单相并联型APF双环控制技术的仿真研究
2014-09-10乔玉库
章 穗,乔玉库,苏 威
(湖北工业大学电气与电子工程学院,湖北武汉 430068)
单相并联型APF双环控制技术的仿真研究
章 穗,乔玉库,苏 威
(湖北工业大学电气与电子工程学院,湖北武汉 430068)
分析了系统谐波的危害,提出了有源电力滤波器抑制谐波的有效性,以单相并联型有源电力滤波器为背景,介绍了其工作原理并建立数学模型。详细分析了基于电压外环电流内环的单相并联型有源电力滤波器双环控制系统,并给出了电压外环以及电流内环PI控制参数的具体设计过程。最后通过MATLAB仿真对所设计的系统控制参数进行了验证。仿真结果表明,该种基于电压外环电流内环的双环PI控制器的单相并联型有源电力滤波器能保证直流母线电压的稳定,并对中低频带的谐波进行有效的补偿。
有源电力滤波器(APF);谐波补偿;双环PI控制
人们在广泛应用电能的同时,也给电网系统造成了严重污染,尤其是各类电力电子装置的使用给系统注入了大量的谐波,影响了系统的电能质量。有源电力滤波器(APF)是一种新型的谐波抑制装置,它能有效抑制系统的谐波电流,因此也得到了广泛的研究与应用。然而,目前国内外相关文献大多集中在对三相APF的研究上,对单相APF的研究还不够深入。本文在分析了单相并联型APF的工作原理及其数学模型的基础上,对单相并联型APF的双环控制技术进行了深入的研究。
1 单相并联型APF数学模型及其工作原理
图1给出了单相并联型APF的主电路拓扑结构,L表示交流侧并网电感,r表示回路电阻以及同一桥臂上下管死区等效电阻之和,Cdc表示直流母线电容,Rdc表示直流侧等效并联电阻。Uab表示桥式电路逆变输出电压,iF表示交流侧电流,idc表示直流母线电流,ic表示直流母线电容电流,Udc表示直流母线电压,io表示直流母线等效放电电流。Sa表示第一组桥臂开关管T1与T2的开关状态,Sb表示第二组桥臂开关管T3与T4的开关状态。
通过对上述简化电路模型分析,可以得到其数学模型为


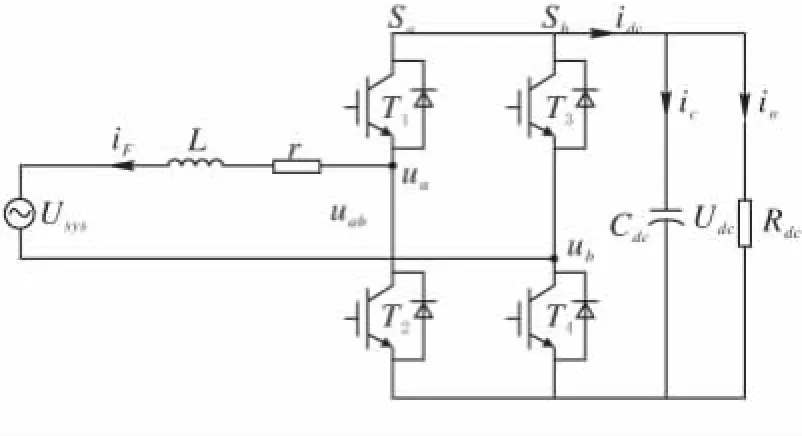
图1 单相并联型APF系统拓扑
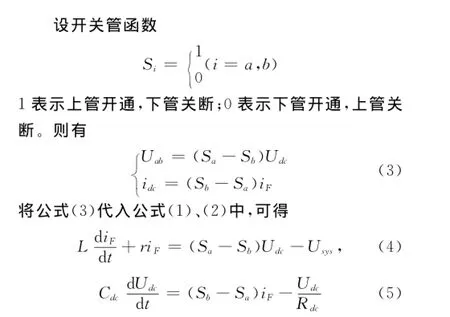
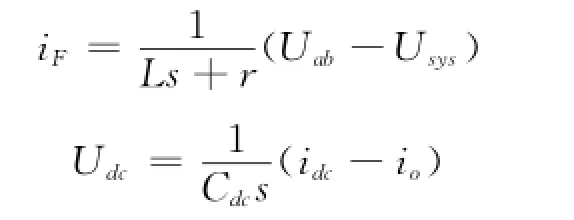
公式(4)、(5)即为单相并联型APF时域中精确数学模型。可以将APF发出的电流iF以及其直流母线电压Udc看作是控制系统的两个状态变量,通过控制开关函数Sa与Sb的值便可控制这两个状态变量,即可以实现直流母线电压的恒定以及系统谐波电流的补偿。
对公式(3)、(4)进行拉氏变换得到s域模型为
将上述数学模型用结构框图表示,见图2。
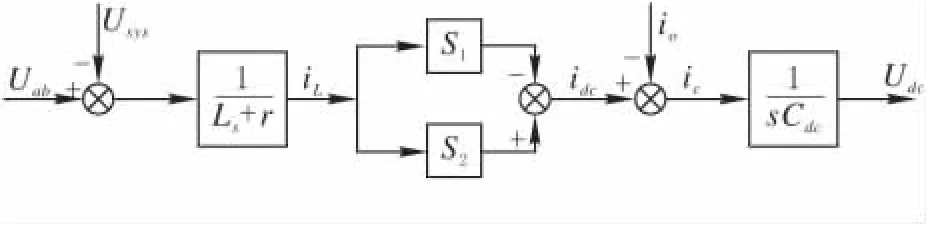
图2 被控对象的结构框图
2 双环PI控制系统的设计
上节中已经得了单相并联型APF的数学模型,并且给出了被控对象的结构框图。通过对其模型分析可知,APF性能的好坏关键在于对交流侧电感电流iF以及直流母线电压Udc的控制。本节先从整体出发,给出了电压外环电流内环系统的整体控制结构(图3)。
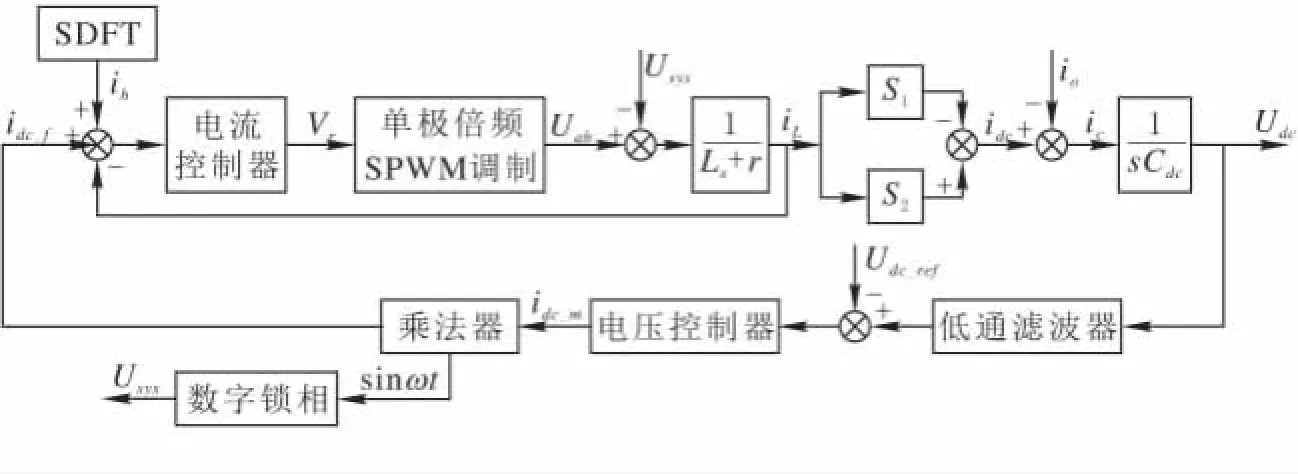
图3 单相并联APF系统控制框图
用SDFT算法提取出负载电流iload中的谐波电流作为指令,与AFP并网电感所发出的补偿电流iF做差,得到电流偏差信号,经过电流控制器后得到待调制的电压信号Vr,然后经过单极倍频SPWM调制输出电压Uab,Uab与Usys的电压差作用在输出电感上便可控制其进行谐波补偿。该过程中电流控制器可谓是有源电流滤波器的灵魂,电流控制器参数的设计将直接影响装置的谐波补偿效果。考虑到APF在实际工作时,其直流母线电压必须要高于系统电压幅值,并且在系统运行过程中要保证其母线电压不会因为线路、开关管或是放电电阻等损耗而逐渐降低,因此也必须对直流侧电压进行控制。APF在进行谐波电流补偿时,直流侧电压必然会不停的波动,但是这种波动是周期性的,其电压平均值并未变化,只有当它与电网发生有功交换时才会导致母线电压平均值的变化,因此对直流侧电压的控制并非瞬时值控制,而是根据能量守恒原理对其平均值进行控制。对直流母线电压Udc进行低通滤波处理得到其直流平均分量,然后与直流电压指令Udc_ref做差,得到电压偏差信号,经过电压控制器后得到对应母线电压的电流幅值idc_m,再与经过对系统电压Usys锁相后的到得sinωt相乘便可得到有功电流指令idc_ref,将该指令与电流内环的谐波电流指令叠加,经过电流内环控后即可控制并网电感的谐波电流和有功电流,从而实现在补偿谐波的同时也保证对直流母线电压的控制效果。下面将按照“先内环,后外环”的原则对双环PI控制参数进行设计。
2.1 电流内环PI控制器的设计
根据第2节建立的数学模型,给出单相并联型APF的电流内环控制框图如图4所示。
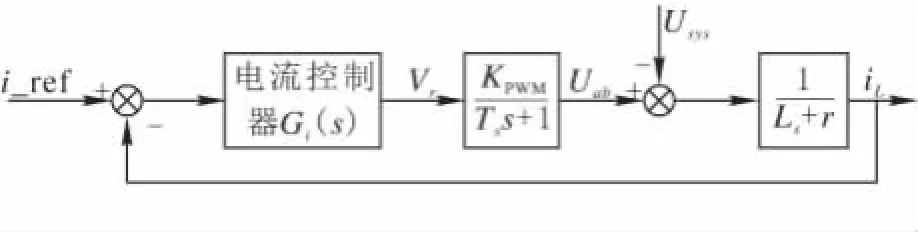
图4 电流内环控制框图
其中,KPWM/(Tss+1)表示单极倍频SPWM波调制环节,KPWM为调制环节的增益,Ts为系统的采样周期;iref表示电流内环的输入指令,电感电流iL为反馈量;Gi(s)表示电流PI控制器,假设其传递函数

其中,KiP为比例系数,KiI为积分系数,τi=KiP/KiI。
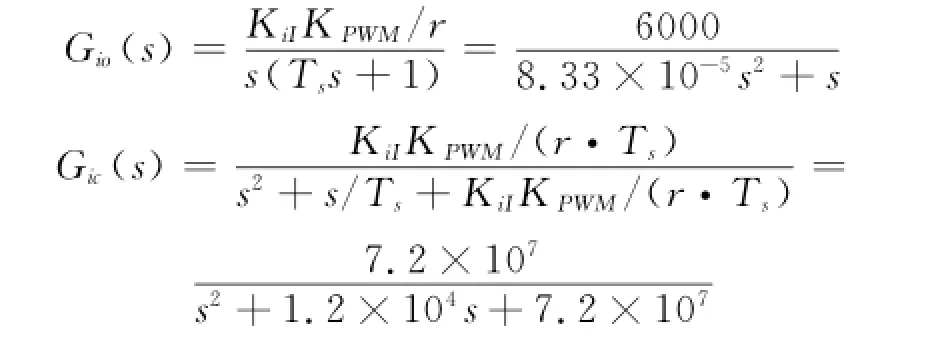
本文中,并网电感L=1.8mH,线路等效电阻r=0.1Ω,采样频率为12kHz,若假设KPWM=1,采用二阶最佳系统设计原则,不考虑系统电压的扰动,可以算出电流内环PI控制参数KiP=10.8、KiI=600。从而可得到电流内环的开环传递函数与闭环传递函数分别为
2.2 电压外环PI控制器的设计
完成了对电流内环的设计后,可以将图3所示的双环系统简化成一个单闭环系统,其结构框图见图5。
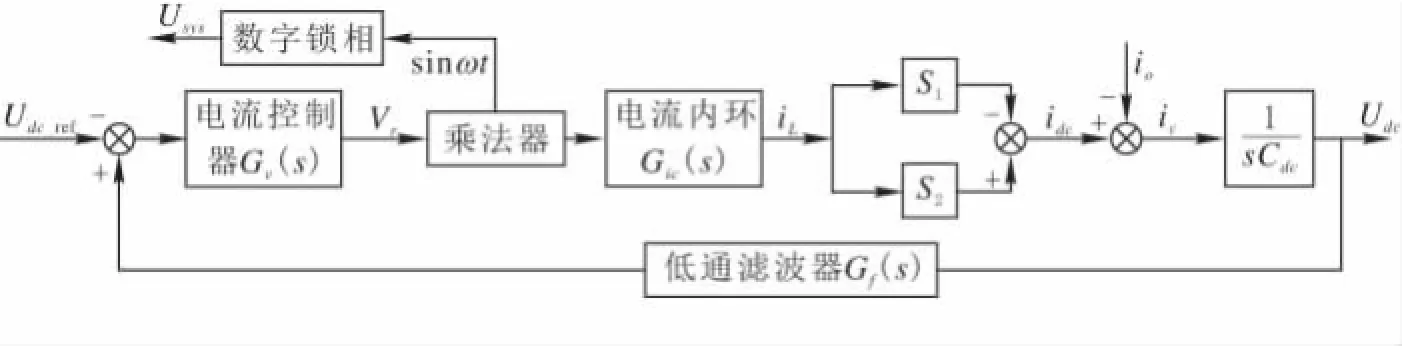
图5 电压外环控制框图
其中,低通滤波器Gf(s)=1/(Ts+1),T为电网电压周期,对直流侧电压经过滤波后所得的平均值与直流电压指令做差送入电压控制器Gv(s)进行调节,得到控制有功电流指令幅值idc_m,该幅值与对电网电压锁相后得到的sinωt相乘便可得到有功电流指令。
对比上节中对电流环的设计可知,内环的电流响应速度要远大于外环电压的响应速度,出于简化分析,可假设Gic(s)=1,即电压外环控制器的输出有功电流指令便对应交流侧电感电流iL。图5中,由于受到开关函数的影响,电感中的有功电流与直流电压之间的关系是非线性的,不便于电压控制器的设计,下面从能量守恒的角度对其模型进行简化分析,有
不考虑扰动变量Io的影响,可将图5的电压外环控制进一步简化,得到电压控制(图6)。
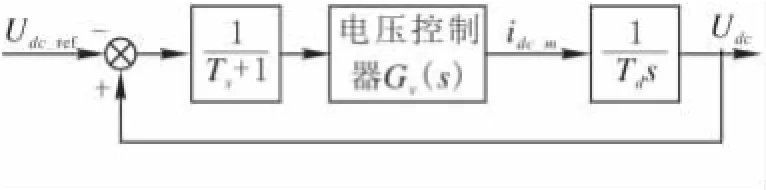
图6 简化后系统直流电压控制框图
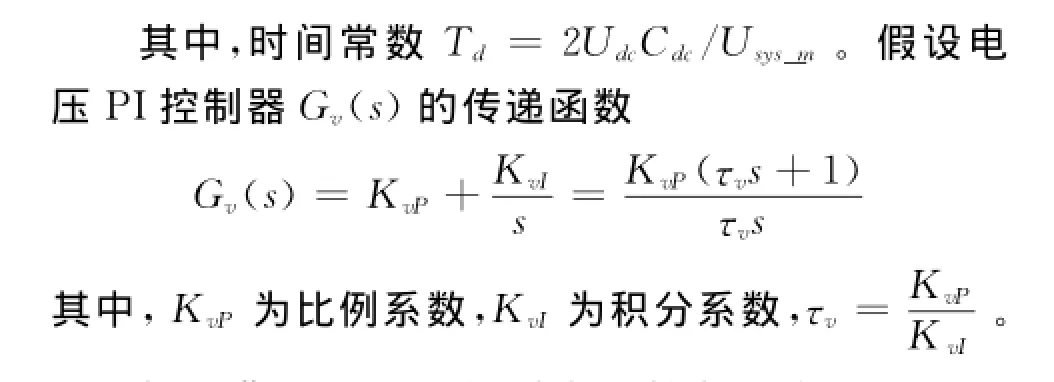
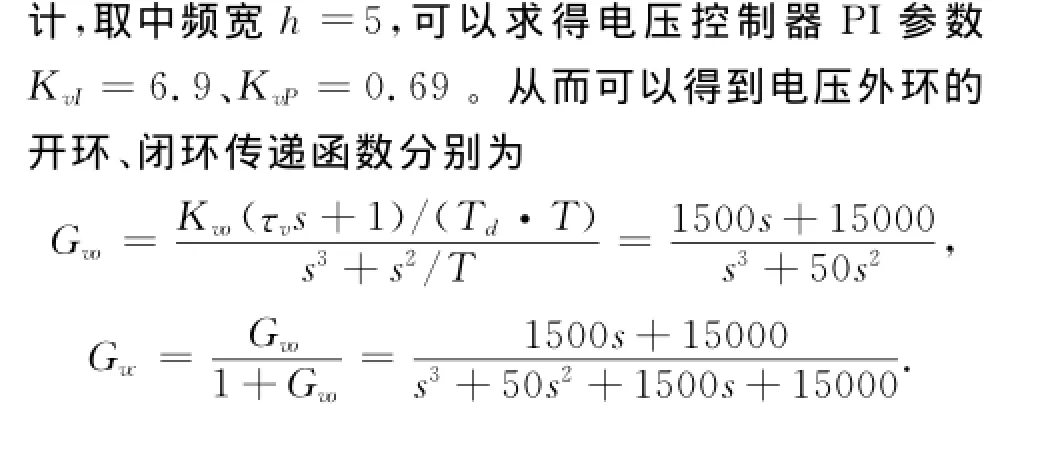
按照典型Ⅱ型系统对电压控制器参数进行设
3 系统仿真
上一小节中,已经完成了基于PI控制的电压外环电流内环双环系统控制器的设计,本节将通过MATLAB软件搭建系统模型,对前面章节设计的参数进行仿真验证。图7为单相并联型APF的系统的仿真图。系统仿真参数如下:系统电压Usys频率为50Hz、有效值为220V;非线性负载由不控整流经μs滤波后接电阻构成,其中iL,isys;isys并网滤波器的内电感iL,外电感isys,高频滤波电容isys,阻尼电阻R1=7.5Ω;直流母线电容Cdc=9 400μF,其初始电压设为310V。
图8为系统双环PI控制部分的仿真图。其中,直流电压指令为380V,由初始值为310V、斜率为250的斜坡信号Ramp实现,并通过xf2模块将其幅值限制在380V,这样可以实现直流侧电压软启动,防止母线电压超调量过大。Udc_filter表示时间常数为基波周期T的一阶低通滤波器,用于滤除直流母线电压Udc的二次纹波,为了简化分析特地将其放在电压外环的前向通道上。Udc_pi_con表示电压控制器,其参数与之前设计的一致,分别为KvP=0.69、KvI=6.9。sin(ωt)即为系统电压Usys的相位,实验中可通过数字锁相得到。直流电压指令与反馈电压做差后得到的电压偏差信号,经过电压控制器调节,然后与sin(ωt)相乘便可得到有功电流指令。将有功电流指令与通过SDFT模块检测到的谐波电流指令进行叠加,得到总的电流指令,与实际补偿电流iF做差便可得到电流偏差信号。iF_pi_con即表示电流内环PI控制器,其PI参数分别为KiP=10.6、KiI=600。电流偏差信号通过电流内环的PI控制器调节,得到谐波电压信号,然后与前馈的系统电压Usys信号叠加得到待调制的电压信号,再经过SPWM调制,便可得到各开关管的驱动信号,控制逆变桥的输出电压,从而实现谐波补偿与母线电压控制。
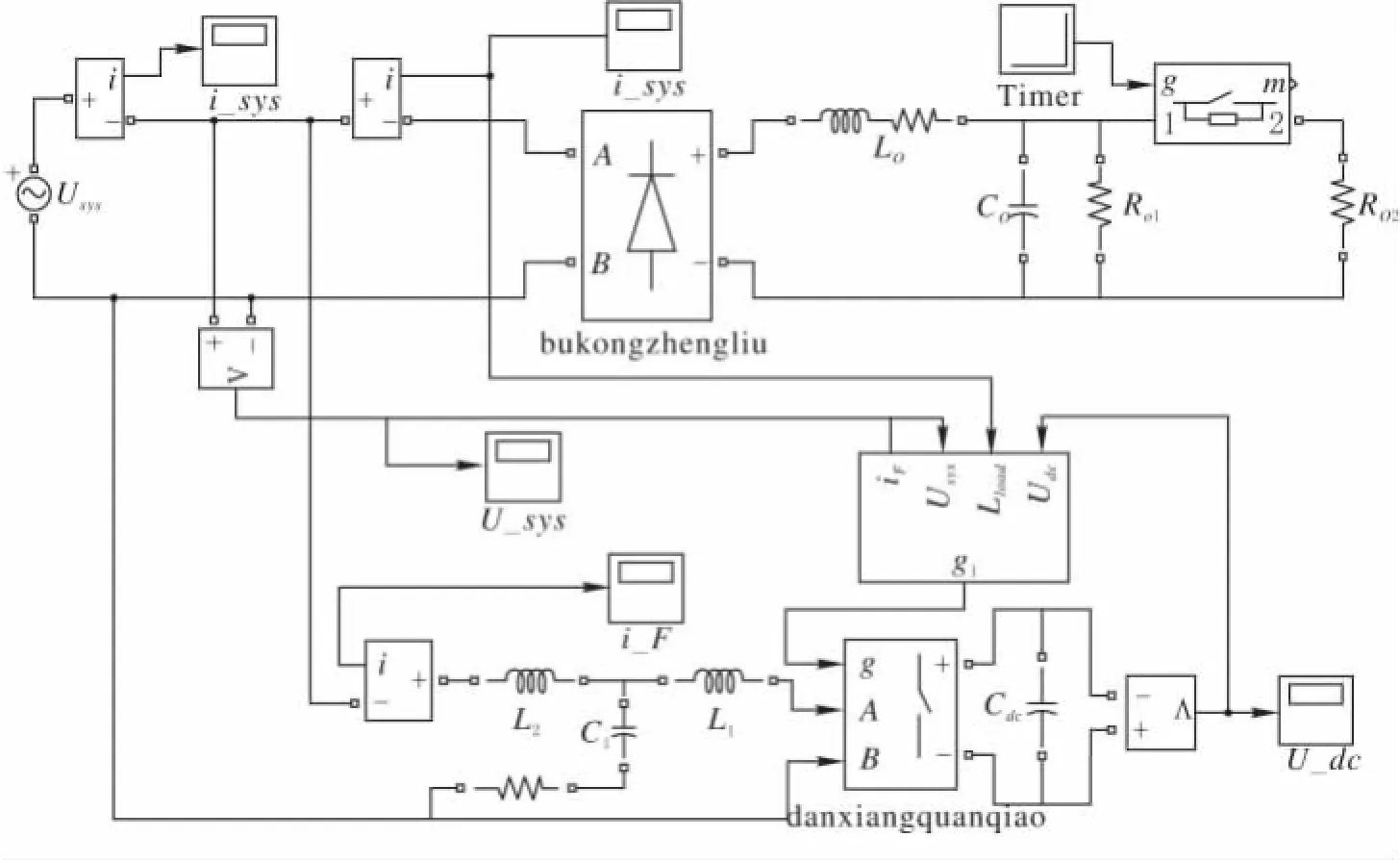
图7 单相并联型APF的系统仿真图
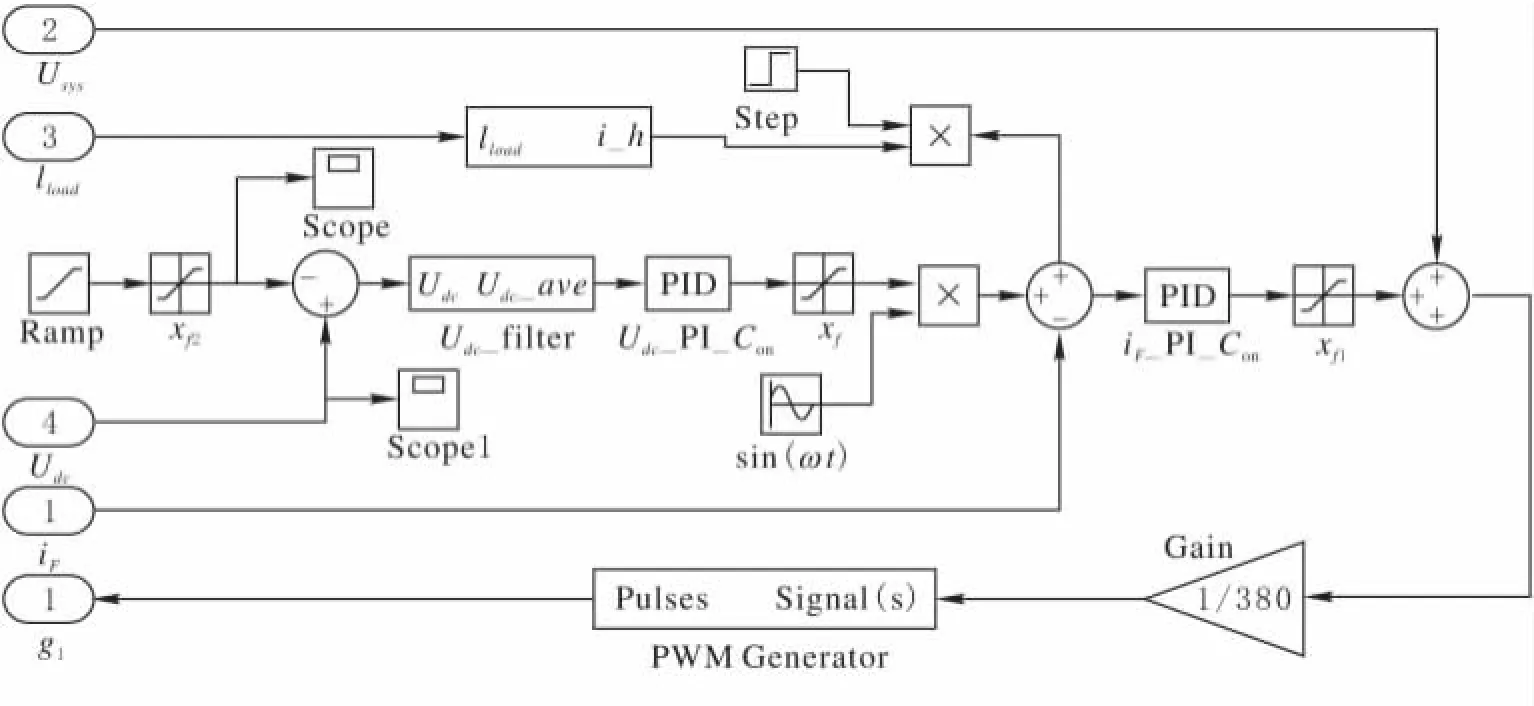
图8 双环系统控制模块框图
图9为系统直流母线电压波形,其中蓝线表示直流电压指令,为一斜坡函数;棕线表示输出直流电压波形。

图9 直流母线电压波形
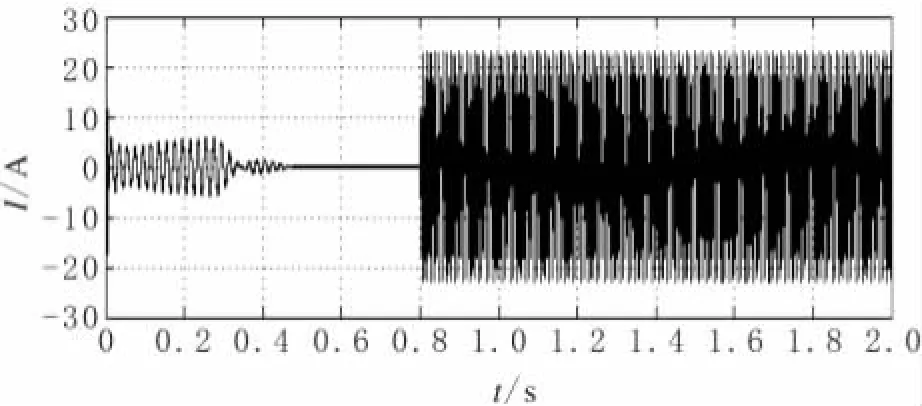
图10 系统补偿电流波形
图10为交流侧电感电流波形。由图可以可出,从t=0s~t=0.5s这段时间内,系统通过高频整流,将直流侧电压升至380V,由于采用了软起动的方式,直流侧电压的超调量较小。在t=0.8s时,系统开始进行谐波补偿,直流母线电压会有脉动,但纹波幅值不超过5V。可见,直流母线电压控制效果很理想。
基于电压外环电流内环双环PI控制系统,图11分别给出了单相并联型APF投入运行后的负载电流波形、补偿电流波形以及补偿后的系统电流波形。
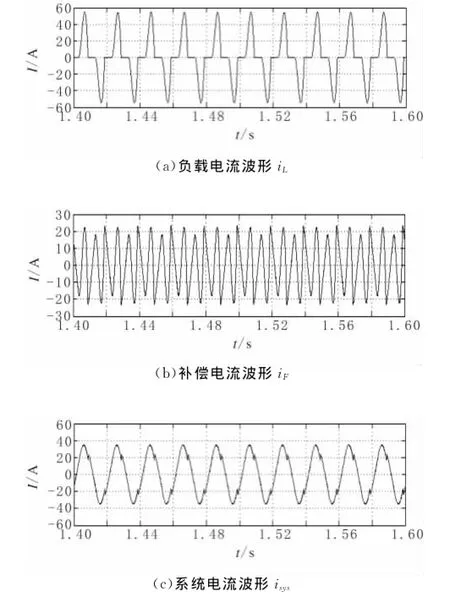
图11 基于PI控制器各电流稳态波形
为进一步研究其补偿效果,对负载电流以及系统电流的频谱分析见图12。
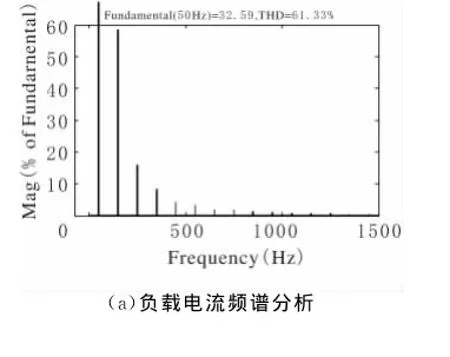
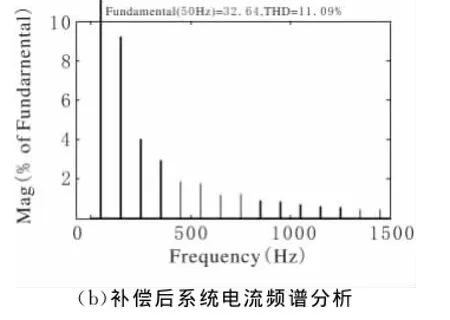
图12 电流频谱分析图
由图可知,采用该种基于电压外环电流内环双环PI控制的单相并联型APF对系统进行谐波补偿后,系统电流的THD由61.33%降为11.09%,极大改善了系统的电能质量。当然,由于单纯的PI控制并无法实现对交流信号的无静差跟踪,在低频段,其补偿效果还可以接受,但是到了高频段,其补偿效果则很不理想。要实现高频谐波的精确补偿还需对电流控制方法进行改进。
4 结束语
本文以改善电能质量课题为背景,详细分析了单相并联型有源电力滤波器的工作原理及其数学模型,提出了基于电压外环电流内环的双环控制思想,给出了电压外环以及电流内环PI控制参数的具体设计过程。最后通过MATLAB仿真对所设计的系统控制参数进行了验证。仿真结果表明,该种基于电压外环电流内环的双环PI控制器的单相并联型有源电力滤波器能保证直流母线电压的稳定,并对中低频带的谐波进行有效的补偿,具有明显的工程指导意义和实用价值。
[1] 王兆安,杨 君,刘进军.谐波抑制和无功功率补偿[M].第一版.北京:机械工业出版社,2004.
[2] 何 俊,彭 力,康 勇.PWM逆变器PI双环模拟控制技术研究[J].通信电源技术,2007,24(03):1-3.
[3] 李 直.单相并联型有源电力滤波器的研究[D].武汉:华中科技大学图书馆,2009.
[4] 杨 君,王兆安.并联型电力有源滤波器控制方式的研究[J].西安交通大学学报,1995,29(03):97-102.
[5] 俞秀峰.有源电力滤波器谐波电流闭环控制策略的研究[D].武汉:华中科技大学图书馆,2009.
[责任编校:张岩芳]
Simulation of Single-Phase Shunt APF with Loop Control
ZHANG Sui,QIAO Yu-ku,SU Wei
(School of Electrical and Electonic Engin.,Hubei Univ.of Tech.,Wuhan 430068,China)
This paper first analyzed the harm of harmonics,pointed out the effectiveness of the active power filter used to inhibit harmonics.Using a single-phase parallel active power fliter as a example,it also introduced how it works and established its mathematical model.It then analyzed a double loop control system of the single-phase parallel active power fliter based on a model of the inner loop of voltage combining with its outer loop of current in detail,and described the specific design process of the parameter PI of inner loop of voltage and the outer loop of current.It finally tested the parameters designed using the simulink of matlab.The results show that the double loop control system of the single-phase parallel active power fliter based on a model of the inner loop of voltage combining with its outer loop of current can ensure the stability of the DC bus voltage and compensate the harmonics of low and medium frequency band effectively.
APF;Harmonic compensation;Double-loop PI control
TM 714
A
1003-4684(2014)02-0060-05
2013-11-04
章 穗(1958-),男,湖北武汉人,湖北工业大学副教授,研究方向为电气自动化
