船舶半物理仿真电站监控及虚拟操纵的系统设计
2014-09-21林洪贵俞文胜
林洪贵, 俞文胜
(1. 华侨大学信息学院, 福建泉州362021;2. 集美大学轮机学院,福建厦门361021)
0 引言
我国目前是航运、海员大国,随着船舶大型化、自动化水平的不断提升,船舶用电量的大幅增加和电站构造的复杂化和多样化,这无疑对船舶电力系统可靠性、稳定性以及生命力的设计要求越来越高。为了确保船舶航行安全,作为船舶动力的核心,船舶电力系统应能在各种恶劣的海况和平稳工况下稳定可靠地运行,而且要研究、分析船舶电力系统在负荷冲击和故障情况下的种种过渡过程中产生的各种突变状况,这就需要一个平台来进行仿真研究,提出有效和切实可行的监控方法、手段和技术方案,并开发适应现代需求的网络远程操作的虚拟操作训练平台。目前对船舶电力系统仿真模拟系统主要采用以下两种,一种是利用全计算机虚拟仿真,一种是采用物理真实小电站。而本研究采用的是建立半物理仿真船舶电站,对电站特性影响特别大的柴油发电机组采用特殊控制(模拟柴油机的惯性和运行特性)的直流电动机-发电机组,而负载等则采取计算机仿真,这样的电站仿真模型,不仅可节约成本,降低真实电站的操作风险,也不存在实验误操作和故障损毁等风险,而且具有船舶柴油发电机组的惯性和真实运行特性以及操作和现场的真实感。
1 半物理电站仿真平台的组成
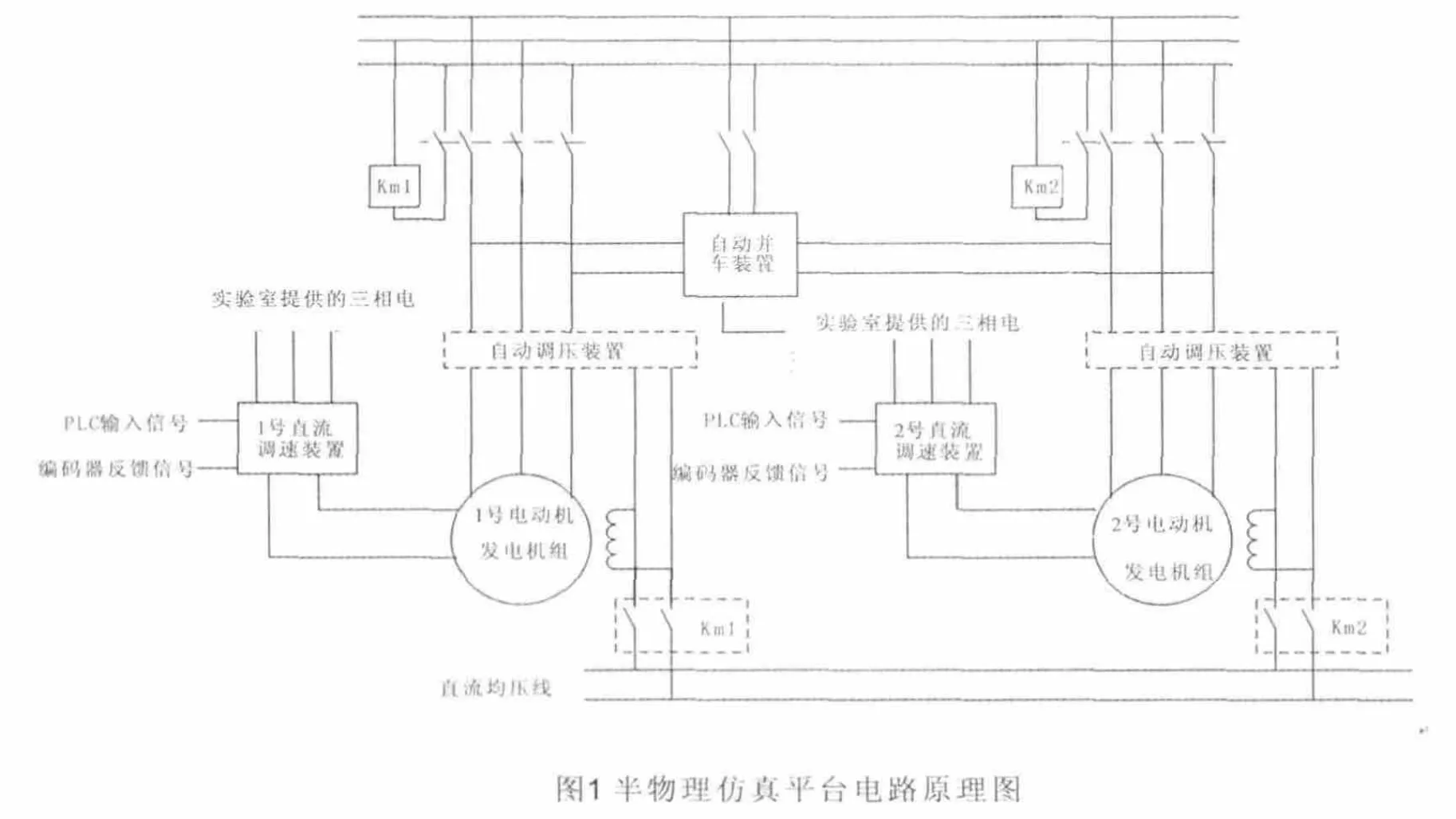
船舶半物理仿真电站是由直流电动机替代船舶的柴油原动机,构成直流电动机-发电机组向仿真的船舶电网供电[1]。半物理模型是建立具有柴油机惯性特征的船舶电站系统动态模型,采用智能算法控制(模拟柴油机特性)直流电动机替代柴油机,又有真实面板的主配电板,负载等在计算机上所做的虚拟仿真研究具有效果逼真、精度高、操作有沉浸感和现场体验感等优点。这样搭建的仿真电站方法耗资和使用成本都很低,而且还保证了仿真模型的广泛适应性和模型正确及准确性,本半物理仿真电站包含有原动机(可调载调速并具有惯性特征的直流电动机)、直流电动机控制装置、自动并联运行装置、输入输出模块,控制模块PLC以及上位计算机监控和虚拟操作仿真开发平台,建立了可与真实的船舶柴油发电机组相媲美的仿真测试平台及模拟运行环境,为船舶电站的监测、仿真实验、实验负载仿真与虚拟操作提供了良好可信赖的开发平台。其电路原理图如图1所示。
直流电动机(与柴油机在惯性方面差别很大,本设计我们在控制上应用了智能算法做了模拟仿真,由于篇幅所限不在本文介绍),且由于直流电动机的启动性能与调试性能好,调速范围大(可很好仿真柴油机的特性),被广泛应用于对调速要求很高的机械设备当中[2]。
本半物理电站的配电屏设有1,2号发电机调节控制屏两个,并车操作控制一屏,由于负载较少被较简化为半屏装设在并车屏的下半部分。实现半物理仿真电站的发电机组准备、启动停止、参数调整,并车、解列操作和负载增减等,并应用组态软件和网络技术相结合开发可用触摸屏来进行虚拟操作功能,并可用图表形式显示在配电屏运行和状态数据[3]。
智能控制的直流调速装置采用AB公司PLC模块,应用梯形图和公式等进行仿真编程,可对直流电机的速度、运行特性进行快速、可靠的控制,可灵活地设置控制方式和特性参数的随机调整,并且对直流电动机的运行参数和工作状态实施动态控制和实时监测,发现不正常以及故障等危险信号立即处理和报警等。发电机并车合闸要符合并车条件,该装置能自动检测和调整并车的三个实际并车条件,调整待并发电机组,使之满足要求,并能考虑主开关合闸的固有动作时间,在整步点提前一个时刻或相角发出合闸指令,进行自动并车操作[4]。根据电站控制流程,运用梯形图编写好电站控制程序下载到PLC模块,实现其监控功能[5]。
上位机监控与虚拟操作系统,即监控上位机机通过以太网与PLC实现通信联络,接收现场PLC发送来的数据、状态,并以图形或报表方式动态的将这些数据显示出来,也可对其发送控制和操作指令。实现远程监控、虚拟操作以及调整电站运行状态等功能。
2 仿真电站监控系统
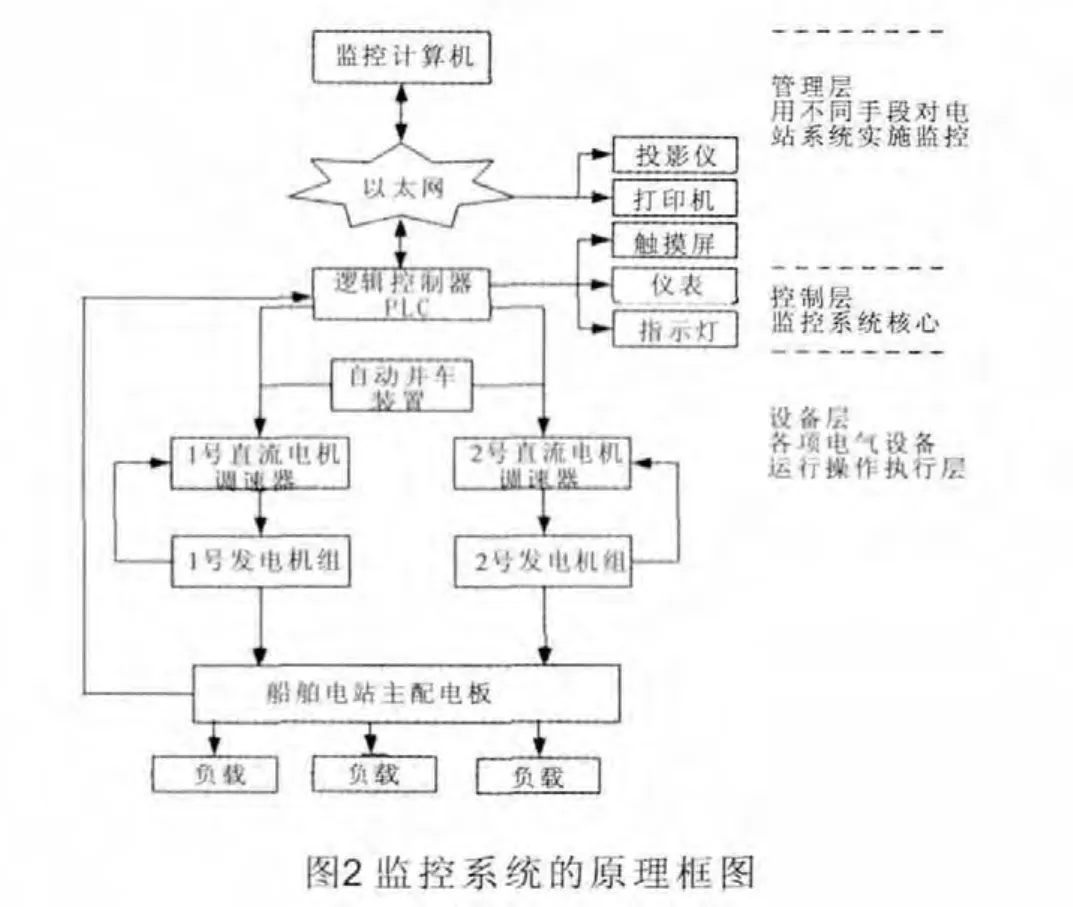
半物理仿真电站监控系统是将船舶综合电力系统中设备以各种真实或仿真虚拟器件,在实验平台上真实地展现和模拟船舶电站在各种运行状态下,体现出电站工作特征、参数变化、运行状态等的集中监控系统。包括船舶电站中电能的产生、输送、分配、变换、控制、检测等,以实现电力系统的起动发电、输配电、变换、负载增减、远程监控、故障检测报警等功能。通过对这个平台的研究,可验证各种船舶电站能够长期有效、稳定运行的电站结构、优化监控策略和参数的匹配以及设备的选用等。半物理仿真电站的监控系统框架如图2所示。
监控系统的PLC结构:可分为管理层、控制层和设备层这三层内部结构。
管理层是监控系统的最上层,即上位机,其借助以太网与控制层的PLC通讯得到电力系统运行状态、参数,根据现场情况对监控模块进行选择息,实现对电站的监控。以及对系统的不正常和故障状况进行报警,显示和打印等功能。
控制层是数据采集和电站控制的具体实现层,为系统直接功能控制主站。采用的是美国AB公司的PLC控制模块,负责对船舶电站进行自动监控和虚拟操作。数据采用现场总线与设备层的控制PLC模块连接,采集如电网各节点的电压和频率,发电机组的三相电流、有功功率和功率因数等运行、状态数据。经与设备层的自动并车、并联装置,可负责两台发电机组进行并车联网解列等操作。然后对电站的故障等进行报警和相应的故障处理等程序,如机组超速自动停车等。
设备层的控制器是系统的底层,即系统从站,由智能直流调速控制装置和并车联网装置等构成,直流电机调速智能控制装置可实现以下功能:发电机组的选用、延时、启动、停止、应急停车、增减速度、调频调载和根据柴油机的运行特性、惯性、状态变化的特征来控制,并车联网装置控制发电机主开关的合闸(或同步)、解列分断和机组增减等功能。实现对船舶电站的状况、调用、运行参数的采集、检测和控制等。
3 仿真电站虚拟操作系统
为了弥补半物理仿傎电站在学员训练操作台套数和某些功能上的不足,同时解决船员、学员不受教学训练场地和训练时间的限制,虚拟操作船舶电站是必要的。本设计是以组态软件和网络技术相结合,综合地应用到船舶电站虚拟仿真操作程序开发上,选择了界面友好、有开发经验的PIMS组态软件为虚拟操作开发环境,建立以软件SQL Server 2008开发的数据库系统,以此为船舶电站的虚拟操作仿真平台。
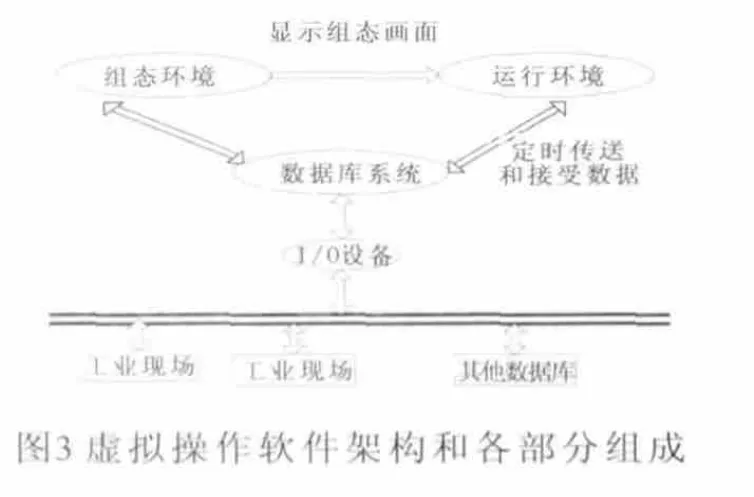
组态软件是以计算机智能化为核心的自动控制集成,可图型化、菜单式进行操作的软件系统。是现在普遍采用对现场数据采集与过程控制的专用软件工具,是系统上位机的软件平台和虚拟仿真的开发环境[7,8]。组态软件主要分为实现功能和开发使用两大部分:组态开发环境和组态运行环境[9]。运用该软件提供的模块、功能程序和用户扩展程序等程序开发,功能设置要在组态开发环境下进行设置、定义。仿真电站的运行环境编程成独立运行的程序段,并进行操作和功能的关联,各设备运行具有现场的动画效果,所开发的虚拟电站具有现场操作感和友好人机界面的仿真电站,实现了在触摸屏上通过以太网远程对船舶电站实际操作。该虚拟操作软件架构和各部分组成如图3所示。
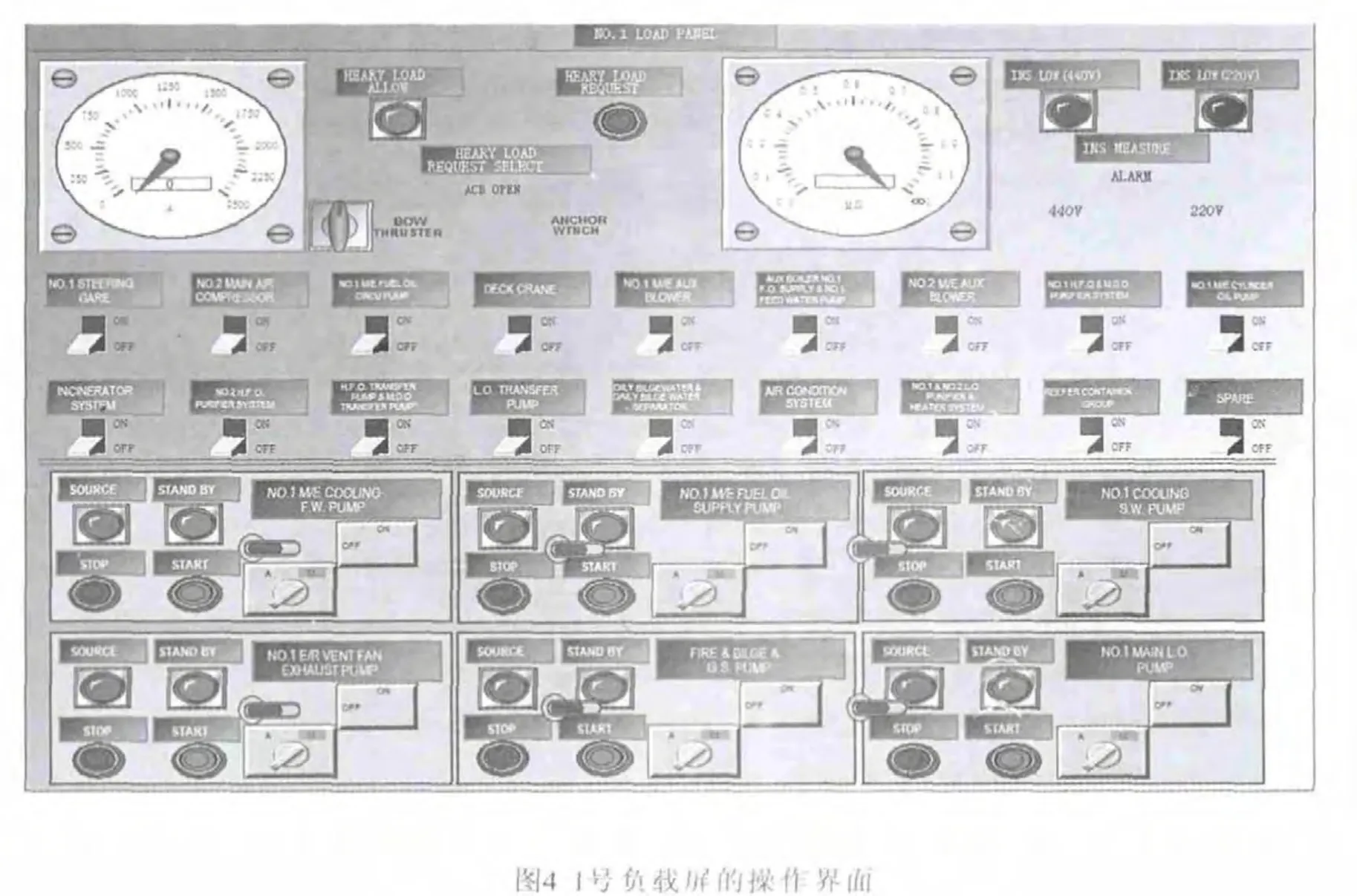
本设计运用PIMS的开发平台,结合实船电站尤其是配电板的外观特点,以尽可能与实物相一致的图画开发设置其界面。PIMS提供了功能强大的图库、绘图工具等便于开发,通过对图标的优化,设置的界面符合船舶轮机工作人员视觉和操作习惯。例如1号负载屏的操作界面(举例)如图4所示。界面的设置是虚拟操作的要点。
虚拟操作界面按以下原则设计:
1)为给轮机工作人员能够直观、详细了解配电板的结构,一个窗口只设置一个操作屏,不同的控制屏可以通过鼠标进行切换;2)以实际的船舶电站操作习惯设置相关配电板操作界面;3)配电板外形尺寸与实际船舶电站相一致,视觉上具有真实感和现场体验,让船员、学员有直接在船舶电站上真实操作的沉浸感和亲身体验。
船舶电站可进行的虚拟操作:
1)发电机组的手动起动、手动合闸、手动分闸以及手动停机等;2)发电机组手动准同步并车、手动负荷转移、手动解列和手动停机等;3)发电机组自动起动、自动准同步并车、自动负荷转移、自动解列和自动停机等;4)大负荷启动询问功能;5)分级卸载、分级自动启动;6)风油紧急切断、报警;7)岸电实验;8)应急发电机手动启动、手动停机以及试验合闸;9)应急发电机自动起动、合闸和停机。
4 仿真电站可完成的主要功能
基于现实发电及控制设备的半物理仿真电站,对比全计算机模拟仿真,可以更接近于真实的船舶电站。本半物理仿真电站目前可实现的功能有如下几个方面[6]:电站的基本操作:如启动、停止、并车合闸、调频调载、重载询问、分级卸载、电压和无功调整等功能。以及数据库基本功能如数据采集、显示、记录、报警和查询等。
电站管理功能:设置电站的功率管理功能,可以以此平台设置电网的功率裕量和轻载标准,评判解列、并联所应设置合理的条件和标准。
5 结论
船舶半物理仿真电站的监控与虚拟操作是一个非常复杂的系统,涉及到船舶电站仿真、监控、虚拟操作等硬件与软件诸多方面,需要运用到数据采集与传输、电气控制、软件编程、动画设置、数据库等方面的知识。本文建立以智能控制的直流电动机做原动机,来仿真船舶柴油发电机组特性的船舶电站仿真平台,在该平台上建立实时的电站监控,有配电板的监控、电站两个发电机组的运行状态、参数监控、电网各项数据的监控和动态报表、以及虚拟操作等等。但毕竟不是真正意义的船舶真实电站,其所得到的监控数据和虚拟操作不能完全替代真实船舶电站,需要继续不断研究、修改,解决它们之间的差异性和真实感等问题,进一步完善、提高电站模型的真实度。
[1]张海涛,哈建林. 船舶自动化发展趋势[J]. 中国水运,2006, 4(5):10-12.
[2]徐倩倩. 电站自动化系统在变电站中的应用[J]. 现代建筑电气篇, 2008, 2:52-55.
[3]王春. 基于组态软件的 PLC实验教学系统[D].西华大学, 2009.
[4]林威汉, 高春光, 张海涛. 国内组态软件的现状与未来[J]. 电气时代, 2002, (6):9-12.
[5]Ikeda, M. Hiyama,T. Simulation studies of the transients of squirrel cage induetion motors .IEEE Transactionson Energy Conversion, 2007,22(2):233-239.
[6]张舟云, 沈祥林, 罗晓峥. 内燃机车起动过程中应用超大电容的仿真研究[J]. 铁道学报, 2002,24(4):117-120.
[7]王刚. 船舶电站系统建模与人机界面设计[D]. 大连海事大学, 2006.
