步进控制技术在绕线设备系统中的应用*
2014-09-16张凯军
张凯军
(南京电子技术研究所, 江苏 南京 210039)
步进控制技术在绕线设备系统中的应用*
张凯军
(南京电子技术研究所, 江苏 南京 210039)
为了满足绕线设备系统的稳定精密绕制要求,研制了基于步进控制技术的绕线设备系统。在简述步进电机、步进驱动器及步进控制器技术特点的基础上,讲述了步进控制技术在绕线设备系统中的应用,介绍了绕线设备的系统组成、工作原理、技术特点和软硬件实现方法,并给出了设备电气系统接线图和部分系统控制程序段。使用结果表明,采用步进控制技术的绕线设备控制系统实时性好,自动参数可以灵活设置。系统性能稳定,绕线精度高,能满足工艺使用要求。
步进电机;步进驱动器;步进控制器;绕线系统
引 言
绕线设备是专门用于产品绕线生产的工具。绕线系统的性能好坏直接影响到绕线产品的质量稳定性及工艺一致性,还影响到生产厂家的经济效益。
步进电机是一种用电脉冲信号进行控制,将电脉冲信号转换成相应的角位移或线位移的电动执行机构。由于受脉冲的控制,其转子的角位移量和速度严格地与输入脉冲的数量和脉冲频率成正比。通过控制脉冲数量来控制角位移量,可达到准确定位的目的。通过控制脉冲频率来控制电机转动的速度和加速度,可达到调速的目的,通过改变电机的通电顺序,可达到改变电机旋转方向的目的。
步进电机由于具有转子质量低、定位精度高、无累积误差、控制简单等特点,已成为运动控制领域的主要执行元件之一。步进电机是机电一体化的关键产品,广泛应用在各种自动化控制系统和机电一体化系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个行业的控制领域都有广泛的应用。
开发基于步进控制技术的自动绕线设备系统可以显著提高绕线产品的自动化生产效率和产品稳定性。采用步进电机及步进驱动器配合步进控制器的自动绕线控制系统,集信号采集显示与运算放大、自动驱动于一体,使系统操作简化,自动化程度高,稳定性好,可靠性强[1-3]。
1 系统组成
自动绕线设备系统主要由主绕线步进电机及驱动器、排线步进电机及驱动器、步进控制器、控制电源及绕线结构系统等组成。系统整体性能稳定可靠,操作简单,能为产品的自动绕线生产提供良好的生产平台。系统控制原理示意框图见图1。

图1 系统控制原理示意框图
系统使用的步进控制器DMC300A采用高性能DSP+FPGA主控,软件指令资源丰富、编程功能强大、使用简单;支持任意两轴直线、圆弧插补,每轴带2个硬件限位点;支持每轴200 kHz的脉冲频率,标准的梯形加速曲线;人机交互界面便捷:内嵌键盘模块、128×64点阵液晶显示,提供显示指令,用户可灵活控制显示;可在PC机编程下载用户程序或在键盘上直接编程。
2 工作原理
自动绕线控制系统主要采用科瑞特自动化有限公司生产的步进电机YK86HB80及配套的步进驱动器YK2608MG、步进电机YK110HB99及配套的步进驱动器YKA2811MA配合三轴步进控制器DMC300A进行联合控制,步进控制器通过接口卡与驱动器及外围硬件互联。它是系统的运算控制中心,同时也是用户对系统的监控操作平台。步进电机控制器根据系统程序协调控制主绕轴步进电机和排线步进电机工作。系统控制硬件实物见图2。

图2 系统控制硬件实物组成图
电气控制系统主要协调各结构部件的协同动作,同时实时采集系统现场工作参数进行运算显示。系统控制电气接线图见图3。步进控制器根据工艺需求程序进行运算处理,输出脉冲信号给步进驱动器,驱动器将脉冲信号放大后输出给步进电机,电机接到驱动信号后执行机械结构动作。步进控制器实时采集绕线圈数的计数信号和按钮等信号进行运算处理并在液晶屏上显示。
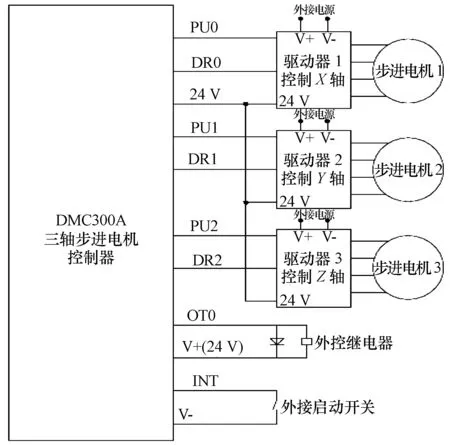
图3 系统控制电气接线图
采用步进电机配合步进控制器进行控制具有如下特点:
1)步进电机的角位移与输入脉冲数成正比,电机运转一周后没有累积误差,具有良好的跟随性;
2)由步进电机与驱动器电路组成的开环数字控制系统简单、廉价、可靠;
3)步进电机的动态响应快,易于启停、正反转及变速;
4)速度可在相当宽的范围内平滑调节,低速下能保证获得大转矩;
5)步进电机只能通过脉冲电源供电才能运行,不能直接使用交流电源和直流电源;
6)步进电机存在振荡和失步现象,须对控制系统和机械负载等采取相应的措施;
7)步进电机自身的噪声和振动较大,带瞬间负载的能力较差。
系统的主要技术特点如下:
1)完全数字控制,参数数字化可调。
2)排线精度高,排线起始位置、排线宽度灵活可设。
3)绕线圈数、出线位置精确可设,排线、绕线过程完全数控,产品成型效果好,与排线层数无关。
4)绕线效率高,采用专业运动控制系统及配件,稳定性好;模块化结构,安装调试方便。
5)参数设置合理、易学好用。
3 系统实现
系统实现包括硬件实现和软件实现,硬件主要由步进电机、步进驱动器、步进控制器(见图2)及机械结构绕线系统等组成,用于完成绕线的工艺功能。系统控制器硬件接线见图4,连接好控制器与驱动器及外界开关与电源后上电可实现系统控制功能。

图4 系统控制器硬件接线图
端点说明如下:
1)PU0、PU1、PU2为三轴脉冲控制信号。
2)DR0、DR1、DR2为三轴方向控制信号。
3)OT0~OT7为8个点位输出信号。
4)IN0~IN7为输入信号触发开关。
5)Run(IN14)、Stop(IN15)是2个特定运行和停止外接输入点。
6)L0~L2+/-是三个轴的左右限位,其中,L0+、L0-(IN8、IN9)为X轴的左右限位;L1+、L1-(IN10、IN11)为Y轴的左右限位;L2+、L2-(IN12、IN13)为Z轴的左右限位。
7)V+(24V)、V-(GND)为电源和地(内部提供电流<500 mA/路)。
8)RS232为连接PC的通信口。
系统软件实现主要指步进控制器的软件设计,步进控制器编程采用步进控制软件Motion300A进行编程,在计算机上根据工艺控制要求按程序指令进行程序设计。对控制器编程有3个步骤:程序输入,编译和下载到控制器。
程序设计采用汇编指令语句进行编写,设计完成后通过软件自动编译,把编译无误的程序段按工艺要求修改完善。只有编译全部正确后才能通过串口线下载到步进控制器中备用。
系统的监控操作界面如图5所示。可根据实际应用需求利用计算机画图软件进行布局设计,在画面中定义好所需的工作参数及显示位置,主要参数包括绕线速度、绕线圈数、加工数量等。设计完毕后将画面及设置的参数导入步进控制器的内部存储器中备用。当系统加电后点按键“编程”、“参数”、“运行”、“急停”等可进行系统参数的修改和控制设备的运行。系统运行时监控液晶界面会实时显示工作参数。

图5 系统监控操作界面图
软件程序每条语句由序号、操作指令与操作数等组成,系统部分程序段如下:
0001 SPEED 0,S10,S20,S30;
0002 SPEED 1,S12,S22,S32;
0003 SPEED 3,S14,S24,S34;
0004 ADJ 0,10;
0005 ADJ 1,10;
0006 INC M0;
0007 DISPLAY 2,M0,0;
0008 LINAD S16,S26;
0009 CWID S18,0,S28,0;
0010 DRVID 1,S40;
0011 PAUSE 1;
0012 DRVID 0,S60;
0013 PAUSE 0;
0014 LOOP 6,100;
0015 END
系统程序设计按照绕线工艺要求进行编写,实际自动绕线时,预先进入系统设置界面定义好工艺参数并确认无误后保存退出。实际进行自动绕线时,按控制器自动按键或设备外接自动按钮启动系统,自动完成绕线监控过程直至结束。
手动调试操作时,切换界面进入系统手动控制界面,单击步进控制按键开关可进行各运动轴的手动调试控制。手动调试的点动速度及加减速参数均可设置。自动参数设置时切换模式进入自动参数设置界面,进行自动绕线参数设置。如果需要,亦可直接在控制器上修改程序,点击编程按键输入系统权限密码后进行修改,修改后的程序在断电后自动保存。
4 结束语
采用步进电机及步进驱动器配合步进控制器的自动绕线设备系统操作简单,运行稳定,性能控制灵活可靠,能够满足绕线工艺要求。在生产使用时,根据实际绕线需要可在硬件配置不变的情况下实时进行系统控制程序的修改,以满足不同工艺生产的控制需要。对于系统扭矩适中、速度经常需要变化的运动控制场合,采用步进控制技术比较容易实现。配套的步进控制器液晶屏分辨率偏低,显示的内容不够丰富,开发类似于触摸技术的高性能一体化控制器会更好地满足客户的需要。随着步进处理技术和步进集成控制功能的进步,步进控制技术的应用将会越来越广泛。
[1] 温正伟. 电机解读系列之解读步进电机[J]. 无线电, 2012(9): 86-90.
[2] 张明. 步进电机的基本原理[J]. 机械与电子, 2007(9): 83.
[3] 黄建科. 步进电机在自动线中的应用[J]. 制造业自动化, 2009(8): 135-137, 172.
张凯军(1975-),男,硕士,高级工程师,主要从事机电一体化系统设计研究工作。
Application of Step Control Technology on Rolling Lines Equipment System
ZHANG Kai-jun
(NanjingResearchInstituteofElectronicsTechnology,Nanjing210039,China)
In order to satisfy the requirements of stable and precise rolling for the rolling lines equipment system, the rolling lines equipment system based on step control technology is developed. After brief description the technology characteristics of step motor, step driver and step controller, the application of the step control technology on the rolling lines equipment system is discussed. The system constitution, working principle, technology characteristics and software and hardware implementation methods of the rolling lines equipment are introduced, and the electrical system wiring diagram and part of the control program block are given. Practical use indicates that the rolling lines equipment control system using step control technology has good real time property. The auto-parameters can be configured flexibly. The system has stable performance and high rolling precision, satisfying the technical requirements.
step motor; step driver; step controller; rolling lines system
2014-02-16
TN383.6
A
1008-5300(2014)05-0061-04
