永磁同步机变频调速系统MATLAB建模与仿真*
2014-09-17张程金涛
张程 金涛
(1.福州大学电气工程与自动化学院,福州 350108)(2.福建工程学院信息科学与工程学院,福州 350118)
永磁同步机变频调速系统MATLAB建模与仿真*
张程1,2†金涛1
(1.福州大学电气工程与自动化学院,福州 350108)(2.福建工程学院信息科学与工程学院,福州 350118)
永磁同步电机由于谐波少、转矩的精度高,常用于伺服系统和高性能的调速系统.为研究需要,对其物理模型进行简化,建立了电机的数学模型及其基本方程.本文采用使直轴电流id=0方法进行研究,得到了基于转子磁场定向矢量控制下的电机电磁转矩方程.在Matlab/Simulink搭建整个系统仿真模型、转速和电流控制模块,并对系统进行仿真.仿真结果表明所得波形符合理论分析,系统响应快、超调量小,系统运行稳定,具有良好的动、静态特性.该方法采用易扩展的模块化设计,可在线修改和观察所有参数以及参数变化对系统控制效果的影响,从而能方便地验证各种控制策略,并据此选出高效的快速设计方案,缩短了研制周期,对系统设计和调试起到了很大的作用.
MATLAB, 永磁同步电机, 仿真
引言
永磁同步电机(PMSM)具有体积小、重量轻、能量转换效率高、运行可靠性高及调速范围广等优点,已经逐步取代直流伺服电动机而用于高性能的交流伺服系统中[1-2].因此建立永磁同步电机控制系统的仿真模型对验证各种控制算法,优化整个控制系统具有十分重要的意义.这里在分析PMSM数学模型的基础上,借助Matlab/Simulink强大的仿真建模能力,在Simulink中建立PMSM控制系统的仿真模型,通过对实例电机的仿真,给出了各种仿真波形,为PMSM控制系统的设计和调试提供了有效的途径.
1 PMSM的数学模型
永磁同步电机在忽略铁心饱和和电机绕组漏感,并且假设气隙中磁势呈正弦分布,同时又忽略磁场高次谐波的情况下,运用坐标变换理论,可以得到在同步旋转d-q坐标系下的数学模型通常由电压方程、定子磁链方程、电磁转矩方程、机械运动方程组成,具体为:
电压方程:

定子磁链方程:

电磁转矩方程:

机械运动方程:

其中ud、uq为定子电压dq轴分量;id、iq为定子电流dq轴分量;ψd、ψq为定子磁链dq轴分量;Ld、Lq为定子绕组dq轴电感;Rr为绕组电阻;ψr为转子永磁体产生的磁链;Te为电机电磁转矩;Tl为负载转矩;J为电机转动惯量;p为电机转子极对数;ωm为机械转子角速度,B为阻尼系数.
2 变频调速系统方案设计
系统使用转速-电流双闭环控制方案[3-4],考虑到PMSM进行变频调速时的强耦合、时变、非线性等特点,在内环对永磁同步电机进行空间矢量脉宽调制(SVPWM)控制,为了增强系统的鲁棒性及抗干扰能力,在外环采用速度PI调节器.系统原理框图如图1所示,系统主要由坐标变换、SVPWM、三相逆变电路、PI调节器等模块组成.
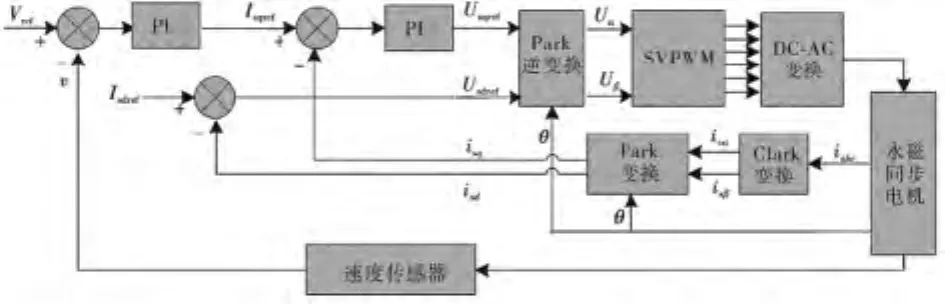
图1 变频调速系统原理框图Fig.1 Principle diagram of variable frequency acceleration system
3 永磁同步电机变频调速控制系统的模型建立及各模块分析
永磁同步电机仿真系统采用双闭环控制策略,至于电机的位置计算问题不属于本文的讨论范围,对于此问题可以进一步研究永磁同步电机系统的无位置传感器技术.根据模块化建模的思想,将图2所示的永磁同步电机控制系统分为若干个功能不同且独立的子模块,主要包括以下几个主要的功能模块:速度控制器模块、矢量控制模块、坐标变换模块、PWM发生器模块、PMSM本体模块等.在Matlab/Simulink环境下,通过这些功能模块的有机组合,建立永磁同步电机矢量控制系统的仿真模型,实现双闭环控制.
根据永磁同步电机变频调速系统原理结构,在Matlab7.0/Simulink 仿真环境下,利用SimPowerSystem里面丰富的模块库,在分析永磁同步电机数学模型的基础上,建立永磁同步电机控制系统的仿真模型[5-6],仿真模型框图如图2 所示.

图2 变频调速系统的PMSM仿真模型图Fig.2 PMSM Simulation Model of variable frequency acceleration system
建立模型后,就可直接对它进行相应的仿真分析.选择合适的输入源模块做信号输入,用适当的接收模块(如示波器)观察系统响应,分析系统特性.点击菜单栏Simulation上的Start命令开始仿真,结果输出到接收模块上.还可以修改系统模块及参数,来修正不符合要求的仿真结果,继续进行仿真分析.
3.1 速度控制模块
速度控制模块的结构框图如图3所示,由图3可以看出速度控制模块的结构比较简单,由PI调节器和限幅输出模块组成.通过反复调整Kp、Ki参数使系统输出达到最佳状态.电流调节其实就是转矩调节模块,将转速调节器的输出电流作为转矩调节器的输入,其中Saturation饱和限幅模块的功能是将输出的三相参考相电流限定在要求的范围之内.电流调节模型图与转速调节模型图相同.
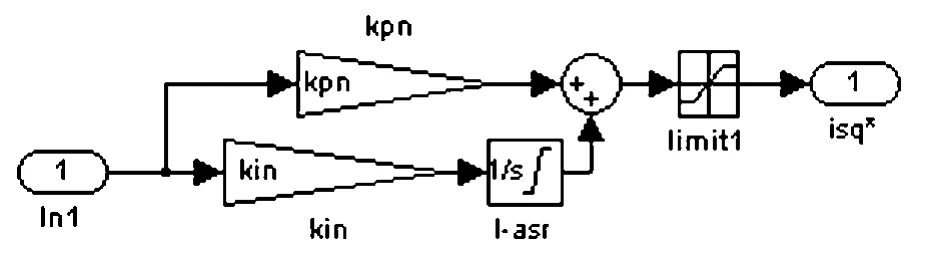
图3 转速控制模块结构框图Fig.3 Structure?diagram of speed control module
3.2 坐标变换模块
坐标变换模块的结构框图如图4所示,坐标变换模块实现的是dq轴旋转坐标系下的两相电流向abc静止坐标系下的三相电流的等效变换[7].
3.3 PWM发生器模块
PWM发生器模块的结构框图如图5所示,此模块为逆变桥提供SVPWM触发信号,该模块可以采用Matlab7.0的Simulink中的SimPowerSystem模 块库中提供的通用逆变模块搭建.
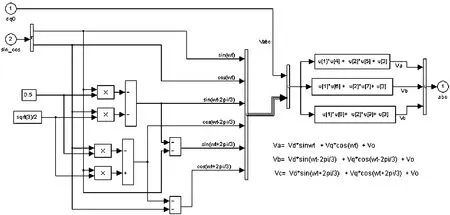
图4 坐标变换模块结构框图Fig.4 Structure diagram of coordinates transformation
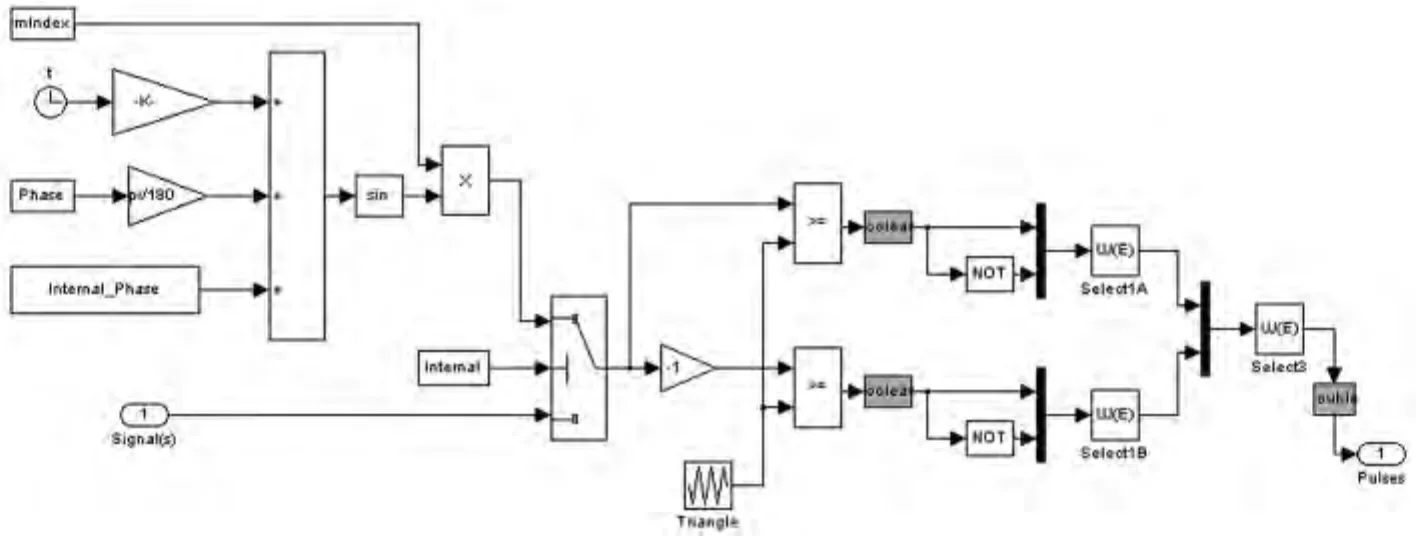
图5 PWM发生器模块结构框图Fig.5 Structure diagram of PWM generator
4 永磁同步电机控制系统的仿真及分析
根据图2所示的永磁同步电机控制系统的仿真电路图对该系统进行仿真实验和性能分析,以验证其可行性和有效性,在进行仿真实验前需要设置电机的相关参数.永磁同步电机的参数设置如表1所示.
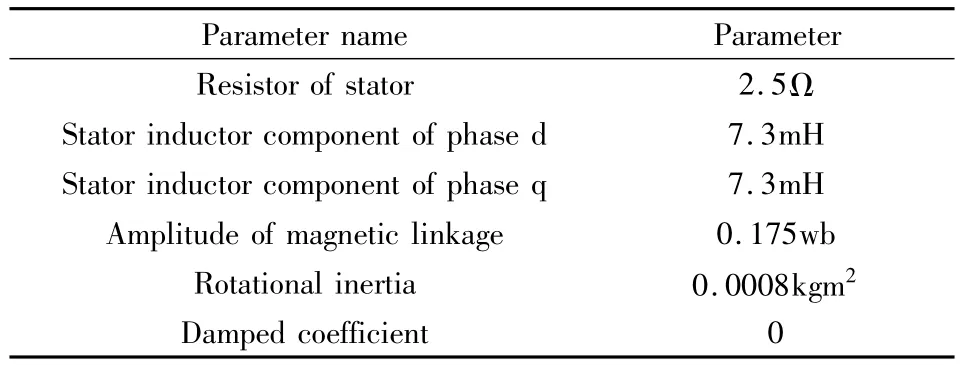
表1 PMSM参数表Table 1 PMSM parameter
对仿真参数的设置如下:
负载转矩起始值为5N.m(额定值),在0.1s时降至1N.m.
在Simulink中,选择工作窗口主菜单下的Simulation/simulation parameters,进入仿真参数设置窗口,可以在窗口中设置仿真起始时间、终止时间、仿真步长、解法和误差限等.在如图2-3所示的仿真电路图中,设置起始时间为0,终止时间为0.2s,选取ode23tb(可变阶次的数值微分公式算法)变步长解法,其它都使用缺省选项.
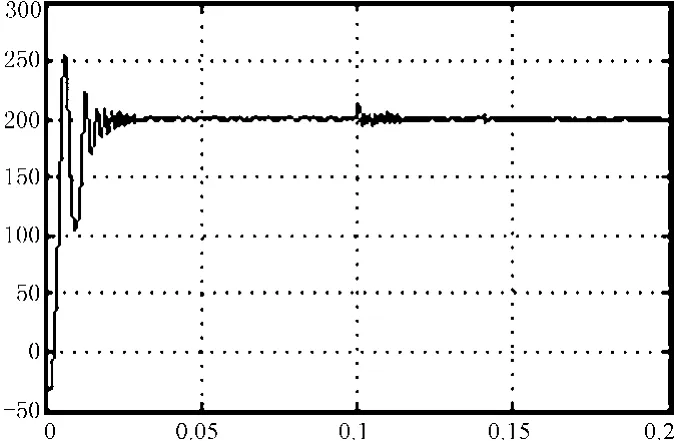
图6 转速响应曲线(200r/min)Fig.6 Response curve of speed(200r/min)
为了验证永磁同步电机控制系统仿真模型的静态和动态特性,分以下两种况进行仿真.
(1)当参考转速 speed(ref)=200r/min(低速)时,由示波器观测各参数波形图,转速响应曲线如图6所示,d轴、q轴电流响应曲线如图8所示,转矩响应曲线如图10所示.
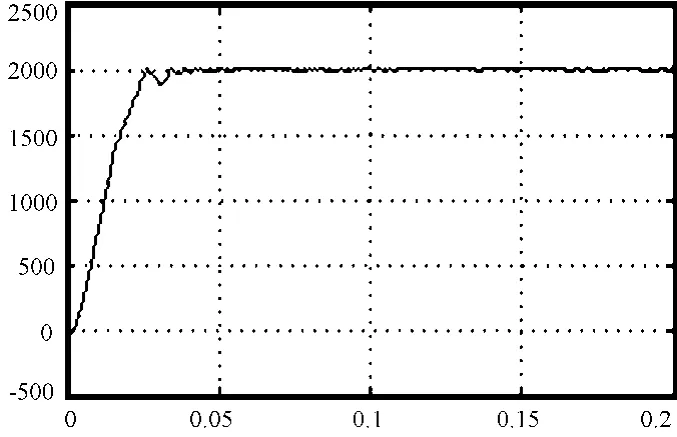
图7 转速响应曲线(2000r/min)Fig.7 Response curve of speed(2000r/min)
(2)当参考速度 speed(ref)=2000r/min(高速)时,由示波器观测各参数波形图,转速响应曲线如图7所示,d轴、q轴电流响应曲线如图9所示,转矩响应曲线如图11所示.
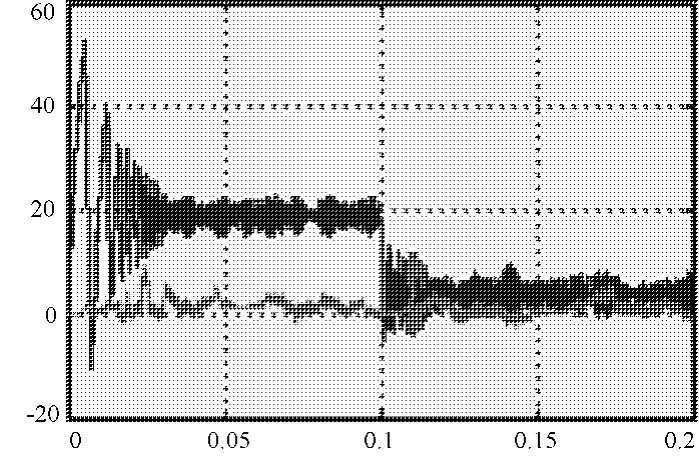
图8 dq轴电流响应曲线(200r/min)ig.8 Response curve of dq coordinate(200r/min)
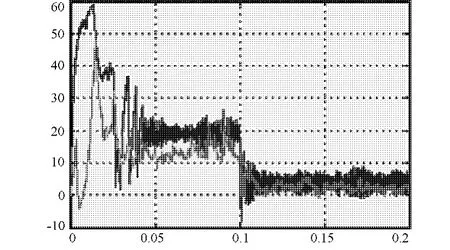
图9 dq轴电流响应曲线(2000r/min)Fig.9 Speed Response curve of dq coordinate(2000r/min)
由以上仿真波形可以看出:电机的转矩、电流在电机启动时,都急剧增加,但很快进入稳定状态,此时转矩值为5N.m.在0.1s时,由于负载转矩减小为1N.m,电流、转矩都出现轻微波动,但很快又都达到新的稳定状态.而电机转速由于惯性的作用,并未出现波动保持稳定.
在200r/min的参考转速下,系统响应较快且较平稳,实际转速能快速跟踪参考转速,但超调较大,电磁转矩能跟踪负载转矩,稳态时d轴电流略有波动,但基本平稳;在2000r/min的参考转速下,系统响应较快,转速跟踪几乎无超调,电磁转矩能够跟踪负载转矩,稳态时转矩和电流略有波动.
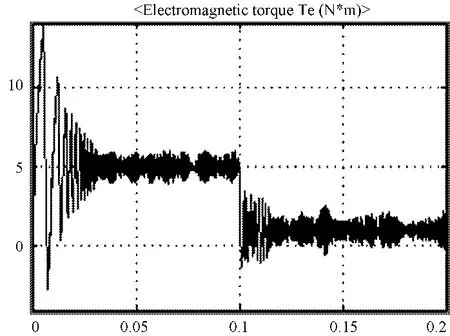
图10 转矩响应曲线(200r/min)Fig.10 Response curve of torque(200r/min)
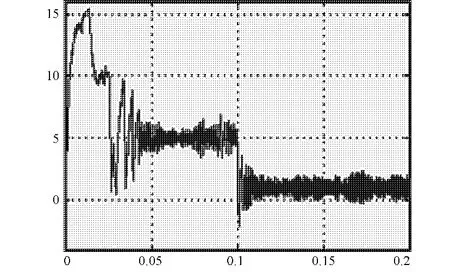
图11 转矩响应曲线(2000r/min)Fig.11 Speed Response curve of torque(2000r/min)
5 结论
在分析永磁同步电机数学模型的基础之上,建立了电机的数学方程,通过数学的方法去研究永磁同步电机,并在Matlab/Simulink里搭建模型并进行仿真.由电机仿真波形可以看出,系统具有调速范围较宽,动态响应好,稳态误差较小的特点,这与实际电机的运行状态是一致的,系统起动后保持恒定转矩,突加扰动时系统波动较小,充分说明系统具有较好的鲁棒性.采用该PMSM仿真模型可以便捷地实现、验证id=0控制算法,同时也为实际PMSM系统的设计和调试提供了有效途径.
1 陈伯时.电力拖动自动控制系统.北京:机械工业出版社,2005(Chen B S.Electric drive control system.Bei-jing:China Machine Press,2005(in Chinese))
2 王新,胡路东,徐娟.PMSM矢量控制在高端波轮洗衣机中应用的研究.电气传动,2012(42):10~13(Wang X,Hu L D,Xu J.Research of PMSM Vector Control Applied in High-performance Pulsator Washing.Journal of Machines.Electric Drive,2012(42):10 ~13(in Chinese))
3 薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用.北京:清华大学出版社,2004(Xue D Y,Chen Y Q.System Simulation and Application based on MATLAB/Simulink.Beijing:Tsinghua University Press,2004(in Chinese))
4 李三东.基于Matlab永磁同步电机控制系统的仿真建模.江南大学学报,2004(2):116~119(Li S D.Simulation modeling based on Matlab for Control syatem of PMSM.Journal of Jiang Nan University,2004(2):116~119(in Chinese))
5 孟鹏,邱晓燕,林伟.直驱式永磁同步风力发电动态特性的研究.电力系统保护与控制,2012(40):38~43(Meng P,Qiu X Y,Lin W.Study of the dynamic characteristics of directly driven permanent magnet synchronous wind turbine.Journal of Protection and Control of Power System,2012(40):38~43(in Chinese))
6 焦晓红,苏博.直驱永磁风力发电机最大功率跟踪的鲁棒控制.燕山大学学报,2012(36):445~451(Jiao X H,Su B.Maximum power tracking robust control for directdrive permanent magnet wind turbine generator.Journal of Yan Shan University,2012(36):445~451(in Chinese))
*The project supported by the National Natural Science Foundation of China(50907011),the Fujian Province Outstanding Youth Science Fund(2012J06012),Fujian Young Colleges Outstanding Scientific Research Training Program(JA1108)
† Corresponding author E-mail:aaa7997@sina.com
RESEARCH ON MODELING AND SIMULATION OF PMSM VARIABLE FREQUENCY SPEED REGULATING SYSTEM*
Zhang Cheng1,2†Jin Tao1
(1.College of Electrical Engineering and Automation,Fuzhou University,FuZhou350108,Chinese)(2.Fujian University of Technology,Department of Electronics,Fuzhou350118,Chinese)
PMSM due to little harmonic,high precision torque,commonly is used in the servo system and the high performance speed control system.In this paper,the physical model of PMSM is simplified and the mathematical model of the motor is established in order to facilitate research.Thispaper uses id=0 control manner which is the simplest manner is vector control methods,motor electromagnetic torque equation is established based on rotor field oriented vector control.The system model,speed and current control block are build and simulated with MATLAB/Simulink.Simulation results shows that the waveform is consistent with thoretical analysis,the model has fast response and small overshoot.The system runs stably with good dynamic and static characteristics.The simulation makes full use of modularization design.All the parameters and their influence on the system can be changed and observed.It also can easily validate the control strategies and select the most suitable one.So this kind of simulation is good for system design and adjusting and validating.
MATLAB, PMSM, simulation
25 September 2012,
23 July 2013.
10.6052/1672-6553-2014-025
2012-09-25 收到第 1 稿,2013-07-23 收到修改稿.
*国家自然科学基金资助项目(50907011)、福建省杰出青年科学基金(2012J06012)、福建省高校杰出青年人才培育基金(JA1108)
E-mail:aaa7997@sina.com