基于模糊神经网络的智能能量管理策略研究——以混合动力电动汽车模型为例
2014-09-13王洪亮
王洪亮
(石家庄职业技术学院 信息工程系,河北 石家庄 050081)
当前,世界各国都在致力于混合动力电动汽车(HEV)的研究,重点大多集中在基础工程问题上.而有关行驶工况和动力分配方面存在的问题并没有引起研究者足够的重视.事实上,混合动力电动汽车对行驶工况非常敏感.丰田Prius和福特Focus的燃油消耗性研究证实了这一论断的准确性.通常,人们根据汽车的速度曲线来定义汽车的驾驶模式.尽管有一些研究定义了其中的一些参数,但对这些参数精确定义的研究工作仍然不足[1].本文通过识别汽车行驶工况,根据工况的不同改变控制参数,采用模糊神经网络建立了混合动力电动汽车智能能量管理系统.
1 并联式HEV的控制策略
如果混合动力电动汽车能够一直满足驾驶者对转矩的要求,则电池的SOC(State of charge,电池剩余量)应该保持在一个限制区域内.电池的充/放电操作由汽车的运转模式决定:在再生制动和巡航驾驶模式下,电池处于充电状态;在汽车加速,内燃机的转矩不能满足要求而需要额外转矩的情况下,电池处于放电状态.
1.1 并联式混合动力电动汽车模型
由于内燃机与电动机都与车轮通过机械装置耦合在一起,所以并联式混合动力电动汽车可以直接分配两个动力源所产生的驱动力.在并联式混合动力电动汽车中,内燃机与电动机可以单独或一起为汽车提供驱动转矩.内燃机提供的动力既可以驱动汽车,也可以通过电动机对电池进行充电.本文所研究的混合动力电动汽车模型中,内燃机提供主要动力,电动机提供辅助动力.图1为利用CRUISE软件建立的混合动力电动汽车模型.此模型为并联式混合动力电动汽车,内燃机的额定功率为110kW,额定转速为2500r/min.电动机的额定功率为35kW,额定转速为2000r/min.
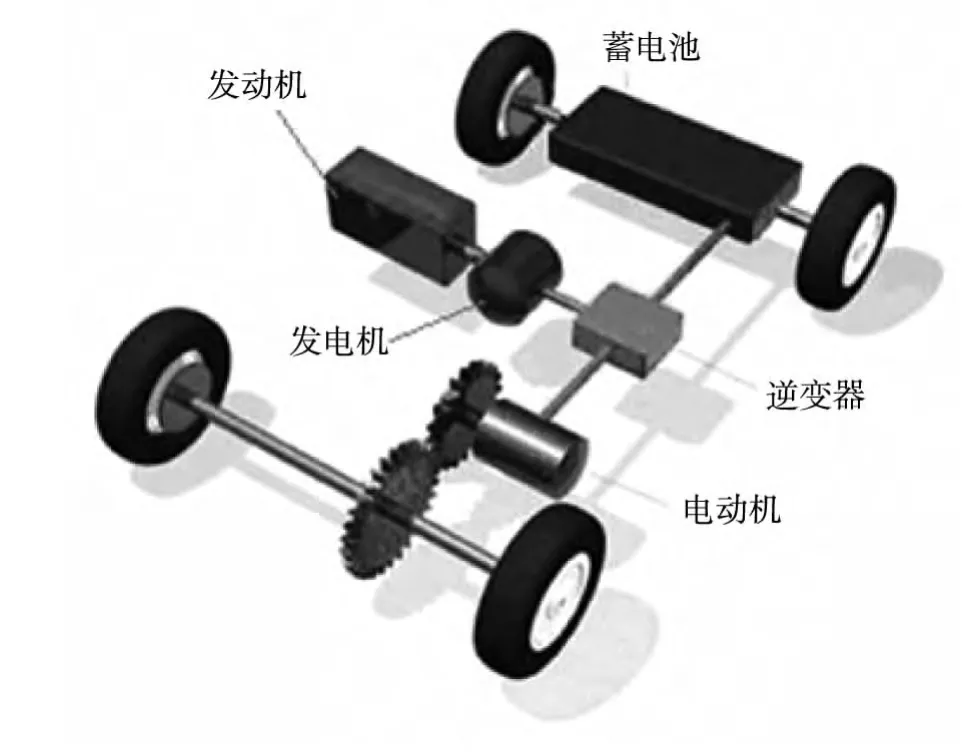
图1 混合动力电动汽车模型
1.2 内燃机工作区域分析
为了保持电池的SOC,应使内燃机与电动机在适当的区域内工作.控制内燃机的工作区域是实现节能减排的最基本办法.因此,在混合动力电动汽车的控制策略中,如何确定内燃机的工作区域是最重要的.
混合动力电动汽车的转矩平衡方程式为:Tm+Te=Treq,内燃机需要在(β1Te.max,β2Te.max)的区域工作,其中,β1,β2为内燃机工作区域参数;Treq为汽车所需转矩;Te,Tm分别为内燃机与电动机的转矩.
如果Treq>β2Te.max,则放电时,转矩的平衡方程可由Tm,放电+β2Te.max=Treq来表示.其中,Tm,放电为电池放电时的电动机转矩,Te.max为内燃机的最大转矩.
如果Treq<β1Te.max,则充电时转矩的平衡方程由公式 Tm,充电+β1Te.max=Treq来表示.其中,Tm,充电为电池充电时电动机的最大转矩.
如果β1Te.max≤Treq≤β2Te.max,则仅由内燃机为汽车提供动力.
1.3 行驶工况
图2中,工况A和工况B为在北京市两条路面环境差距比较大时采集的行驶工况图.本文以这两种工况作为神经网络识别的判别工况.

图2 用于神经网络识别的判别工况
1.4 遗传优化
遗传算法是基于自然选择机制中适者生存、不适者被淘汰机制发展起来的优化算法,具有适应性强、平行处理等特点,适用于对混合动力电动汽车控制策略的优化.本文即用遗传算法来优化控制策略中的参数β1和β2,将它们分别初始化为0.75和0.9;将适应度函数定义为汽车的燃油消耗及废气排放量最小但能够保持电池的SOC水平,其加权后的目标方程为:
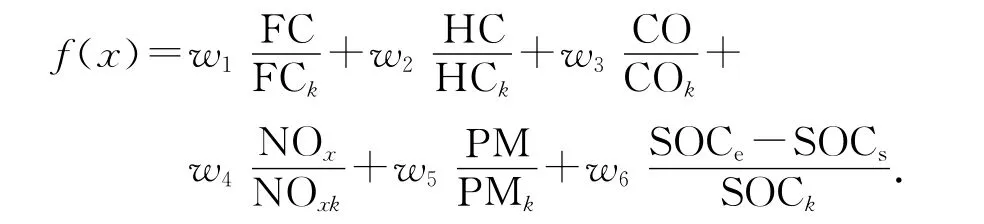
下角标带k的参数没有采用优化控制策略.定义燃油经济性和排放的等效重量因子w1=0.5,w2=w3=w4=w5=0.25;SOCs是开始时的电池剩余电量,为0.7;SOCe是结束时的电池剩余电量;FC为油耗;HC为碳氢化合物;PM 为碳烟微粒;令W6=10.利用遗传算法对工况A下的控制参数进行优化后,得β1=0.81,β2=0.92.优化结果见表1.

表1 行驶工况A下的优化结果
在SOC保持初始数值的条件下,由表1知,采用遗传算法优化后的燃油经济性与排放都要优于没有采用遗传算法优化的情况.优化后,燃油消耗降低4%,排放的NOx降低3.6%,CO降低1.2%,而PM与HC的排放量没有变化.
采用遗传算法对行驶工况B下的控制参数进行优化后,β1变为0.80,β2变为0.85.燃油经济性和排放的优化结果见表2.

表2 行驶工况B下的优化结果
在SOC保持初始数值的条件下,由表2发现,采用遗传算法优化后的燃油经济性与排放都优于没有采用遗传算法优化的情况.优化后,燃油消耗降低1%,排放的NOx降低0.5%,而CO,PM与HC的排放量变化不大.
2 行驶工况的识别
模糊逻辑控制是以模糊集理论为基础建立起来的控制理论,在很多领域的应用中都取得了成功.模糊网络采用一个输入、输出循环来代表复杂的非线性现象,模糊神经系统包括很多连接在一起的神经元.本文中模糊神经网络系统分为四层:第一层为输入层,在这一层中,每一个神经元为一个输入参数,f(1)=xi,其中xi表示输入参数;第二层为模糊化层,可表示为:f(x)=w1fk(2)=μij=exp其中w1表示权重系数,μij表示第二层输出量,aij表示模糊化的计算参数,δij表示模糊化层节点数;第三层为隐藏层,以模糊化层的输出作为输入,并将输出传递给外层的神经元第四层为输出层,可表示为:f(4)=∑wijμij,其中wij表示神经网络节点系数.行驶模式参数见表3.

表3 驱动模式参数
3 仿真结果
图3为行驶工况的模拟识别结果.表4给出了燃油消耗和排放的模拟结果.通过比较可以发现,考虑行驶工况后的燃油经济性与排放都要优于没有考虑行驶工况的情况,燃油消耗以及NOx的排放降低大约2%,CO降低1%,而PM与HC的排放量没有太大的变化.
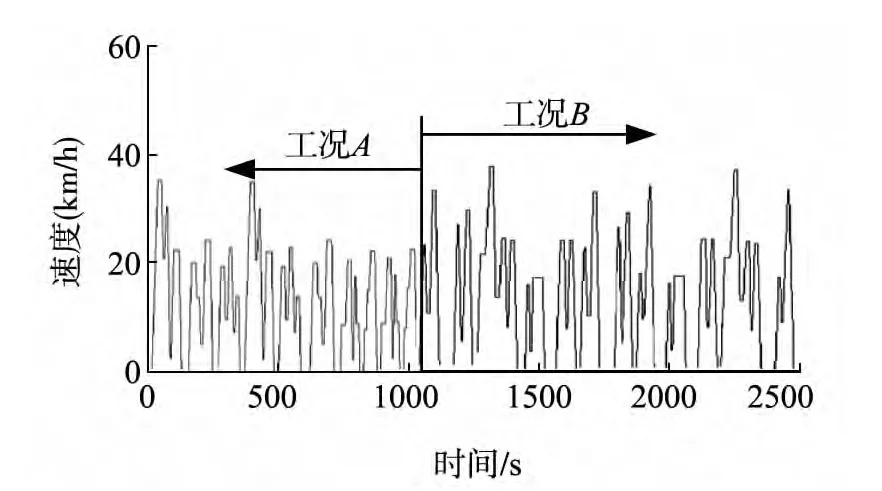
图3 行驶工况的识别

表4 燃油消耗和排放的模拟结果
4 结束语
本系统使用模糊神经网络识别不同城市的行驶工况,并根据识别结果调节内燃机的工作区域.模拟结果显示,在识别行驶工况后可使内燃机与电动机高效工作,并更好地实现节能减排.
[1]田毅,张欣,张良,等.神经网络工况识别的混合动力电动汽车 模糊控制策略 [J].控制理论与应用,2011(3):363-369.
