锂离子电池参数辨识与SOC估算研究*
2014-09-17刘云峰
朱 浩,刘云峰,赵 策
(湖南大学 汽车车身先进设计制造国家重点实验室,湖南 长沙 410082)
电池的SOC估算精度是影响电动汽车性能的重要参数之一.准确的电池SOC估计能够为整车功率分配提供依据,同时结合电池管理系统的软件,可以优化电池的运行情况,提高电池的使用寿命.
目前电池SOC估算方法主要有开路电压法、安时计量法、卡尔曼滤波法、神经网络法以及前面几种方法的联合估算法等[1].开路电压法需要电池长期静置来测量开路电压,不适宜在汽车启停频繁时使用;神经网络法由于模型复杂,模型精度依赖于训练数据集的完备性,因此还停留于理论研究阶段;安时计量法是目前主要的电池SOC估算方法,但极易受到SOC初值以及传感器误差的影响,使得电池SOC估算精度降低;卡尔曼滤波法采用状态空间描述电池所处状态,根据模型输出与测量输出偏差校正电池状态,相比经典的Wiener滤波法,卡尔曼滤波器具有递推形式,不需要存储全部历史数据,易于在计算机上实现,但需要精确的系统模型以及噪声的统计特性[2].本文以某国产三元材料锂电池包为研究对象,额定电压55.5 V,额定容量60 Ah,单体电池额定电压3.7 V,单体容量30 Ah.基于SAFT公司提出的RC模型,采用多元线性回归方法辨识模型参数,然后采用模糊自适应卡尔曼滤波算法估算电池的SOC.
1 RC等效电路模型
图1所示的电池电路模型是SAFT所提出的.模型包含两个电容和3个电阻,Cb为一个容量很大的电容,描述电池存储的容量,Cc为一个容量相对较小的电容,主要描述电池的极化现象;Rt为欧姆内阻,Re为终止电阻,Rc为容性电阻.它们都是电池SOC的函数.

图1 RC等效电路模型
由图1所示的电路图采用基尔霍夫电压电流定律可求出端电压的表达式如式(1):

(1)
UCb0和UCc0表示初始时刻两个电容上的电压,Ib和Ic分别为流过Re和Rc上的电流,电流方向如图1所示.
以Cb和Cc上的电压为状态量,端电流Is为输入量,建立电池的状态空间模型如式(2):
(2)
模型的输出量为端电压Ut,输出方程为:
(3)
2 模型参数辨识
为了辨识电池的模型参数,采用脉冲放电实验,得到电池端电压的脉冲响应,根据得到的数据采用多元线性回归的方法辨识系统参数.脉冲放电实验在相等间隔为10%的SOC点之间进行,实验过程中保持温度不变,每个脉冲实验的间隔时间为1 h,以让电池达到稳定状态.在开始脉冲实验之前测量电池的开路电压,得到对应SOC的开路电压值.脉冲放电的示意图如图2所示,采样时间间隔为T=0.05 s,放电电流为60 A,放电时间持续18 s,之后将电池静置90 s,电池端电压响应曲线如图3所示.

t/s

t/s
根据实验获得的数据拟合开路电压与SOC关系,通过观察各阶曲线对实验数据的拟合效果,最后选取五阶曲线作为SOC关系与开路电压的函数关系式,测量数据与五阶拟合曲线的对比结果如图4所示.SOC与开路电压的表达式为:
Uocv=-106.73 SOC5+
248.25 SOC4-181.31 SOC3+
34.14 SOC2+17.27 SOC+46.88.
(4)
在每次脉冲放电测试开始前,电池都经过了一段时间的静置,达到稳态,所以,初始时刻电容Cb和Cc上的电压相等,即
UCb0=UCc0=Uinit.
此时电池的开路电压等于电容Cb,Cc上的电压,即Uinit,根据已知的SOC与开路电压的关系可以求得在特定SOC点的Uinit.
以图1中3个电阻连线的交叉点作为参考点,应用基尔霍夫电压电流定律,得到如式(5)的方程组:
(5)
化简上述方程组得到如式(6)的非齐次微分方程:
(6)

(7)
求解该微分方程,得到Ib,Ic的瞬态响应如式(8):
Ib=Is(1-Ce-t/τ).
(8)
在脉冲放电开始后的初始时刻,电流Ib的大小为:
(9)
根据初始条件即可解得Ib的瞬态响应为:
Ib=Is(1-ae-t/τ).
(10)
将Ib代入方程组(5),即可求得Ic的瞬态响应,进而将求得的Ib,Ic代入方程(1),求得端电压在脉冲放电实验下的响应方程为:
(11)
撤除脉冲电流后,端电压的响应方程为:
(12)
式中:UCb0′,UCc0′表示撤除脉冲电流后,Cb,Cc上的初始电压.
由式(12)可知,电池端电压在撤除电流后是一个缓慢变化的曲线,根据测量得到的数据采用最小二乘曲线拟合方法即可求得电池的时间常数τ.
电池在经过相当长时间的静置达到稳定后,电池的端电压即为电池的开路电压,由方程(12)可知,稳定后的开路电压为:
(13)
根据获得的数据对方程(11)采用多元线性回归的方法,辨识电池的模型参数.回归模型由方程组(14)给定,a1,a2和a3为待辨识参数.在进行参数辨识之前,需要假定a值,用多元线性回归系数r2来判定回归精度,只要超过0.99即可[3].
(14)
最后根据求得的a1,a2和a3,时间常数τ以及假定的a计算电池模型的参数.表1为在25 ℃时辨识得到的电池参数值.

表1 锂离子电池包等效电路模型参数
3 电池SOC估计
对电池荷电状态进行估计,影响估算精度的因素主要是电池模型精度和传感器所采集信号的精度.实际测量得到的信号都含有噪声,需要采用合适的方法滤除噪声干扰.卡尔曼滤波算法采用最小均方误差为估计准则,在实际应用中需要已知噪声的统计特性,实际信号中所含噪声统计特性往往是未知的,且由传感器采集信号中的白噪声在经过电路放大环节后会改变噪声的统计特性.因此有必要采用自适应卡尔曼滤波,实时估计噪声的统计特性,提高电池SOC估算的精度.
由方程(13)可知,通过实时估算电容Cb和Cc上的电压,就可以知道对应状态稳定之后的开路电压,进而根据拟合的开路电压与SOC的函数关系式求得SOC.
以方程(2),(3)作为自适应卡尔曼滤波的状态方程和输出方程,以文献[4]中的离散化方法将其离散.设采样时间T=0.05 s,输入量采用零阶保持器,并考虑过程噪声和测量噪声的存在,得到式(15)的状态估计模型:
(15)
系统参数A,B,C和D的值采用MATLAB中的函数ss,c2d和ssdata计算得到.A,B,C和D是SOC的函数,在不同采样点上拥有不同的值,在此假定两个相邻采样点[k,k+1]区间内的系统参数值A,B,C和D为常数,采用k时刻的值.
自适应卡尔曼滤波,根据观测得到的数据不断地修正噪声的统计特性,以提高滤波精度.Sage和Husa提出了基于观测的噪声统计极大后验次优无偏估计器[5],根据最新得到的新息更新噪声统计特性,更新过程中赋予每一时刻的噪声相同的权值.文献[6]提出在更新噪声统计特性时,应着重考虑新近数据对噪声统计特性的修正作用,采用指数加权系数.由于加权系数在初始时刻给予修正量较大的权值,容易使得滤波器由于突然较大的扰动而发散.为了克服上述缺点,本文采用模糊逻辑自适应卡尔曼滤波,通过监测新息均值和协方差的变化,对系统噪声和观测噪声的权值进行模糊调节.
状态估计的步骤为:
根据上一时刻的状态量后验估计值Xk|k以及当前时刻的输入量Uk计算当前时刻状态量的先验估计值Xk+1|k.
Xk+1|k=AXk|k+BUk.
(16)
计算当前时刻协方差矩阵的先验估计值Pk+1|k:
Pk+1|k=APk|kAΤ+ΓQkΓΤ.
(17)
计算卡尔曼增益Kk+1和残差RESk+1:
Kk+1=Pk+1|kCΤ(CPk+1|kCΤ+Rk)-1,
(18)
RESk+1=Zk+1-CXk+1|k-DUk+1.
(19)
(20)
对状态量和协方差更新:
Xk+1|k+1=Xk+1|k+αKkRESk,
(21)
Pk+1|k+1=Pk+1|k-KkCPk+1|k.
(22)
α为增益矩阵的加权系数,将式(17)代入式(18)可得:
(23)
由式(23)可知:增益矩阵与系统噪声和测量噪声直接相关.调整α的值,相当于调整增益矩阵的值,也就相当于调整系统噪声和测量噪声的值,使得系统模型更贴近于实际模型,提高了滤波精度.
加权系数α的值,采用模糊逻辑控制器求得.本文采用Sugeno模糊系统[7],输入量是残差协方差理论值与实际值的差值dk+1.
N为一段时间内的统计次数,根据残差在稳态滤波下的平稳遍历性质,其实际协方差可以用式(24)进行近似[8]:
(24)
残差的理论协方差与实际协方差的差值dk+1如式(25):
(25)
当dk+1等于0时说明正在进行最优滤波,此时加权系数α应为1;当dk+1的绝对值远大于0时,该测量时刻的数据应视为无效,α应取0值,其他情况时0<α<1.根据dk+1值的大小,划分5个模糊子集,分别为NL(负大),NS(负小),Z(零),PS(正小),PL(正大).相应的隶属度函数如图5所示.
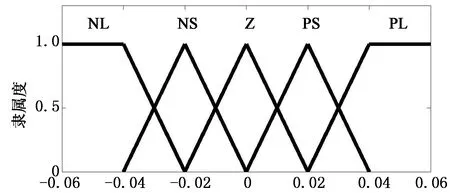
dk+I
模糊逻辑系统的输出规则如下:
Ifdk+1isAi,then αi=fi(dk+1);i=1,2,…,M.
Ai表示NL(负大),NS(负小),Z(零),PS(正小),PL(正大)中的一种,fi(dk+1)为dk+1的线性函数.M为规则的条数,在此M=5.整个模糊系统的输出α是各条规则输出αi按式(26)加权平均求得[9].
(26)
其中wi为加权系数:
(27)
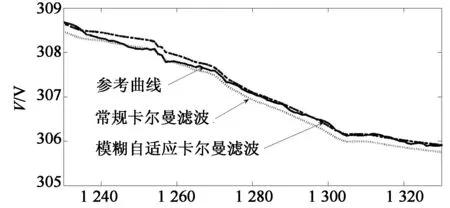
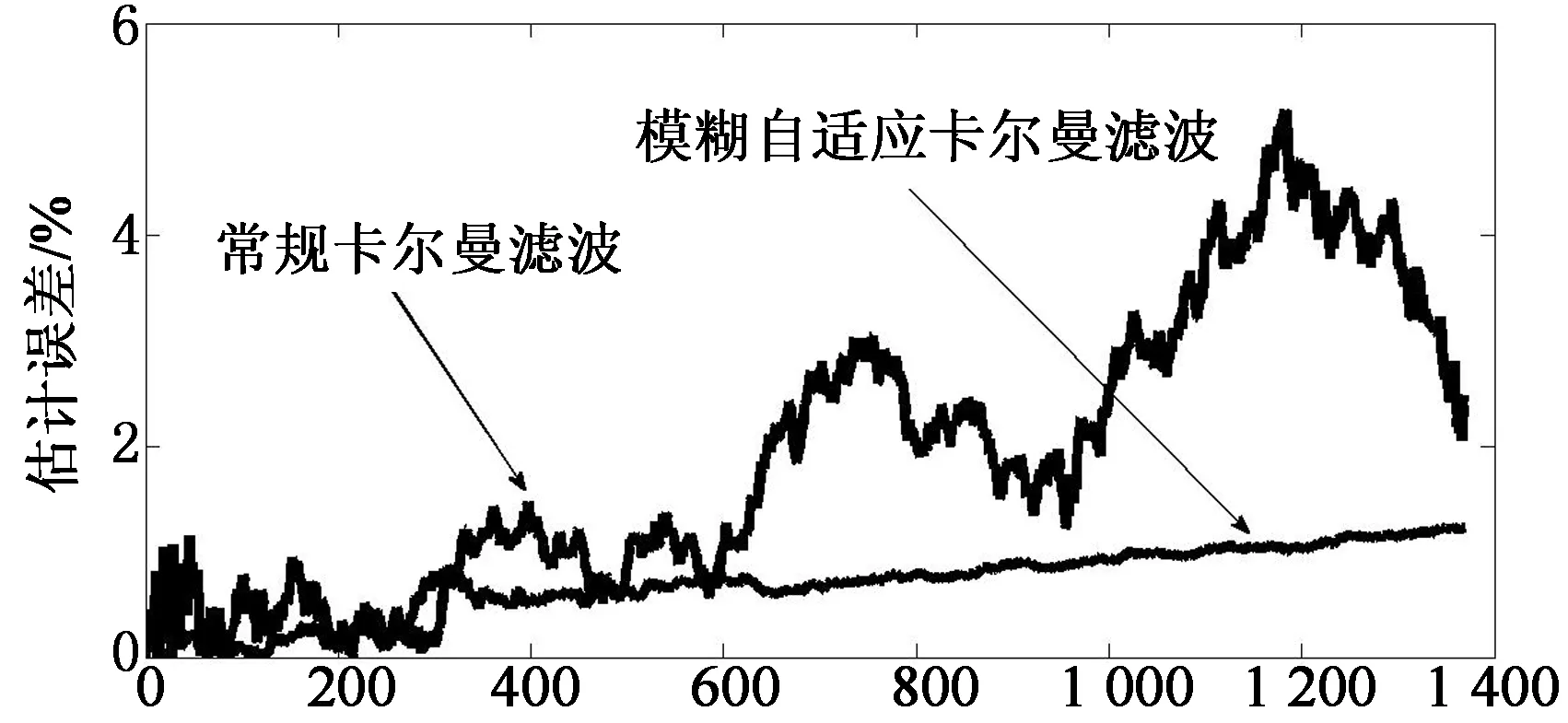
为了比较模糊自适应卡尔曼滤波算法与传统卡尔曼滤波算法的差异,根据参数辨识得到的电池模型,采用城市道路循环工况(UDDS)进行仿真,初始SOC值设为0.7.图6是截取的仿真过程中通过实时估算Cb,Cc值而计算得到的电池开路电压OCV的部分变化曲线,参考曲线表示在没有噪声条件下根据方程组(15)中的第一个方程计算得到的OCV值.根据估算的OCV值采用方程式(4)可以计算出仿真过程的SOC,图7是截取的仿真过程中经过放大后的部分SOC值曲线.图8是整个仿真过程中根据SOC参考值计算得出的SOC估计误差.
仿真时间/s

仿真时间/s
仿真时间/s
从图8可以看出,采用模糊逻辑自适应卡尔曼滤波的SOC估计误差比传统卡尔曼滤波要小.且滤波误差增长较为平稳,整体最大误差不超过2%,能够较为准确地估计电池的SOC.
4 结 论
针对SAFT公司提出的锂离子电池RC电路模型,提出了采用脉冲放电试验,以实验数据运用多元线性回归来辨识电池模型参数;在运用辨识到的模型估计电池SOC值时,采用了模糊自适应卡尔曼滤波算法,并与传统的卡尔曼滤波算法做了对比,结果显示本文提出的模糊自适应卡尔曼滤波算法,由于具有自动校正模型的功能,相比传统卡尔曼算法,能够较为精确地估计电池的SOC.
[1] 夏朝英,张术,孙宏涛. 基于推广卡尔曼滤波算法的SOC估算策略[J]. 电源技术,2007, 5(2):414-417.
XIA Chao-ying, ZHANG Shu, SUN Hong-tao. A strategy of estimating state of charge based on extended Kalman filter[J]. Chinese Journal of Power Sources, 2007, 5(2): 414-417.(In Chinese)
[2] WANG J P, GUO J G, DING L. An adaptive Kalman filtering based state of charge combined estimator for electric vehicle battery pack[J]. Energy Conversion and Management, 2009, 50(12):3182-3186.
[3] SANFORD W. Applied linear regression[M]. Hoboken:A John Wiley & Sons, Inc, Publication, 2005:19-32.
[4 ] 张桂香. 计算机控制技术[M]. 长沙:湖南大学出版社,2008:86-87.
ZHANG Gui-xiang. Computer control technology[M]. Changsha: Hunan University Press, 2008:86-87.(In Chinese)
[5] SAGE A P, HUSA G W. Adaptive filtering with unknown prior statistics[C]//Proceeding of the Joint American Control Conference. Boulder Colorado: 1969:769-774.
[6] 熊瑞,孙逢春,何洪文. 自适应卡尔曼滤波器在车用锂离子动力电池SOC估计上的应用[J]. 高技术通讯,2012,22(2): 198-204.
XIONG Rui, SUN Feng-chun, HE Hong-wen. State of charge estimation of lithiumion batteries in electric vehicles based on an adaptive extended Kalman filter[J]. High Technology Letters, 2012, 22(2): 198-204.(In Chinese)
[7] TAKAGI T, SUGENO M. Fuzzy identification of systems and its applications to modeling and control[J]. IEEE Transaction on SMC, 1985, 15(1): 116-132.
[8] ESCAMILLA-AMBROSIO P J, MORT N. A hybrid Kalman filter-fuzzy logic architecture for multisensor data fusion [C]//Proceeding of 2001 International Conference on Artificial Intel ligence. Mexico City: Intelligent Control.2001:364- 369.
[9] SASIADEK J Z, WANG Q, ZEREMBA M B. Fuzzy adaptive Kalman filtering for INS/GPS data fusion[C]//Proceeding of the 2000 IEEE international Symposium on Rio Patras:Intelligent Control, 2000:181-186.
