基于Creo及SimMechanics对3-TPT并联机构的运动学仿真与模拟
2014-09-12刘伟锐赵恒华
刘伟锐,赵恒华
(辽宁石油化工大学机械工程学院,辽宁抚顺113001)
0 引言
并联机构作为一种新型的运动机构,近年来受到学者广泛的研究和探索,其具有刚度质量比大、响应速度快、加工精度高、环境适应性强和技术附加值高等优点[1]。利用计算机仿真软件可以快速准确的模拟出其空间结构和运动规律,它能够在设计时预测机构的性能并进行优化,及时地发现产品不合理甚至错的设计,不但可以缩短设计周期,减少研究经费,而且还可以提高设计品质,降低研制风险。
Matlab是Math Works公司推出的当今国际上最为流行的软件之一。Matlab中的SimMechanics是一个对动态系统进行建模、仿真和分析的软件包,其主要功能是将连杆、关节等机械部件用抽象的模块来表示,只需设置各部分模块的质量惯量特性和坐标系统,就可以得到完整机械系统的模型。在控制系统研究过程中,Simulink是最常用的软件之一,它输入参数简单,能够实时观测图像变化,所以受到广大研究者的青睐。本文利用模糊控制箱和Simu-link建立了模糊PID控制器,并与SimMechanics的模型想连接,构成整体的控制模型,并展开对3-TPT并联机构的探索与研究。
1 机构组成与工作原理
3-TPT并联机构简图如图1所示,其主要结构由定平台、动平台、平行机构、连杆和驱动杆等几部分组成。动平台与定平台均为正三角形,每根驱动杆和平行机构分别用虎克铰与动平台和定平台连接,伺服电机驱动三根驱动杆的伸缩,通过改变各驱动杆的长度,可以调整动平台的位置[2]。三根驱动杆承受外力,由从动平台和支撑杆组成的平行机构限制三个转动自由度,承受外力矩。图1为3-TPT并联机构的Creo虚拟样机模型(说明:由于平行机构对整个模型运动学方程无影响,所以建模时忽略了平行机构)。
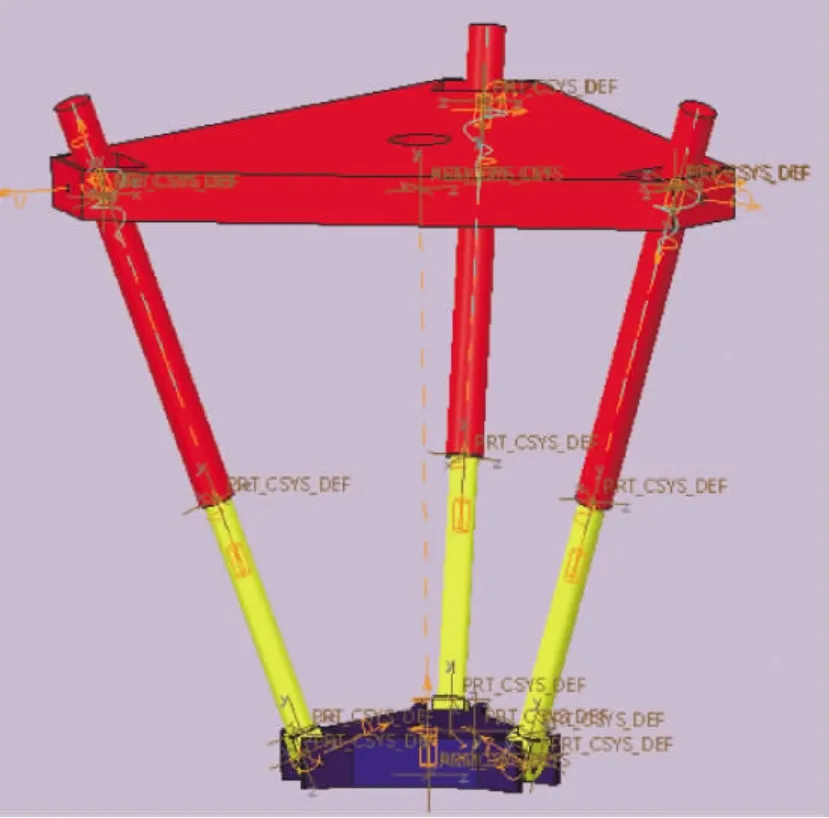
图1 3-TPT并联机构模型
2 运动学方程的建立
机构上下平台铰链中心点均按正三角形布置,各边对应分别平行,两平台相对位置在运动中始终保持平行,没有任何姿态变化。首先,在定平台中心建立基础坐标系oa-xayaza,xa轴正方向与 a1a2相交,ya轴正方向过点 a1,za方向竖直向下;同理,在动平台中心建立动坐标系ob-xbybzb,xb轴正方向与 b1b2相交,yb轴正方向过点 b1,zb方向竖直向下,如图2 所示[3]。
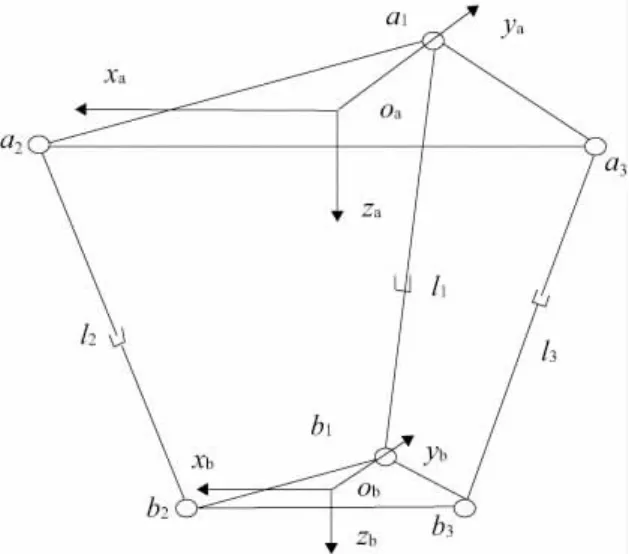
图2 3-TPT并联机构的空间坐标系
设定平台外接圆半径为R,动平台外接圆半径为r,并使 R >r;各驱动杆 a1b1,a2b2,a3b3的长度分别为 l1,l2,l3。由于定平台和动平台均为正三角形,所以定平台中三顶点在坐标系oa-xayaza坐标为:

同理,动平台三顶点在ob-xbybzb坐标为:

由于定平台和动平台始终保持平行,所以动坐标系oa-xayaza相对于坐标系oa-aayaza的齐次变换矩阵为[4]:

其中,(xb,yb,zb)为动坐标系的原点ob在基础坐标系oaxayaza中的坐标。
根据坐标变换理论,动平台三个顶点在基础坐标系oa-xayaza中的位置可表示为[5]:

其中,bi'是 b1,b2,b3在坐标系 oa-xayaza中的位置坐标;bi是b1,b2,b3在ob-xbybzb中的位置坐标。由两点距离公式得:

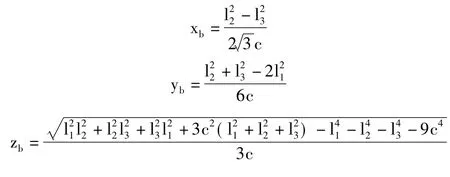
其中,c=R-r ,(xb,yb,zb)为动坐标系的原点 ob在基础坐标系oa-xayaza中的坐标。该式子成为3-TPT并联机构运动学逆解表达式[6]。其正解表达式为:
3.1 SimMechanics仿真模型
SimMechanics[7]是Simlink模块下一模块,其作用是为用户提供刚体、关节、约束和驱动以及传感器和驱动器等机构的模块,能对各种运动副连接的刚体进行建模仿真。SimMechanics还可以连接Simlink模块中的控制模型,提供机电一体化的建模仿真环境,为研究3-TPT并联机构提供了很大方便。
并联机构SimMechanics简图如图 3[8-9]所示,伸缩杆如图 4[10]所示。

图3 并联机构SimMechanics简图
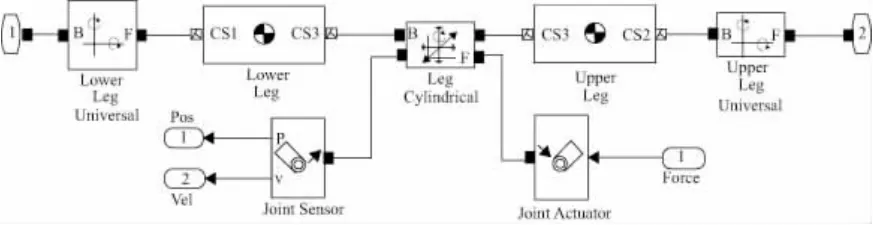
图4 驱动杆SimMechanics简图
图4 中Platform为动平台,通过伸缩杆与Ground模块相连,Env模块代表机构工作环境,通过该模块可以设定重力加速度向量、分析模式和容许误差等等,这个模块是所有SimMechanics模型必须具备的。F为Force的输入模块,输入Simulink信号;P和V模块分别代表Position和Velocity,分别用以检测位移和速度变化。
图5中两个Universal模块为万向铰(两个自由度,旋转两个角度),Cylindrical为柱面铰。Jiont Acuator为激励信号输入模块,可以向关节或构件施加力或运动,其输入为外部Simulink信号接口。Joint Sensor为关节传感器,向用户提供了位置、速度、加速度以及力矩等信息,同时也可以连接Simulink中的示波器来观察这些数据[11]。
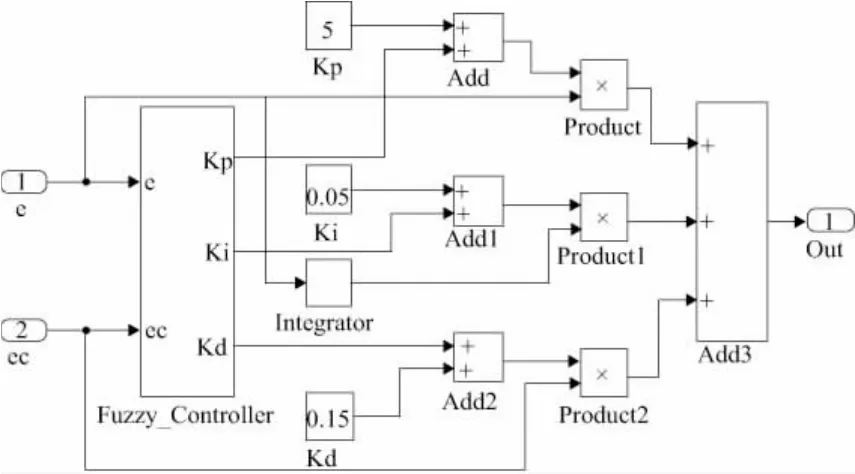
图5 模糊PID控制器
3.2 模糊PID控制器设计
模糊控制是利用模糊数学的基本理论和方法,把规则的条件和操作用模糊集表示,并把这些模糊控制规则以及有关信息作为知识存入计算机知识库中,然后根据控制系统的实际响应情况,运用模糊推理,即可自动实现对PID参数的最佳调整,这就是模糊PID的控制如图5[12]所示。本文把模糊控制和PID控制结合起来,利用模糊PID控制器对3-TPT并联机构进行设计和仿真,得到较好的控制效果。
利用Simulink对模糊PID进行建模设计。首先完成模糊控制器的设计,利用Matlab模糊控制箱设置论域和隶属度函数类型,输入控制规则,然后将其输出到Workspace中,最后封装子模块Fuzzy_Controller。图5中Kp,Ki,Kd为PID控制初始值,利用Simulink建模优势在于可以随时更改参数观察曲线变化,分析各参数对结果的影响。最后将整体封装,作为核心控制器输入到整体控制系统中[13]。
图6为并联机构整体控制系统,Leg Tracjectory为驱动单元,提供输入信号;Fuzzy_PID_Controller为模糊PID控制器,对输入的信号进行精准计算再输出到平台中。Plantform为图3封装后的子模块,即3-TPT并联机构示意图。令模糊因子ke=4,kec=30,解模糊因子k1=0.5,k2=0.1,k3=0.2,PID参数为Kp=5,Ki=0.05,Kd=0.15,得出曲线如图7所示。由图可知,模糊PID控制跟单独PID控制相比,优势比较明显:响应速度快,调节时间短,超调较小,控制效果比较理想。但模糊PID控制存在一定的稳态误差。模糊控制用模糊集合和模糊概念描述过程系统的动态特性,根据模糊集和模糊逻辑来做出控制决策,在解决复杂控制问题方面有很大的潜力,可以动态地适应外界环境的变化。
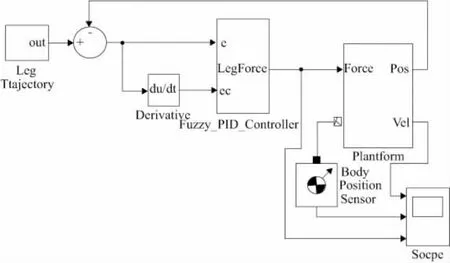
图6 并联机构控制系统
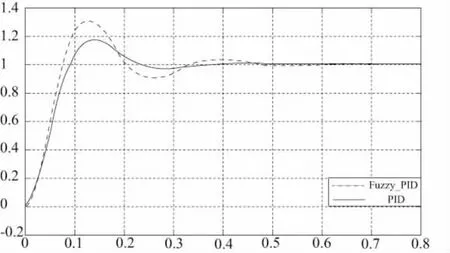
图7 对比曲线
4 仿真
令R=600mm,r=200mm,设定三杆运动方程为:
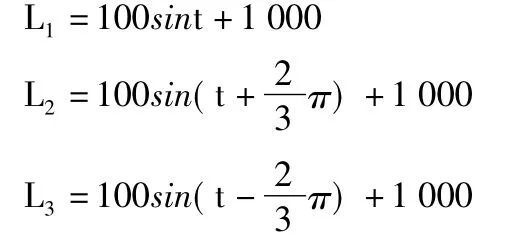
仿真结果如图8所示,可以看出:伸缩杆速度曲线变化平稳,曲线较为平滑,调节时间段、响应速度快、超调小,但存在一定误差。这些现象说明该机构平稳性较好,适合连续工作。

图8 伸缩杆速度变化曲线
5 结语
基于SimMechanics的并联机构仿真,在建立数学模型比较困难的情况下,可以较为简便的帮助设计者完成设计目的。其优势在于机构运行可视化,可以方便直观的了解仿真过程的输入输出的对应关系,检验设计参数的正确性。本文通过对3-TPT并联机构的认真学习研究,得出了正解逆解的表达式;通过Matlab中的SimMechanics模块建立并联机构模型,利用Simulink设计模糊PID控制器,并将二者相连接对整体结构进行了仿真模拟分析,得出了较为该并联机构较为平稳的结论,为日后更为深一层的研究学习打下了坚实基础。
[1]金云龙.并联机床的研究现状和发展前景[J].企业技术开发,2010,29(6):128-129.
[2]程仙国,赵恒华.基于Matlab对3-TPT并联机床的运动学仿真[J].辽宁石油化工大学学报,2008,28(1):19-22.
[3]王传强,赵恒华.3-TPT并联机床奇异性及平稳性研究[J].组合机床与自动化加工技术,2010,36(10):26-28.
[4]杨辉,赵恒华,付洪栓.并联机构虚拟样机的构建与仿真[J].工程设计学报,2012.
[5]吕春梅,谢里阳.3-TPT型并联机床仿真分析与研究[D].沈阳:东北大学,2005.
[6]左扣成,谢里阳.3-TPT型并联机床误差分析与仿真[D].沈阳:东北大学,2005.
[7]胡蜂,骆德渊,段栋栋,等.基于Pro/E与Simulink的Delta并联机器人运动仿真[J].机电工程,2012,29(8)982-984.
[8]李志斌,董旭明,钟德勇.基于SimMechanics的三自由度并联机器人仿真[J].工业控制计算机,2012,25(8)88-93.
[9]孙坚,丁永生,郝矿荣.基于SimMechanics的新型并联机构仿真平台[J].计算机仿真,2010,27(1),181-184.
[10]杨树川,邵金龙,杨术明,等.基于 Solidworks&SimMechanics的机构运动分析与仿真[J].河北工业科技,2011,28(4),221-225.
[11]王英波,黄其涛,郑书涛,等.Simulink和SimMechanics环境下并联机器人动力学建模与分析[J].哈尔滨工程大学学报,2012,33(1),100-105.
[12]刘义德,丛大成.基于并联机构的稳定平台建模与控制[D].哈尔滨:哈尔滨工业大学,2009.
[13]洪超,吴洪涛.一种用于柔性定位器的三自由度并联机构研究[D].南京:南京航空航天大学,2010.
[14]徐林生,刘艳娜.两足机器人的SimMechanics的建模[J].浙江大学学报(工学版),2010,44(7),1361-1367.
