基于MATLAB的U型滑道约束式输送链补偿轨迹的实现
2014-09-19天津理工大学机械工程学院天津300384天津商业大学机械工程学院天津300134
(1.天津理工大学机械工程学院,天津 300384;2.天津商业大学机械工程学院,天津 300134)
(1.天津理工大学机械工程学院,天津 300384;2.天津商业大学机械工程学院,天津 300134)
针对一种特殊工况下的低速重载输送链——U型滑道输送链,分析了输送链在一个周期内传递动力过程中的多边形效应问题,对销轴的运动轨迹进行了实时位置补偿,减轻多边形效应的影响。利用MATLAB软件计算并得出补偿轨迹曲线,使得输送链在既定的轨迹上连续平稳传动。并为类似的轨道约束式链传动提供了理论依据和参考。
多边形效应;约束式链传动;补偿轨迹;MATLAB
0 前言
链传动因其经济可靠而广泛应用于运输、采矿、冶金、军事等各种机械的传动系统中[1]。但是由于链传动多边形效应的存在,链条的线速度呈现周期性变化,链条也出现或松或紧的现象,使链传动的稳定性受到很大的影响[2]。仅用作传递动力的链传动一般都留有一个松边,承担多边形效应产生的问题。用于低速重载的链传动,因为每个链节上的负载都很大,重力会产生大的拉应力,所以不允许有松边[3]。针对在特殊工况下工作的输送链,建立U型滑道约束式输送链模型,通过对输送链加以约束以及对多边形效应进行实时轨迹补偿,以实现输送链的连续平稳运行。
1 建立U型滑道约束式输送链模型
根据输送链空间位置、机构之间的干涉问题以及低速重载等工况要求,本文设计了一种U型滑道约束式输送机构,在有限的空间内携带更大的负载,该机构的轨迹形状是由四个相切的圆弧组成。如图1所示。
设驱动圆圆弧半径为R0,每π/2放置一个销轴,则
式中,L为链节长度。
图1 U型滑道约束式输送链轨迹参数Fig.1Parameter of constrained conveyor trajectory with U-type slide
链节在上轨迹和下轨迹所占的圆心角分别为

下轨迹圆弧与左右两驱动圆圆弧相切,且上下轨迹圆弧不同心,偏心距为b,下轨迹圆弧和驱动圆的切点与驱动圆圆心之间的夹角为ξ。销轴在过渡区域的位置几何关系数学模型如图2所示。
图2 过渡区域内销轴的位置几何关系Fig.2Geometric relationship of pin position in transition region
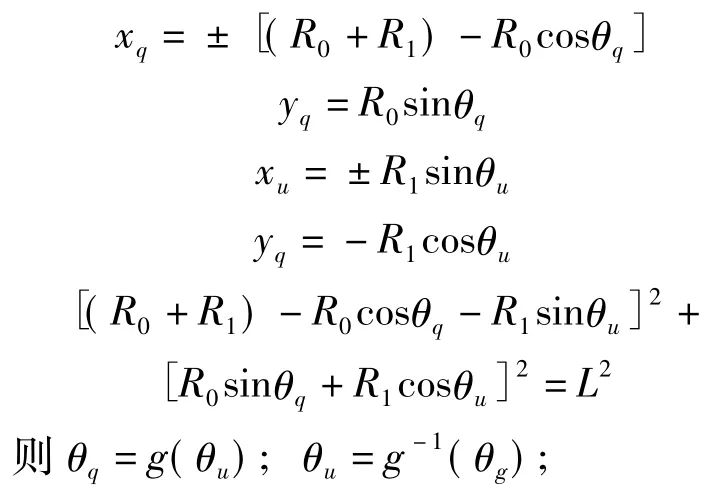
1.1 驱动圆的销轴与下轨迹的销轴位置关系
设以驱动圆和上轨迹的交点作为起始点,在驱动圆上形成角度θq;下轨迹销轴和Y轴负半轴之间的角度是θd(θq和θd是角度的绝对值)。
1.2 驱动圆的销轴与上轨迹的销轴位置关系
驱动圆销轴和上轨迹销轴的位置关系为
2 驱动销轴的运动位置分析
为了保证输送链在一个周期内的任何位置都不产生拉伸和压缩的趋势,使下轨道半径实时增大或减小以实现输送链的连续传动。销轴P1处于不同的位置,对应于不同的下轨迹半径。假设当销轴P1的角度为θ1=θ1m,下轨迹半径R2最大,可以实现连续运动,但θ1≠θ1m时,输送链产生拉伸或压缩现象,不能实现链条的连续传动,需要在一个不影响空间的位置开一个凹进或凸出的槽,以容纳压缩过程中的余量,为简化计算选在销轴P14处,容纳压缩余量的槽方向向下。
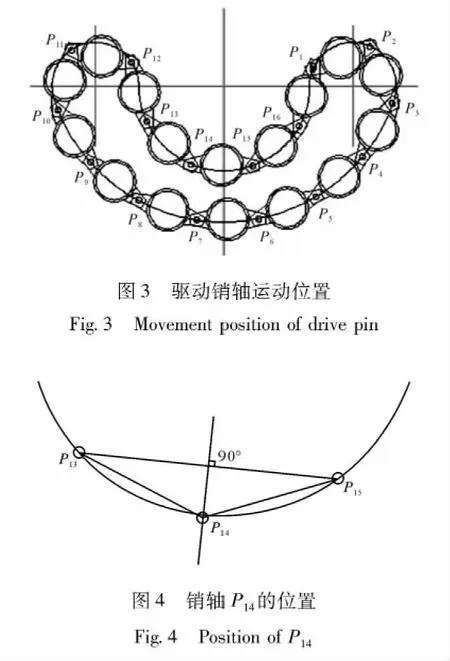
当销轴P1处于图3的位置时,可依次确定其他各个销轴的位置,分析如下:
(1)销轴P1的角度为θ1。
(2)从销轴P2开始有:(a)当θ1≤π/2+ξ时,θ2=θ1+π/2,θ3=-f-1(θ2);(b)当θ1>π/2+ξ时,θ2=-f-1(θ1),θ3=θ2+δd。
(3)为了布满16个链节,下轨迹在销轴P3之后应该至少还有5个链节,所以直到销轴P9才有可能处于下轨迹与驱动圆的切点位置。销轴P4~P8的角度θi=θ3+(i-3)δd,i=3~8。
(4)销轴P9、P10有两种情况:(a)当θ8≤α -δd时,θ9=θ8+δd,θ10=f(θ9);(b)当θ8>α -δd时,θ9=f(θ8),θ10=θ9-π/2。
(5)销轴P11、P12有两种情况:(a)当θ10≥π/2时,θ11=θ10-π/2,θ12=g-1(θ11);(b)当θ10<π/2时,θ11=g-1(θ10),θ12=θ11-π/2。
(6)销轴P16的角度:(a)当θ1≥π/2时,θ16=θ1-π/2,θ15=-g-1(θ16);(b)当θ1<π/2时,θ16=-g-1(θ1),θ15=θ16+δu。
销轴P13和销轴P15之间的角度为θ13-15=θ13-θ15。因为销轴P13和销轴P15间的角度要小于一个链节在上轨迹上所占的圆心角,即θ13-15<δu,所以销轴P14不会在上轨迹的圆弧上运动,而在销轴P13和销轴P15连线的垂直平分线上,如图4所示。
3 补偿轨迹生成
设定主要参数:L=131 mm;R0=92.63 mm;R1=181.78 mm;R2=381.50 mm;b= 90.22 mm;ξ=18.2°;α=71.8°。
设销轴P13、P14和P15的坐标分别为(x13,y13)、(x14,y14)、(x15,y15)。考虑销轴P13和P15都在上轨迹上,所以有

由于销轴P14到销轴P13和P15的距离相等(均为L),则有

可以解出(x14,y14),有两个解,一个位于销轴P13和销轴P15连线的上面,一个位于连线下面,舍去上面的值,位于连线下面的值就是(x14,y14)的解。
销轴P1的位置角度θ1是决定整个链条运动位置的变量,改变销轴P1的位置角度可以得到销轴P13及P15的位置角,进而可以得到销轴P14的坐标点,销轴P14的轨迹即是补偿轨迹。销轴P1的运动周期是M2,每次将θ1增加1°可以采集到销轴P14的所有坐标点。销轴P14共有90个坐标点,本文只列出其中采集到的10个离散坐标点,如表1所示。
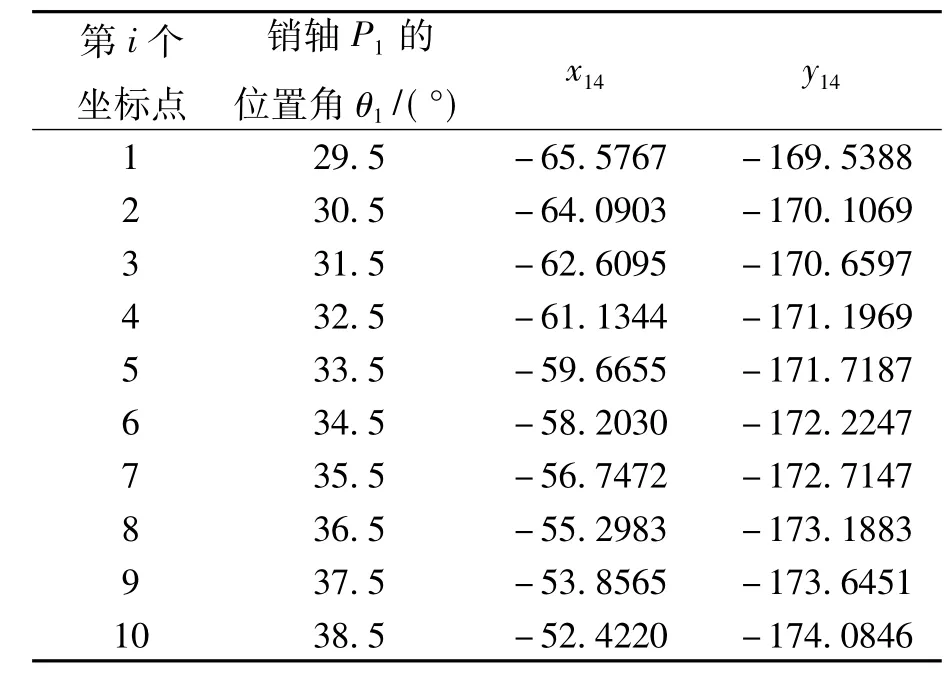
表1 销轴P14的坐标点采集Tab.1Collecting coordinate points of P14
对采集到的90个销轴P14的离散坐标点,在MATLAB中运用polyfit函数对其进行多项式拟合,得到拟合曲线的方程为

销轴P14的运动轨迹结合其他各个销轴的运动轨迹,即是U型滑道约束式输送链的运动轨迹,如图5所示,图中曲线a为补偿轨迹(销轴P14运动轨迹)。
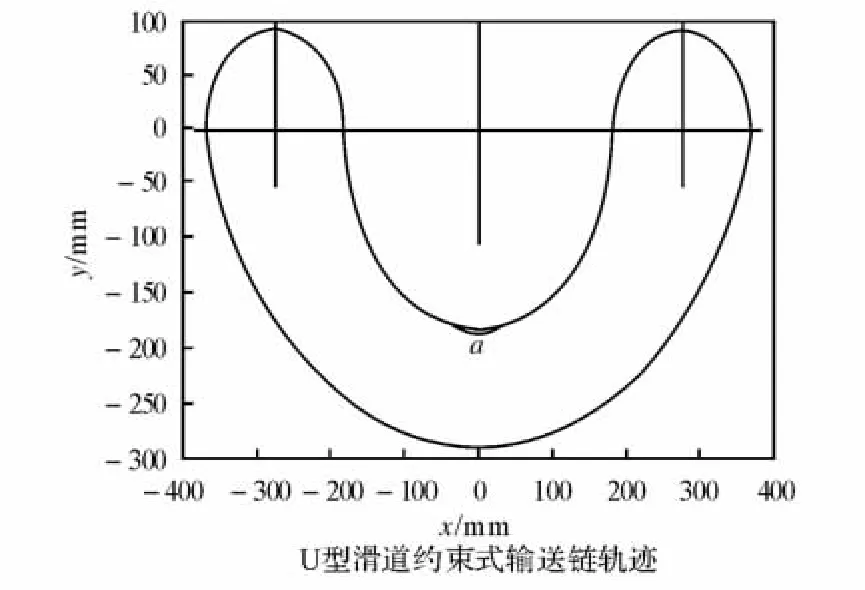
图5 U型滑道约束式输送链轨迹Fig.5Trajectory of constrained chain with U-type slide
4 结论
针对U型滑道约束式链传动系统,添加实时补偿轨迹,可以有效地消除轨道约束型输送链因多边形效应而产生的被拉伸或被压缩的现象,
以实现输送链连续平稳运行。该分析及计算方法可以应用在其它的轨道约束型链传动当中,为链传动多边形效应的进一步研究提供参考。
[1]李晓,洪林,李德胜.链传动多边形效应的一种补偿方法[J].天津理工大学学报,2008,24(1): 11-13.
[2]Shaoqing Shi,Xiongqi Peng.A new method for polygon effect analysis of saw chain[J].Journal of Mechanical Science and Technology,2012,26(9): 2705-2710.
[3]Weihua Liu,Yubin Gao.Compensation of variable pitch roller chains for the polygon effect[A].International Conference on Electronic&Mechanical Engineering and Information Technology[C],2011: 2900-2903.
[4]张玲玲,陆天炜,吴鹿鸣,等.链传动多边形效应的实验研究[J].机械工程及自动化,2010(4): 97-99.
[5]李兆文,王勇.滚子链传动系统的减振降噪研究[J].组合机床与自动化加工技术,2009(8):19 -25.
[6]张春文,彭雄奇,赵宁,等.油锯锯链多边形效应动力学分析新方法[J].机械科学与技术,2012,31(3):392-396.
[7]丁毓峰.MATLAB从入门到精通[M].北京:化学工业出版社,2011.
[8]郭仁生.基于MATLAB和Pro/ENGINEER优化设计实例解析[M].北京:机械工业出版社,2007.
[9]荣长发,张明路.滚子链传动的振动盘那个特性分析[J].机械传动,2006,30(4):63-65.
[10]覃岭,谢君生,梁东城.基于MATLAB的链传动的可靠性优化设计[J].机械传动,2009,33(3): 67-69.
基于MATLAB的U型滑道约束式输送链补偿轨迹的实现
李英杰1,洪林2
Realization of compensation trajectory for constrained chain with U-type slide based on MATLAB
LI Ying-jie1,HONG Lin2
(1.School of Mechanical Engineering Tianjin University of Technology,Tianjin 300384,China; 2.School of Mechanical Engineering Tianjin University of Commerce,Tianjin 300134,China)
For a special kind of slow-speed overloading transmission chain with U-type slide,the polygon effect generated in a cycle process of power transmission is analysed,and to reduce the influence of polygon effect,a real-time position compensation for the trajectory of pin is made.Compensation trajectory curve is gained in MATLAB,it makes conveyor continuous smooth transmission inIn the given trajectory,and provides theoretical basis and reference for similar conveyor chain.
polygon effect;constrained conveyor;compensation trajectory;MATLAB
TH134.21
A
1001-196X(2014)05-0041-04
2014-01-20;
2014-03-12
天津市应用基础与前沿技术研究计划项目(13JCZDJC34100)
李英杰(1989-),男,天津理工大学硕士研究生。
