基于DSP的闸机控制技术
2014-09-12贺子钢包建东
贺子钢,包建东
(南京理工大学机械工程学院,江苏南京210094)
0 引言
闸机作为自动检票设备,被应用于很多不同的场合,而最常见的是用在轨道交通AFC系统中,对闸机的部分组件进行改造后也可应用于游乐场、图书馆的检票系统以及企事业单位的考勤系统等场合。以保证持票乘客可以安全进出、阻止无票乘客出入的“看门人”[1],在整个AFC系统中起着举足轻重的作用。
本文提出了一种基于DSP芯片TMS320F2812主控芯片闸机控制系统,实现对闸机两扇门的精确控制。该系统包括闸机通道传感器布置设计、主控板硬件电路设计和软件设计。系统的特点:1)采用新的通道传感器布置方案;2)使用CANopen通讯协议实现主控板对闸机扇门精确控制。通过测试实验验证了系统的可靠性,保证了闸机扇门开合的快速性、准确性、可靠性和实时性,并实现了设备设计的模块化、标准化。
1 闸机控制系统结构
整个闸机控制系统可以分为两个主要部分:主控单元和通道传感器阵列。主控单元主要负责运行控制软件部分,完成通道传感器信号采集、通行识别算法、数据处理、扇门控制算法等功能。
闸机扇门控制系统是本文研究的重点,其设计品质不仅关系到闸机的主要性能,而且还将直接影响到整个自动售检票系统的成败。该系统主要对通道内乘客的通行状况进行实时的监测,保证持票乘客能够顺利的通行,阻止各种非法通行,同时也提高了通行识别率、通行速度,最大程度上保证了乘客的通行安全和通行舒适度。扇门控制系统组成如图1所示。
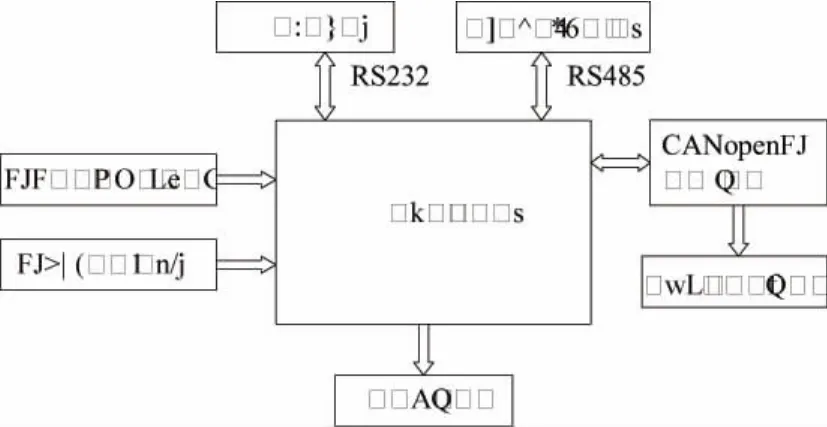
图1 闸机系统结构图
扇门控制系统各部分功能如下。
通道传感器阵列:主要完成采集通道传感器实时状态的功能、人体和物体识别的功能等,根据通行算法处理结果给出正确的判断,正常情况发给扇门执行控制模块开门或关门的命令,异常情况发出报警信号。
扇门控制模块:根据通行识别模块的命令来驱动扇门开启与关闭。在保证乘客通行安全的前提下,正确控制扇门的动作,使得左、右两扇门能够同步、平稳,迅速的到位。
报警及通行状态显示模块:通行状态显示模块主要负责显示闸机通道内的状态,如闸门正常开、关和乘客正常通行或乘客非法闯入等不同情形。当出现各种非法通行情况时,报警模块发出声光报警信号,提示管理人员进行相应操作。
系统通讯模块:主要包含与PC机通信的RS232,与中央控制单元通信的RS485以及主控板与扇门控制模块通信的CANopen通信模块。
2 系统总体设计
2.1 传感器布置
在闸机系统中,对通道行人通行的精确识别是闸机控制技术的重要组成部分,因此对闸机传感器的选择和布置的要求比较高,对于闸机的智能识别系统,通常采用的是反应灵敏、快速的对射式红外传感器,特别适合于识别运动体的通行情况。对射式红外传感器由投光器和受光器两个部分组成,它们被平行布置在闸机左右两侧的内侧,投光器和受光器之间不存在物体时,受光器会接收到投光器发射的红外线,此时传感器所对应的工作状态为“0”;投光器和受光器之间存在物体时,物体会挡住投光器发射的红外线,此时传感器的状态变为“1”。通道传感器的工作原理如图2所示。
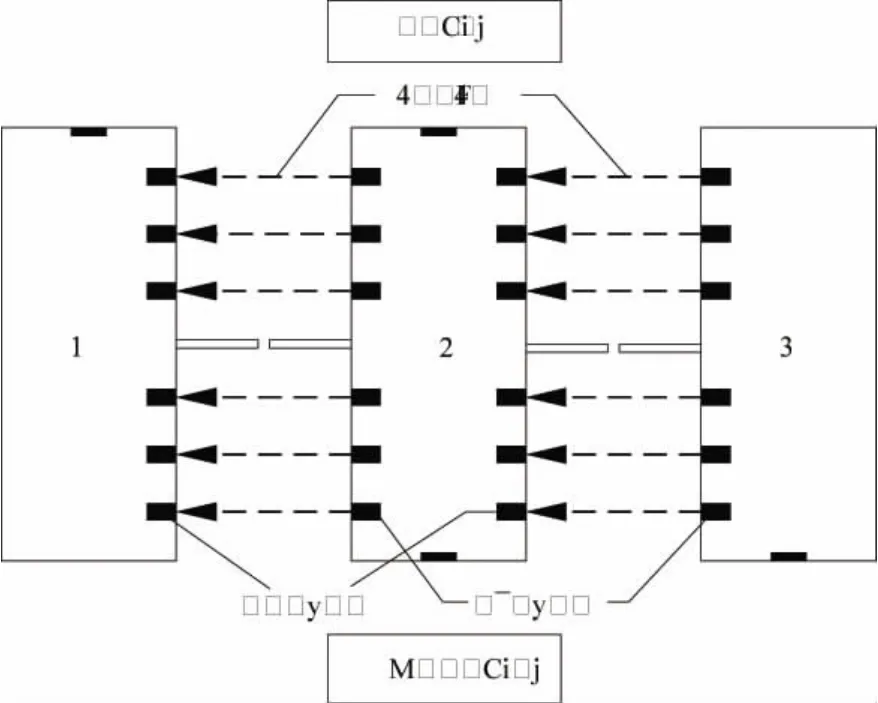
图2 对射型红外传感器工作原理示意图
通道传感器的空间布局主要取决于通行目标,即行人以及人和行李行走时的特征。同时也要考虑到闸机本身尺寸的大小,因为传感器都是要安装在闸机机壳内部的。据资料统计,我国男性的步长为550mm~775mm,女性为500mm~700mm[1]。根据测量,一般情况下准确测出行人通行情况需要3~5步,因此闸机长度可以设定为2m左右,闸机的收费高度一般根据各地的情况而定,基本上在1 200mm左右。通道传感器布置示意图3所示。
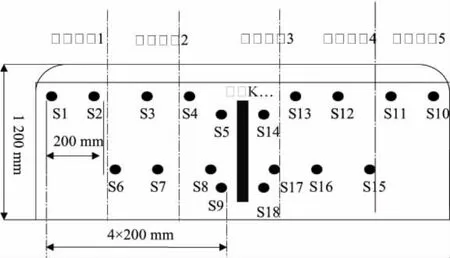
图3 通道传感器布置示意图
2.2 系统硬件设计
本系统按功能主要由通行识别模块、通行显示模块和扇门控制控制模块三部分组成,其主要实现对通行目标通过闸机时的行为进行检测及识别,并根据系统的判断结果来控制扇门控制模块工作。其中,通行识别模块中主要的组成部件是18对通道传感器,对通行目标进行监控,闸机扇门控制系统示意图如图4所示。
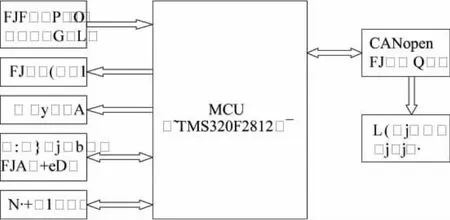
图4 闸机扇门控制系统组成示意图
针对闸机扇门控制系统所需完成的功能,本设计选用TI公司的TMS320F2812作为主控芯片。该芯片采用32位高性能的CMOS技术,主频可达150MHz,它集成事件管理器、A/D转换模块、SCI通信接口、SPI外设接口、eCAN总线通信模块、通用数字I/O口、外部中断等多功能模块[3]。其资源分配如下:
1)GPIOA和GPIOB用于采集18路通道传感器信号。
2)部分GPIOB,GPIOE和GPIOF用于声光报警和通行状态显示模块。
3)部分GPIOF和GPIOB预留接口,可用于外部模拟刷卡等功能。
3 系统软件设计
3.1 主体软件
软件品质直接关系到该系统的正常、准确、高效的运行,因此在软件设计时一定要理清系统工作的逻辑顺序,在基于硬件的基础上,充分发挥系统的功能。该系统的软件按功能可分为两大部分:通行识别软件部分主要指通行识别算法,对通道传感器采集的状态信息进行分析处理并给出正确判断;扇门控制软件部分的主要任务是控制扇门模块运动的整个过程,协调各个模块使扇门能够平稳、快速到位,并且在误动时上传报警信息。
根据系统需求及设计基本原则,该系统软件总体设计流程如图5[2]所示。由于C语言可移植性较强,因而本系统选择在TI公司提供的CCS3.3编程环境中用C语言进行程序编写。
3.2 CANopen协议实现
根据CANopen协议通讯规范CiA DS一301和DS一402(伺服驱动设备子协议)规定的一系列设备规范对通信对象字典(OD)、SDO报文、PDO报文格式进行参数设定[4-5]。工作流程如图 6[6]。
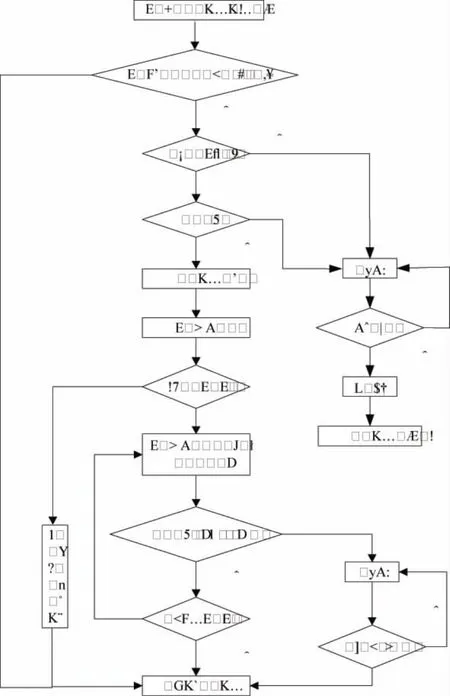
图5 软件总体设计流程图
4 结语
介绍一种基于DSP芯片TMS320F2812的闸机控制技术,采用面向对象的思想设计,具有很好的模块化特性和很高的适应性。通过后期的调试和测试,该设计很好的解决了闸机扇门控制的准确性、及时性、安全性等问题,也使得系统具有模块化特性,便于后期的维护、升级等优点。
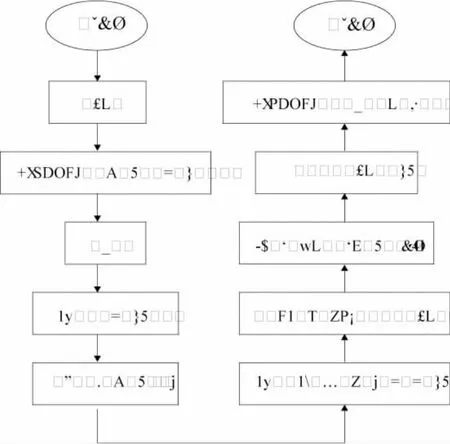
图6 CANopen通信工作流程
[1]李建省.轨道交通闸机控制系统中人体识别技术研究与实现[D].上海:上海大学,2008.
[2]和丽真.自动检票闸机拍打门控制系统研究[D].南京:南京理工大学.2013.
[3]顾卫刚.手把手教你学DSP—基于TMS320X281x[M].北京:北京航空航天大学出版社,2011.
[4]Elmo Motion Control CANopen DS 301 Implementation Guide.Elmo Motion Control.2003.9.
[5]Elmo Motion Control CANopen DSP 402 Implementation Guide.Elmo Motion Control.2003.9.
[6]Holger Zeltwanger.现场总线CANopen设计与应用[M].周立功,等译.北京:北京航空航天大学出版社,2011.
