验证本文所设计的控制系统能够可靠驱动无刷直流电机可靠运行。
[1] 唐任远,现代永磁电机理论与设计[M].北京:机械工业出版社,2006.
[2] 刘刚,王志强,房建成.永磁无刷直流电机控制技术与应用[M].北京:机械业出版社,2008.
[3] 杨祖泉,姚绪梁,舒小芳.异步电动机直接转矩控制系统的仿真研究[J].电机与控制学报,2004,8(4):29-332.
YANG Zu-quan,YAO Xu-liang,Shu Xiao-fang, Rescarch on asynchronous motor direct self-control system[J].Electronic Machines and Control,2004,8(4):329-332.
[4] 赵海森,李志强,张健.自起动永磁电机初始状态对起动冲击电流和冲击转矩的影响[J].电机与控制应用,2010,(8):10-13.
ZHAO Hai-sen, LI Zhi-qiang, ZHANG Jian. influence of initial state on starting inrushing current and impact torque of line-start permanent magnet motor[J].Electric Machines& Control Application2010(8):10-13.
[5] 张忠蕾,李庆民,娄杰.电力电子控制电动机操动机构分闸运动特性的仿真分析[J].电网技术,2006,30(18):58-63.
ZHANG Zhong-lei,LI Qing-min,LOU Jie.Simulation and analysis on switching-off motion characteristic of permanentmagnet synchronous motor driven operating mechanism controlled by power converters for circuit breakers[J].Power System Technology,2006,30(18):58-63.
[6] 袁登科,陶生桂.一种感应电机直接转矩控制系统性能改善方案[J].中国电机工程学报,2005,25(8):151-155.
Yuan Deng-ke,Tao Sheng-gui.An improved scheme of the direct torque control system of induction motor[J].Proceedings of the CSEE.2005,25(8):151-155.
Base on PIC16F877A design control system for permanent magnet brushless DC motor
WANG Yu-kun1, DING Hai-bo2, YANG Hua-song1, XU Chen-lu1
( 1. Shenyang Research Institute of Coal Technology Engineering Group Corp, Fushun 113122, China; 2. Liaoning Medical Device Test Institute, Shenyang 110179, China)
With the development of science and technology, a higher demand of performance of brushless DC motor is raised. Based on the research of mathematical model and conduction mode of brushless DC motor, we designed hardware circuit and software program of control system using PIC16F877A as core, including, PIC16F877A smallest system,position detection circuit of rotor, the IGBT driver protection circuit and system feedback circuit, and the MPLAB software compiler platform was also used to write the control system. Through the analysis of the experimental results:we can see that the designed control system in this paper possesses both reliable properties and simple structures, which achieved reliable control of brushless DC motor.
PIC; permanent magnet brushless; motor; control system
TN06
A
1674-6236(2014)03-0146-04
2013–06–19 稿件编号:201306117
王宇鹍(1985—),男,内蒙古赤峰人,助理工程师。研究方向:煤矿电器设备检测与研究。