提高他励式磁控电抗器响应速度的方法
2014-09-20刘海鹏尹忠东李和明曹松伟
刘海鹏,尹忠东,李和明,曹松伟
(1.华北电力大学 新能源电力系统国家重点实验室,北京 102206;2.昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
0 引言
根据我国的国情,发展大电网互联和大容量远距离输电是必然趋势[1-2],近年来,超高压、特高压电网在我国很多地区相继投入运行[3]。超高压或特高压大电网的形成及负荷变化加剧,要求大量可调的无功功率源调整电压,维持系统无功潮流平衡,减少损耗,从而提高供电可靠性[4-5]。而且为了适应负载的急剧快速变化,无功功率源还应该具有高速响应的特点。
目前应用广泛的动态无功补偿装置是晶闸管控制电抗器(TCR)和晶闸管投切电容器(TSC)[6-7]。由于TCR采用相控模式,因此会产生严重的谐波问题[8],并且其与 TSC 都存在着结构复杂[9]、维护费用高、应用在高压场合可靠性差等缺点[10]。
基于他励式磁控电抗器(SMCR)的新型动态无功补偿装置,是一种特殊的超高压或特高压并联电抗器[11-13],它能够随着传输功率的变化而自动平滑地调节自身的容量。SMCR以控制策略简单易行和可靠性高的优点,在电力系统超/特高压领域有着广阔的应用前景[14],但其响应速度慢的特点在一定程度上限制了其广泛应用[15]。
本文首先分析了SMCR的工作原理及影响其响应速度的本质原因。针对这一原因,通过合理地配置SMCR铁芯上的工作绕组和控制绕组结构,消除影响SMCR响应速度的不利因素,有效提高其响应速度。并可验证,在额定电压下,此改进方法不会影响SMCR的容量。实验验证结果表明本文理论分析的正确性,提出的绕组结构可以极大地提高SMCR的响应速度。
1 SMCR的结构及工作原理
超/特高压SMCR由于容量大,本体通常为三相电抗器组。为便于叙述,本文以其中一相为例进行分析。SMCR中的每一相由2个等截面、等长度的主铁芯和一个等长度的旁轭组成,旁轭截面大于主铁芯截面。每个主铁芯上绕有工作绕组(也称一次绕组)和控制绕组(也称二次绕组)。单相SMCR的一次接线如图1所示。图中,C1、C2为主铁芯,C3为旁轭;L1、L2为电抗器的工作绕组,L1、L2上下两端分别并联连接后接入电力系统;L5、L6分别为电抗器的控制绕组,L5、L6下端串联后,上端接入整流器的输出端[16];工作电源为工频交流电源。

图1 SMCR结构Fig.1 Structure of SMCR
SMCR的基本工作原理是:L5和L6接入如图所示的直流电压后在主铁芯C1、C2中产生方向相反的磁通,其中L5在C1中产生的磁通方向向下,L6在C2中产生的磁通方向向上。当工作电压在正半周期时,交流电压在C1中产生的磁通与直流电压产生的磁通方向相反,在C2中产生的磁通与直流电压产生的磁通方向相同,因此C2便可进入饱和状态,C1未饱和。此时,绕组L2的电抗减小,便有感性电流产生,注入系统补偿无功。当工作电源在负半周期时,交流电压在C1中产生的磁通与直流电压产生的磁通方向相同,在C2中产生的磁通与直流电压产生的磁通方向相反,因此C2未饱和,C1进入饱和状态。此时,绕组L1的电抗减小,便有感性电流产生,注入系统补偿无功。这样,一个工频周期内C1、C2轮流饱和,便可向系统注入感性无功,起到无功补偿的作用。
2 影响SMCR响应速度的机理
SMCR等效电路见图2,各铁芯同名端用*号标出。
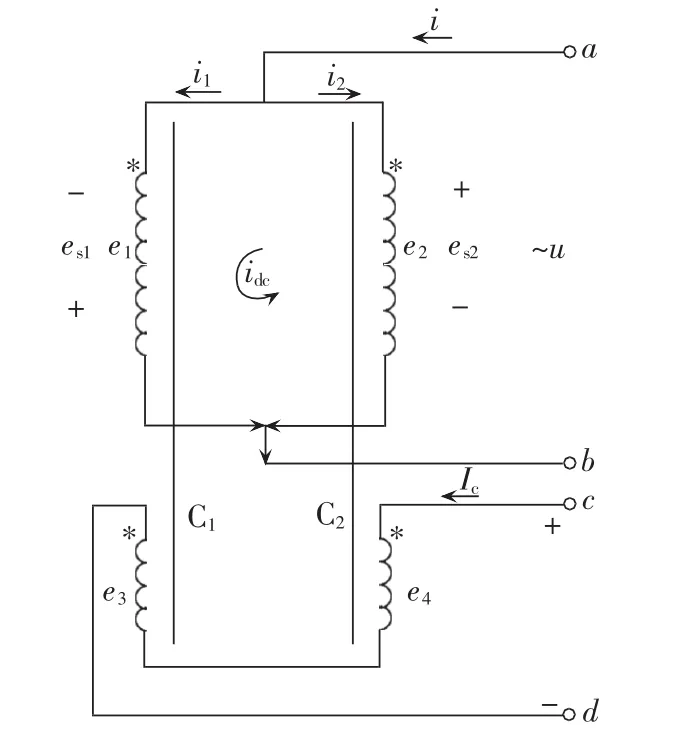
图2 SMCR等效电路Fig.2 Equivalent circuit of SMCR
当系统需要补偿无功时,SMCR的控制系统会根据实际需要计算出控制直流电压值。控制直流电压加在控制绕组两端时,便会在控制绕组中产生控制电流Ic,在控制电流由零向稳定状态变化过程中,会在2个主铁芯的工作绕组与控制绕组中产生感应电动势。设控制电流Ic的方向从c端进入,则控制电流Ic的变化首先在工作绕组中产生感应电动势 es1、es2,其中,es2方向为上正下负,es1方向为上负下正。es1、es2的大小可用式(1)表示。

其中,N1为工作绕组匝数;为控制绕组匝数;S为主铁芯截面积;μ为铁芯磁导率;l为磁路的长度。es1、es2在两工作绕组形成的回路中方向相反,便会产生环流idc,其方向如图2所示。当工作电压为正半周期时,C2饱和,饱和电流i2方向自上而下,与环流idc方向相反,这阻碍了i2快速达到稳定状态;当工作电压在负半周期时,C1饱和,饱和电流i1方向自下而上,与环流idc方向相反,这也阻碍了i1快速达到稳定状态。当直流控制电流Ic达到稳定状态后,虽然此时 es1、es2等于 0,但当环流idc逐渐减小时,在工作绕组回路中会产生阻止idc减小的感应电动势,使idc不能迅速降为0。基于此,即使控制电流Ic已经进入稳定状态,工作电流仍然要持续一段时间才能进入稳态,此为影响SMCR响应速度的主要因素。其次,控制电流Ic从零开始逐渐增大时,控制绕组会产生感应电动势阻止其变化,由于控制绕组匝数很少,因此感应电动势很小,其对SMCR响应速度的影响远远小于工作绕组并联所造成的影响。但是,控制绕组中感应电动势的形成,使SMCR的控制电流不能瞬间达到稳定值,此为影响SMCR响应速度的次要因素。
图2中e1、e2为交流工作电压产生的感应电动势,当工作电压处于正半周期时,e1、e2方向均为上正下负,当工作电压处于负半周期时,e1、e2方向均为上负下正。2种工作状态下e1、e2均大小相等、方向相同,因此在工作绕组形成的回路中不产生环流,对工作电流的响应速度没有影响。
当SMCR工作于稳定状态后,工作电流处于正半周期时,分支电流i1、i2可表示为:

工作电流处于负半周期时,分支电流i1、i2可表示为:

则总电流i可表示为:

其中,u为交流工作电压;μs为饱和磁导率。
并且,当SMCR工作于稳定状态后,由于工作电压的周期性交变,会在控制绕组中产生感应电动势 e3、e4。 设 μ1和 μ2为同一时刻 C1和 C2中的磁导率,则可得:

此时,控制绕组中控制电流表达式为:

其中,UD为直流电压值。由式(7)可见,控制绕组电流并不是纯直流电流,而是叠加了交流分量的直流电流。
3 SMCR响应速度改善措施
通过上述对影响SMCR响应速度本质机理的分析,本文提出了如图3所示的改进电路结构。
改进电路将图1中原工作绕组L1分为匝数相等的2个绕组L1和L3,原工作绕组L2分为匝数相等的2个绕组L2和L4。并且为了让直流控制电压能更平衡均匀地作用于工作绕组,把控制绕组L5、L6移至2个主铁芯的中部。工作绕组L1、L2位于主铁芯的上部串联连接,L3、L4位于主铁芯的下部串联连接。并且绕组L1下端与L3的下端相连,然后接入电力系统的一端;L2的上端与L4的上端相连,接入电力系统的另一端。改进后的等效电路如图4所示。
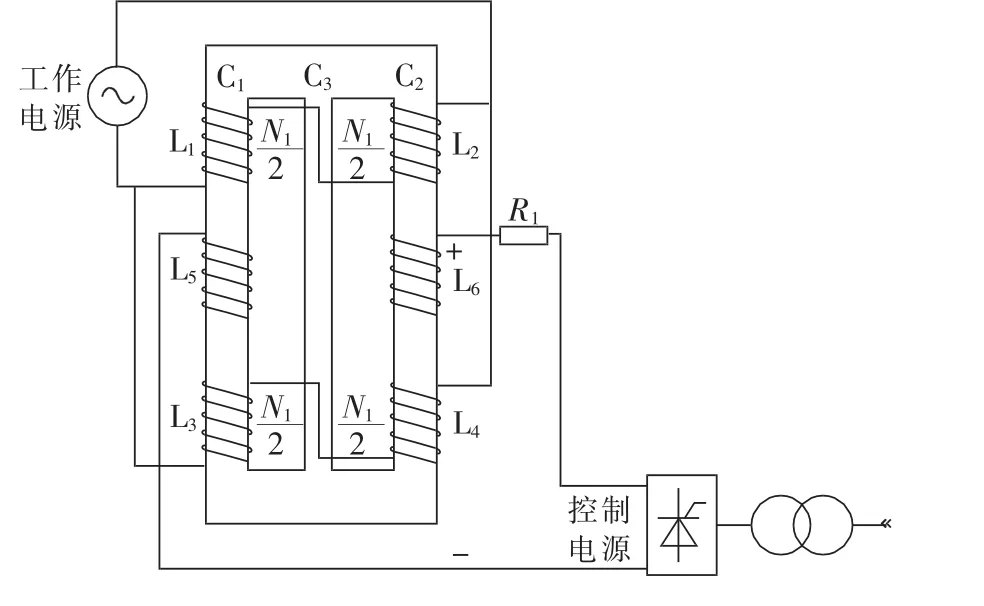
图3 SMCR改进电路结构Fig.3 Improved circuit of SMCR

图4 SMCR改进电路的等效电路Fig.4 Equivalent circuit of improved SMCR
3.1 改进电路的工作原理
改进后电路的基本工作原理是:直流控制绕组中通入如图4中所示直流电流后会在两主铁芯中产生方向相反的直流磁通,其中,在C1中产生的直流磁通方向向下,在C2中产生的直流磁通方向向上。工作电压为工频交流电压,当工作电压处于正半周期时,在C2中产生的磁通与直流控制电流产生的磁通方向相同,因此C2便可进入饱和状态,饱和后铁芯的磁导率很小。SMCR绕组的电感值如式(8)所示,其中,N为绕组匝数。

由式(8)可知,在此瞬间,C2上工作绕组的感抗变得极小,分压极小,工作电压几乎全部加在了C1的工作绕组上,此时,即使C1的工作绕组上工作电流产生的磁通同控制绕组产生的磁通方向相反,工作电压也大到足以使C1饱和。因此,C1和C2同时进入饱和状态,只是饱和程度不同。当工作电压处于负半周期时,工作原理同上。
以图4为例,从数学角度进行定量分析。假设每个工作绕组的匝数为N1/2,每个控制绕组的匝数为ND/2。当交流工作电压处于正半周期时,C1的磁感应强度为 B1、饱和磁导率为 μs1,C2的磁感应强度为 B2、饱和磁导率为 μs2;u′D为直流控制电压,R1为控制绕组中的限流电阻,u为交流工作电压,可得如下各表达式:

通过联立式(9)—(14)可以求出 SMCR的工作电流i的表达式为:

当工作电压在负半周期时,也可用类似的方式求解。
3.2 改进电路提高工作电流响应速度的机理
图4中,对于交流工作电压在4个工作绕组上产生的感应电动势 e1、e2、e3、e4,当工作电压处于正半周期时,e1、e2、e3、e4均为上正下负,当工作电压处于负半周期时,e1、e2、e3、e4均为上负下正。 2 种工作状态下,绕组 L1、L2、L3、L4形成的回路中 e1、e2、e3、e4均互相抵消,不会产生回路环流,仍然不会对工作电流的响应速度产生影响。
当需要进行无功补偿,控制电压加于控制绕组上时,产生控制电流Ic,电流Ic从0上升到稳态的暂态过程会在工作绕组 L1、L2、L3、L4中分别产生感应电动势 es1、es2、es3、es4,方向如图 4 中所示。 es1、es2、es3、es4的大小可用式(16)表示为:

则在由 L1、L2、L3、L4组成的工作绕组回路中,直流感应电动势es1与es2、es3与es4大小相等、方向相反。因此便有es1+es2+es3+es4=0,因此在整个工作绕组回路中不存在影响工作电流i响应速度的直流环流,即不会影响工作电流的建立速度。此时,只要控制电流达到稳定状态,工作电流也即进入相应的稳定状态。
通过上述分析可知,控制绕组自身所产生的感应电动势对控制电流的阻碍作用成为了影响SMCR响应速度的唯一因素。在此基础上,采取的相应的技术措施笔者已在文献[14]中介绍,这些措施使控制电流在一个工频周期内达到稳定值,则工作电流的响应时间就可以在20 ms以内。
图 4 中,工作绕组 L1、L2、L3、L4的匝数都为原工作绕组匝数的一半,并且工作绕组L3、L4串联后和串联后的L1、L2进行并联。两铁芯饱和后磁导率虽不同,但差别不大,假设两磁导率相同,均为μ,可得:

式(18)得到的电流大小与式(4)相同。因此,同样的交流工作电压下,输出的总工作电流和普通并联电抗器输出工作电流相同,不会因为绕组的串联连接而变小。
同样,同式(5)和式(6)的原理可知,改变工作绕组结构后,控制绕组电流也不是纯直流电流,而是叠加了交流分量的直流电流。只是由于绕组结构的变化,引起控制绕组中感应电压的不同,使控制电流中的交流分量大小不同,但均不会对工作绕组的正常工作产生影响,并且,可以通过减小控制绕组的匝数来降低控制电流中的交流分量。
4 实验结果验证
基于额定值为380 V/12 A的SMCR进行了相关的实验。实验选择的工作电压有效值为200 V,控制电压为直流15 V,控制回路电阻选择10 Ω。将电抗器工作绕组在相同的电压条件下分别并联连接和串并连接,得到的工作电流波形如图5、6所示。从图5、6中可见,在工作绕组的2种接法下,磁控电抗器输出工作电流大小相同,即其工作状态完全一致。

图5 传统SMCR工作电流Fig.5 Working currents of traditional SMCR

图6 改进SMCR工作电流Fig.6 Working currents of improved SMCR
磁控电抗器串并连接时,支路电流i1、i2波形如图7所示。

图7 改进SMCR两支路电流Fig.7 Branch currents of improved SMCR
在200 V交流电压正常工作条件下,加入励磁控制电压,工作绕组并联连接和串并连接的波形分别如图8、9所示。从图8中可见,工作绕组并联连接时,当控制电流达到稳定状态后,工作电流由于环流的影响仍然要经历约1.4 s的时间才能达到稳定状态。图9中,由于工作绕组改为了串并连接,当控制电流达到稳定状态时,工作电流也即进入稳定状态,此时,工作电流从开始到稳定只需经历约7个工频周期(约为0.14 s),极大地提高了SMCR的响应速度。
图10、11分别为工作绕组接为并联连接和串并连接时SMCR的退磁波形。从图10中可见,并联连接时由于环流的存在严重影响了磁控电抗器的退磁速度;而由图11可见,当控制绕组改为串并连接后,即不存在上述现象,退磁速度大幅加快。

图8 传统SMCR励磁波形Fig.8 Excitation waveforms of traditional SMCR

图9 改进SMCR励磁波形Fig.9 Excitation waveforms of improved SMCR

图10 传统SMCR退磁波形Fig.10 Demagnetization waveforms of traditional SMCR

图11 改进SMCR退磁波形Fig.11 Demagnetization waveforms of improved SMCR
5 结论
将现有的SMCR工作绕组由并联连接改为串并连接,极大地提高了SMCR的响应速度。并且,在同样的交流工作电压下,SMCR的输出总工作电流和普通并联电抗器输出工作电流相同,不会因为绕组连接方式的改变而减小。在此基础上,通过适当的方法可以使SMCR的励磁速度和退磁速度都缩短到一个工频周期内。这样,SMCR便可应用于电力系统中工况急剧快速变化的情况下,如波动和闪变,为其在电力系统中的应用奠定了良好基础。
