具功能反应食饵捕食模型动力学分析*
2014-09-17钟晓芸郭上江
钟晓芸,郭上江†,李 洁
(1. 湖南大学 数学与计量经济学院,湖南 长沙 410082;2. 湖南大学 物理与微电子科学学院,湖南 长沙 410082)
Lotka-Volterra模型[1]是研究化学反应及鱼群变化规律的一类重要数学模型.考虑具功能反应的食饵捕食系统:

式中:h(x)表示食饵种群的相对增长率,φ(x)为功能反应函数.文献[1-4]研究了这个系统极限环的存在性.文献[1]列举了几种系统,包括食饵具非线性密度制约的系统,这时g=0,h(x)=x/(N+x),φ(x)=x,它仅有一个不稳定的平衡点.如果g=0,h(x)=x,φ(x)=x/(1+Ax),则在捕食者饱和情形,系统至多存在一个非平凡平衡点;而在捕食者竞争情形,系统存在一个非平凡平衡点.后来,文献[2-4]研究了g=0,φ(x)=αxn/(1+βxn)等情况下系统的动力学性质,着重讨论了极限环的存在性.关于g≠0时的相关研究较为困难,这方面研究得到的结果很少,可参考综述文章[1,5].本文研究g≠0时功能反应函数φ(x)=αx/(1+βx)的食饵捕食系统:

(*)
式中:a,c,α,β,δ,g均为正常数. 由于研究的实际意义,本文重点讨论系统(*)在G={(x,y)|x≥0,y≥0}内平衡点的性态.本文约定:ω=αk-δβ,τ=ωα+g(1+c-2aβ),κ=2aβ2-4(c+1)β-1.
1 平衡点性态分析
定理1设x0为ωx-δ+gα-1(1+βx)2(ex+cx-a-1)的零点,而x1是ex+cx-a-1=0的解,则:
1)当ω≤0时,系统(*)在G上有两个奇点O(0,0),M1(x1,0).
2)当ω>0且τ>0,κ<0时,系统(*)在G上有3个奇点O(0,0),M1(x1,0)及M0(x0,y0),这里x0>δ/ω.
证明由系统第1个方程式得等倾线I1:y=(1+βx)(a-cx-ex+1)/α.当y=0时,H(x)=-a+cx+ex-1在(0,+∞)上有唯一的零点x1.曲线I1从正y轴上点(0,a/α)连续移动到x正半轴上点(x1,0).由系统(*)的第2个方程式得等倾线I2:y=(-δ+kαx/(1+βx))/g,显然I2经过点(0,-δ/g),平衡点为O(0,0).当x≠0时,a-cx-ex+1-αy/(1+βx)=0.又y=0或y=(-δ+kαx/(1+βx))/g,且y=0时,x=x1,所以M1(x1,0)是平衡点.当y≠0时,f(x)=ωx-δ+g(1+βx)2(ex+cx-a-1)/α=0.由于f′(0)=τ>0,κ<0,所以f′(x)>0.又f(0)<0,f(+∞)=+∞.故f(x)=0有唯一正解x0,这时y0=(-δ+ωx0)/(g(1+βx0))>0.定理1得证.
定理2令x0是ωx-δ+gα-1(1+βx)2(ex+cx-a-1)的零点,x1是ex+cx-a-1=0的解,则:
1)O(0,0)是系统(*)的鞍点.
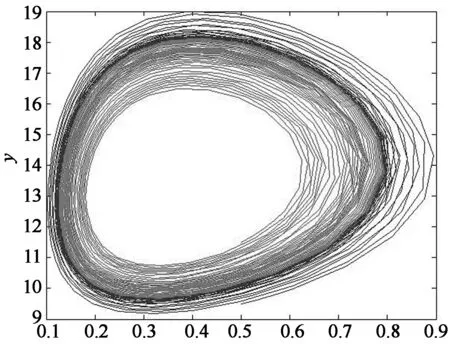
2)当ω≤0或ω>0,τ>0,κ<0 证明考虑系统(*)的Jacobi矩阵Δ(x,y). 由detΔ(0,0)=-aδ<0知O(0,0)是鞍点.定理2(1)得证. 当a=c=1,β=2,k=2,α=0.5,δ=0.25,g=0.05时, 得到x1=0.442 9,x0=0.462 5,M1(x1,0)是稳定结点. 由于y0=-0.194 8<0,这时系统(*)只有两个奇点(0,0),(x1,0). 定理3设 其中x0是ωx-δ+gα-1(1+βx)2(ex+cx-a-1)的零点. 则: 1)当h>0,M>0时,(x0,y0)是不稳定焦点或结点. 2)当h>0,M<0时,(x0,y0)是鞍点. 3)当h<0,M>0时,(x0,y0)是稳定焦点或结点. 4)当h=0,M>0时,(x0,y0)是中心型平衡点. 证明首先,直接计算有detΔ(x0,y0)=x0y0M. 由定理1 2),当ω>0,τ>0,κ<0,时,M0(x0,y0)是系统(*)在G上的奇点.若M<0,则(x0,y0)是鞍点.若M≥0,注意到g(1+βx0)3TrΔ(x0,y0)=h,则当h>0且 M>0时,有TrΔ(x0,y0)>0,所以(x0,y0)是不稳定焦点或结点.当h<0且M>0时,TrΔ(x0,y0)<0,(x0,y0)是稳定焦点或结点.当h=0,M>0时,TrΔ(x0,y0)=0,所以(x0,y0)是中心型平衡点.定理3得证. 取a=4,c=0.05,β=0.312 5,k=6,α=1,δ=1,g=0.05,则x1=1.593 4,x0=0.213 3.而h=-0.014 6<0,M=4.641 1>0, 从而(x0,y0)是稳定焦点. 其中y0=3.996 5. 定理4当ω≤0时,系统(*)无极限环,M1(x1,0)是全局渐近稳定的结点. 其中x1是ex+cx-a-1=0的解. 证明当B≡1时,由Bendixson-Dulac判别法[6]直接得到,系统(*)在M1的外围不存在闭轨线.定理4得证. (1+βx0)3 证明直接计算可得系统(*)的特征方程为λ2+pλ+q=0,其中p=-h/(g(1+βx0)3),q=x0y0M.当特征根均具负实部,即p>0且q>0时,M0(x0,y0)是全局渐近稳定的,在定理5条件下,由于ω>0,τ>0,κ<0, 又x1>x0,由定理2,O(0,0),M1(x1,0)是系统(*)的鞍点. 注意到p>0且q>0时,M>0且h<0. 特征方程λ2+pλ+q=0的判别式p2-4q<0,从而M0(x0,y0)是第一象限内唯一的全局渐近稳定的结点. 当a=3,c=0.05,β=0.25,k=1,α=1,δ=1,g=0.05时, 有x1=1.369 0>1.344 7=x0,h=-0.772 8<0,M=0.507 0>0, 而y0=0.127 6>0. 由定理5,M0(x0,y0)是该系统的全局渐近稳定的唯一正结点. 定理6系统(1)满足(x(0),y(0))∈G={(x,y)|x≥0,y≥0}的解是有界的. 证明由解的存在唯一性,系统(*)满足正初始条件的解(x(t),y(t))∈G={(x,y)|x≥0,y≥0}.分两种情况讨论x(t):当x(0) 定理7当ω>0,β<(c+1)/a时,系统(*)无极限环. 证明取Dulac函数B(x,y)=(1+βx)/αxy.因此P=x(a-cx-ex+1)-αxy/(1+βx), Q=y(-δ+kαx/(1+βx)-gy).可知∂(BP)/∂x+∂(BQ)/∂y≤0.由Bendixson-Dulac判别法[6]知,系统无极限环. 定理8如果ω>0,α≥1,β≥(c+1)/a, (x0,y0)是不稳定平衡点,则系统在(x0,y0)外围至少存在一个稳定的极限环. x 系统(*)是否存在Andronov-Hopf分岔是需进一步研究的困难问题. 与文献[8]中224页中定理证明方法类似, 可以证明下述关于Andronov-Hopf分岔存在的充分条件. 定理9令φ(x)=bex[(gβ2/α-β)x2+(-1-β+2gβ/α)x+g/α]+(gβ2c/α)x3+[-2βc+2gβc/α-gβ2(a+b)/α]x2+[gc/α-c+(a+b)β-2gβ(a+b)/α]x+g(a+b)/α,以δ为分岔参数. 那么,当g=0且φ(x0)=0时,由x=x0,f(x)=(kα-δβ)x-δ+g(1+βx)2(ex+cx-a-1)/α=0得到δ0就是系统的Andronov-Hopf分岔值.当g≠0时,如果φ(x0)=0,φ′(x0)<0,则存在Andronov-Hopf分岔. 取a=c=k=1,α=β=2,b=g=0, 由定理9容易得到系统的分岔点δ=1/3[8]. 取参数值(***):k=b=c=1,a=α=β=2,g=1/200,则Andronov-Hopf分岔值δ0=0.277 2, 如图2所示. 图2 具参数值(***)的系统(1)出现Andronov-Hopf分岔 [1] BAZYKIN A D.Nonlinear dynamics of interacting populations[M].Singapore:World Scientific,River Edge, N J: 1998:11. [2] 彭煜, 窦霁虹, 王新秀.一类具功能反应的食饵与捕食系统的极限环[J].陕西科技大学学报,2009,27( 6):129-132. PENG Yu, DOU Ji-hong, WANG Xin-xiu. Limit cycles of system for predator-prey with function response[J].Journal of Shaanxi University of Science & Technology,2009, 27( 6): 129-132.(In Chinese) [3] 李辉, 王艺霏.一个具功能反应的微分生态系统的定性分析[J].北华大学学报,2008,9(1):1-4. LI Hui, WANG Yi-fei. A qualitative analysis of differential ecosystem possessing functional response[J]. Journal of Beihua University, 2008, 9(1): 1-4.(In Chinese) [4] 邱树林, 吴承强, 陈江彬.具有非线性密度制约的Holling II类功能反应的食饵与捕食者模型的定性分析[J].福州大学学报,2006,34(1):14-18. QIU Shu-lin, WU Cheng-qiang, CHEN Jiang-bin. Qualitative analysis for a kind of predator-prey model of HollingⅡ-function response with nonlinear density dependent[J]. Journal of Fuzhou University, 2006, 34(1): 14-18.(In Chinese) [5] RUAN S. On nonlinear dynamics of predator-prey models with discrete delay[J].Math Model Nat Phenom, 2009,4(2):140-188. [6] 张芷芬,丁同仁,黄文灶,等.微分方程定性理论[M].北京: 科学出版社,1985:5. ZHANG Zhi-fen, DING Tong-ren, HUANG Wen-zao,etal. Qualitative theory of ordinary differential equations[M]. Beijing: Science Publishing House, 1985:5.(In Chinese) [7] 黄立宏,伍锡如.一类非线性系统极限环的存在性[J].湖南大学学报:自然科学版,2008,35(7):90-92. HUANG Li-hong, WU Xi-ru. Existence of the limit cycle for a class of nonlinear systems[J].Journal of Hunan University:Natural Sciences, 2008,35(7):90-92.(In Chinese) [8] ROBINSON R C. An Introduction to dynamical systems, continuous and discrete[M]. Beijing: Mechanical Industry Press, 2005:5.
2 边界平衡点及正平衡点的全局稳定性

3 极限环和Andronov-Hopf分岔