导弹拖车防碰撞系统设计
2014-09-21李成新赵鑫曾永钢
李成新, 赵鑫, 曾永钢
(中国人民解放军91004部队,辽宁大连 116031)
0 引言
导弹拖车是导弹储存、测试、转运、打靶过程中的主要载体,如何保证导弹运输过程中的安全,防止出现刮碰事故,是值得深入研究的课题。本文设计了一种基于 STC12单片机的导弹拖车防碰撞系统,运用单片机控制技术,超声波测量技术,无线通讯技术,语音播报技术,电磁及液压传动技术等,完成对导弹拖车周围障碍物的实时测距,即时语音播报,距离超限报警,自动刹车等功能。
1 防碰撞系统组成与工作原理
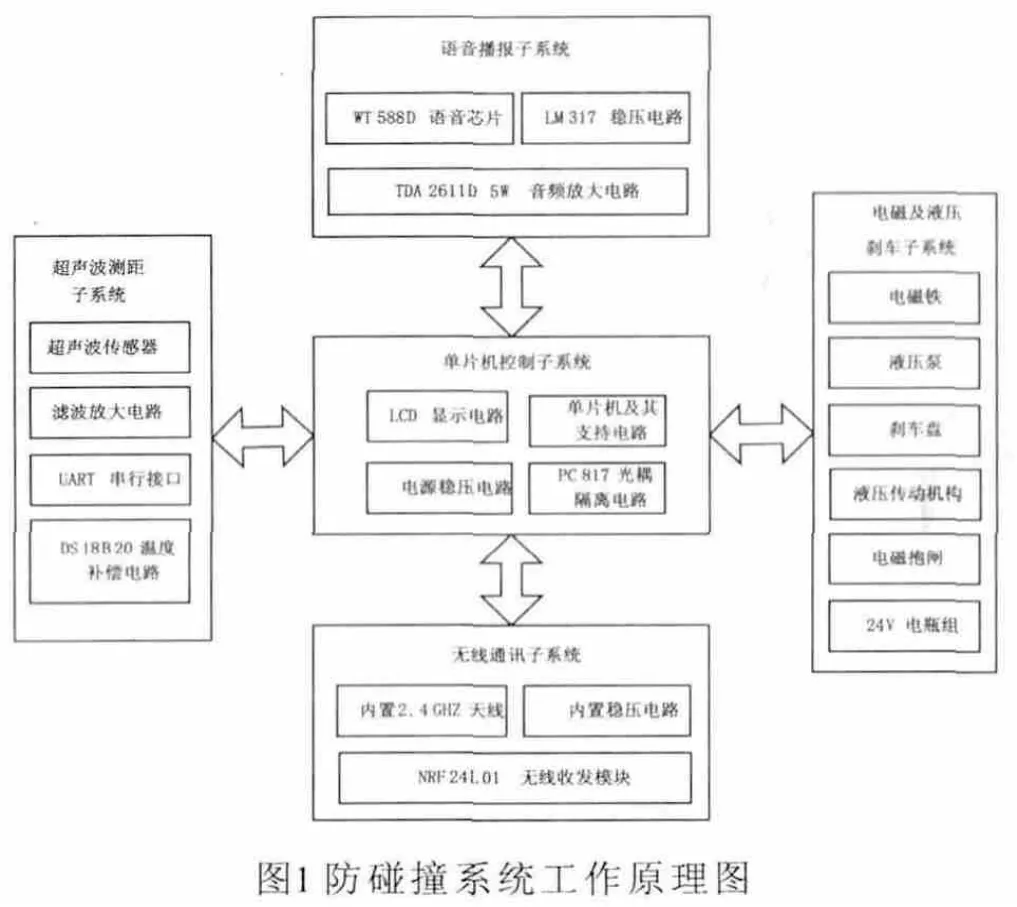
防碰撞系统由单片机控制子系统,超声波测距子系统,无线通讯子系统,语音播报子系统,电磁及液压刹车子系统组成。其中单片机控制子系统是防碰撞系统的核心,以 STC12单片机为CPU,主机和从机分别采用 48引脚STC12LE5A60S2和40引脚STC12C5A60S2芯片,两款芯片主要区别在于供电电压分别为3.3V和5 V,主机选用3.3 V供电电压芯片是因为5寸TFT触摸屏要求单片机引脚电压<3.3 V,从机I/O口采用5 V供电电压,通过串行接口向超声波传感器发送测距命令。防碰撞系统主从机软件基于Keil uV4集成编译环境,选择C语言编写[1]。
系统工作时,从机首先通过超声波测距子系统采集导弹拖车不同部位的距离信号,经由无线通讯子系统发送至主机,主机根据接收到的距离值判断是否启动语音播报子系统进行语音播报、距离超限报警,是否启动刹车子系统执行刹车操作。防碰撞系统工作原理如图1所示。
2 主从机硬件电路设计
主从机硬件均采用 STC12系列单片机作为CPU,主机硬件主要完成无线数据接收,液晶显示,驱动语音播报,驱动电磁及液压制动等功能。从机硬件主要完成超声波测距,无线数据发送等功能。
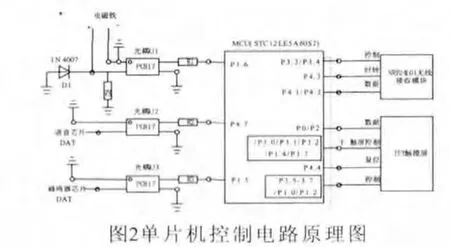
2.1 STC12单片机控制电路设计
单片机控制电路原理[1]如图2所示。2.2 无线通讯电路设计
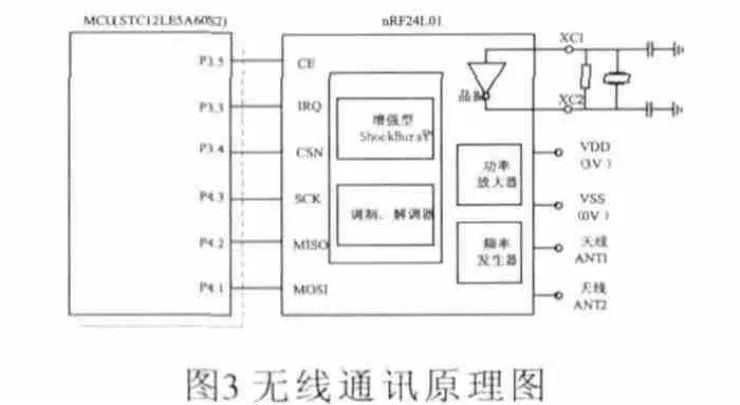
无线通讯芯片采用2.4 GHz世界通用ISM频段的单片高速(2 Mbps)无线收发模块nRF24L01[2,3],其内部电路包括频率发生器、增强型SchockBurstTM模式控制器、功率放大器、晶体振荡器、调制器、解调器等,外部接口包括ANT天线接口、SPI接口等,输出功率、频道、协议等参数通过SPI接口设置。防碰撞系统无线通讯电路原理如图3所示。
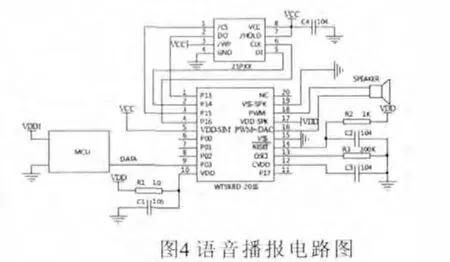
2.3 语音播报电路设计
语音播报和蜂鸣器报警采用 WT588D-20SS做为核心控制电路[4,5],外围电路包括SPI-FLASH、震荡电路、复位电路等。语音播报电路如图4所示。
2.4 超声波测距电路设计
超声波测距电路[6,7]采用两线收发一体防水型超声波传感器,数据处理采用STC12C5608AD单片机,具有软件测距校正,串口、IO口、脉冲三种不同数据输出接口,由单片机 P3.5输出 40 kHz方波给超声波电路,同时单片机定时器开始计时,超声波返回信号经过运放NE5532放大后输入单片机P3.3,单片机定时器停止计时,所得时间即为超声波往返于发射点与障碍物之间的时间(t),距离(S)计算公式:

式中:ν为声速,它和空气的温度有关,温度每升高l °C声速增加0.6 m/s,声速ν的计算公式为:

式中:ν= 331.45m/s,T为绝对温度。
3 电磁及液压刹车子系统设计
防碰撞系统通过驱动刹车子系统完成自动刹车功能[8],其制动原理是,当超声波测距达到刹车临界点时,由单片机发出控制信号,驱动电磁铁[9]迅速推动液压连杆,由连杆推动活塞挤压油路,迫使刹车片与刹车盘产生巨大摩擦力,完成拖车制动。电磁及液压刹车原理[10]如图5所示。
4 系统软件设计
4.1 系统软件总体设计
系统软件主要完成超声波测距计算、多机无线通讯数据传输、LCD数据显示、语音报警和自动刹车的控制等功能。系统流程图[1]如图6所示。
4.2 多机无线通讯软件设计
nRF24L01芯片工作在增强型SchockBurstTM模式,可实现1对6多机通讯,主机配置为接收模式,从机配置为发送模式。主从机都使用相同的频道,从机使用0到5不同的数据通道,每个数据通道拥有自己的地址,通过寄存器 EN_RXADDR来设置,主机一般使用 0通道。主机在确认收到数据后记录地址,并以此地址为目标地址发送应答信号,数据通道0被用做接收应答信号,因此数据通道0的接收地址要与发送端地址相同。增强型SchockBurstTM模式下的数据包描述为:1位前导码 + 3-5字节地址 +9位标志位 + 1-32字节数据 + 0/1/2字节CRC校验码。其中前导码用来检测0和1,只在发送模式下加入。
4.3 LCD显示软件设计
LCD使用5寸TFT触摸屏,防碰撞系统主界面在初始化时调用一次,实时测距值则在主函数中循环调用[1]。数字和汉字显示均采用字模提取软件提取,提取时采用字节倒序得到十六进制字模数组,字体对应点阵不超过 48×48,以字符串格式打印在屏幕上。
5 结论
导弹拖车防碰撞系统以超声波测距为依据,通过无线通讯传送数据,通过单片机控制显示、报警、自动刹车,具有测量精度高,安装简便,控制精确,实用性强等优点。项目来源于实际操作,并且在部队导弹转运等场合作了实际检验,军事和经济效益显著。

[1]高玉芹.单片机原理与应用及C51编程技术[M].北京:机械工业出版社,2011.
[2]时志云,盖建平,王代华等.新型高速无线射频器件nRF24L01及其应用[J].国外电子元器件,2007,8:42-44.
[3]王涛.基于nRF24L01 的2.4 GHz无线通信系统设计[J].无线电通信技术,2011,37(3):4-7.
[4]刘玉琼.基于WT588D语音提示系统设计[J].企业科技与发展,2010,22:99-102.
[5]仇成群,胡天云.基于超声波的防撞报警系统的设计 [J].制造业自动化, 2009,31(4):75-77.
[6]杨旭,刘小方,张泽奇等.基于单片机的超声波测距系统设计[J]. 机床与液压, 2011,39(8):106-108.
[7]李世军,周惠芳,金徐欢.基于单片机的超声波测距仪的研究与设计[J].湖南工程学院学报(自然科学版),2011,21(2):13-15.
[8]安定衡,孟博渊,杨世文.一种汽车自动刹车系统的研究[J]. 农业装备与车辆工程, 2009, 4:42-43.
[9]赵江辉,王淑红.一种比例电磁铁控制电路设计[J].工矿自动化,2011,37(181):74-75.
[10]王志云.液压盘式刹车装置可靠性分析[J].科技信息,2009,19:66-67.
