Fluxgate Magnetometer with Low-Cost and High-Resolution Based on ARM*
2014-09-08WANGYongboLIUShibinFENGWenguangLIQuanheng
WANG Yongbo,LIU Shibin,FENG Wenguang,LI Quanheng
(School of Electronics and Information,Northwestern Polytechnical University,Xi’an 710072,China)
Fluxgate Magnetometer with Low-Cost and High-Resolution Based on ARM*
WANG Yongbo,LIU Shibin*,FENG Wenguang,LI Quanheng
(School of Electronics and Information,Northwestern Polytechnical University,Xi’an 710072,China)
This paper describes a dual-core fluxgate magnetometer based on feedback technique which reaches 16-bit resolution with a 12-bit A/D and a Programmable Gain Amplifier(PGA).The amplitude of the sensor’s output signal is real-time controlled by the PGA and is adapted to the input range of the A/D converter.Experiments show that the detection range of the magnetometer is±62 000 nT,the resolution is 1.9 nT and the linearity is 2.4× 10-4.Along with characteristics of low cost and small size,it has good application prospects in certain fields.
fluxgate magnetometer;programmable gain amplifier;12-bit A/D;high-resolution
磁通门是利用软磁材料磁化饱和时的非线性来测量外磁场的一种传感器[1],因其具有分辨率高(可达10-11T)、测量弱磁场的范围宽(10-3T以下)等优点[2],在地质勘探、宇航工程、国防科技等领域得到了广泛应用[3]。近年来,电子技术的发展为磁通门磁强计提供了数字化方案,使磁强计在体积、功耗、温度稳定性等方面有了很大提高[4]。闭环数字磁强计一般由磁通门探头、采样A/D、处理单元、反馈D/A等构成,其精度主要取决于反馈回路的D/A转换器,采用高分辨率的D/A芯片可以有效提高系统性能。为了与反馈D/A匹配,系统前端采样通路中需要使用高分辨率的A/D,例如:文献[5]前端采样使用了C8051F064单片机内集成的16 bit A/D,反馈端使用了16 bit D/A芯片DAC8552;文献[6]前端采样使用了16 bit A/D芯片AD974,反馈端使用了16 bit D/A芯片AD660。同时,系统要求A/D转换速度较快,然而高速、高分辨率A/D价格较高,研究采用低位A/D实现高分辨率效果,对磁强计成本的降低具有实用意义。
本文设计了一种基于ARM的磁强计,通过使用12 bit A/D,结合可编程运算放大器(Programmable Gain Amplifier,PGA),实现了16 bit分辨率,匹配了16 bit反馈D/A,降低了系统成本。
1 磁强计系统结构
磁通门磁强计系统结构如图1所示。在激励电流作用下,磁通门次级线圈产生携带有外磁场信息的电压信号,经过可编程运放,由高速A/D采样后送入微控制器,经相敏整流、积分等运算得到反映外磁场的直流数字量[7],并由D/A转换为电压信号经反馈回路输入到磁通门次级线圈,产生反馈磁场,形成闭环系统[8]。

图1 磁强计系统结构框图
系统上电初始,磁通门输出信号幅值很大,调整可编程运放增益为×1,磁通门输出信号不会超出A/D输入范围;随着反馈的建立,磁通门工作在零磁场附近,输出信号幅值变小,调整可编程运放增益为×16,放大输出信号幅值与A/D动态范围相匹配,从而实现了A/D分辨率的提高。
2 磁强计硬件实现
选用基于Cortex-M4内核的STM32F303VCT6芯片作为控制单元,设计了系统硬件电路,结构如图2所示,因三轴磁强计三路信号处理通道相同,图中仅给出了一路信号处理电路的结构。

图2 磁强计系统硬件电路示意图
STM32F303VCT6是32 bit ARM微控制器,工作频率高达72 MHz,芯片内集成了2个12 bit D/A、4个可编程运放、4个12 bit高速A/D(5MSPS)、多个定时器和USART、SPI等接口[9],完全可以满足系统需求。DAC8555是四通道并行转换芯片,具有1LSB微分非线性,10 μs建立时间[10],保证了系统精度。
该磁强计使用正弦波作为激励,由STM32F303的D/A输出16 kHz正弦信号,经功率放大后驱动磁通门初级线圈。磁通门输出信号经谐振放大、隔直后[11],送入STM32F303。
配置STM32F303内的可编程运放和12 bit A/D为级联结构。STM32F303使用串行SPI接口向DAC8555发送积分结果,再通过运放和反馈电阻输送到磁通门次级线圈,完成闭环控制。
STM32F303使用USART串口与上位机通信,MAX232芯片负责电平转换。
3 磁强计软件设计
软件部分主要完成系统初始化、信号采样、增益控制、数据处理、反馈以及数据输出等功能。系统软件流程如图3所示,图3(a)为系统总体流程,图3(b)为中断处理流程。
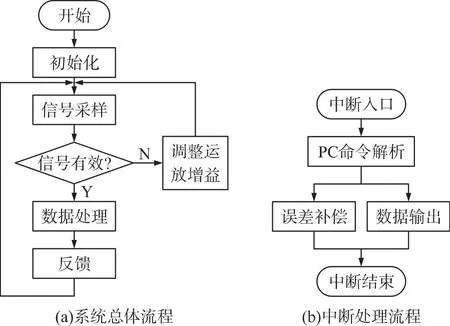
图3 磁强计系统软件流程图
初始化主要包括设置系统时钟,初始化DMA通道、SPI接口、定时器,配置D/A产生正弦激励等。
3.1 可编程运放增益调节
程序每次采样100个点(1个激励周期的采样点数),再进行后续处理。可编程运放初始增益为×1,使用A/D自带的2个窗口看门狗监测采样信号的幅值,以调整运放增益。设置看门狗1的阈值略大于反馈建立后磁通门输出信号的幅值,设置看门狗2的阈值远大于看门狗1的阈值但略小于A/D输入量程。当采样信号幅值处于看门狗2的阈值和看门狗1的阈值之间时,认为采样信号有效,进行相敏整流、积分运算并反馈;当采样信号幅值小于看门狗1的阈值时,表明反馈抵消了大部分外磁场,此时调整运放增益为×16,A/D再次采样则为有效信号;当采样信号幅值超出了看门狗2的阈值时,则表明外磁场突变超出了磁强计量程,此时恢复运放增益为×1。该方法保证了磁通门输出信号经运放后与A/D动态范围相匹配,在反馈建立后提高A/D分辨率为16 bit[12]。
3.2 三轴磁强计误差补偿
三轴磁强计存在正交误差、灵敏度误差、零位误差,需要进行补偿。采用文献[13]提出的“改进的最小二乘椭球拟合算法”求解补偿系数矩阵。假定磁强计输出的原始值用向量hs表示,无误差的理论值用向量ht表示,其关系数学模型为

式中Kc为下三角矩阵,表示由3个轴的灵敏度不一致和非正交性引起的误差,Bc表示由磁强计零位引起的误差。在恒定磁场空间,当磁强计任意旋转时,理论值ht的轨迹位于一个已知球面上,即

式中H表示磁场强度。将式(1)代入式(2)可整理出一般椭球方程,磁强计误差补偿转变为椭球拟合问题。对多组磁强计输出值进行拟合,可求解出系数矩阵Kc和Bc。
在恒定地磁场环境下,将磁强计在空间一点任意旋转,期间将磁强计三轴积分数据通过串口发送到PC机,在PC机上利用MATLAB软件编写椭球拟合算法[14],求解补偿系数矩阵,最后磁强计通过串口接收PC机求解矩阵结果,写入Flash。
4 实验及结果
实验测试了使用最小二乘拟合算法对磁强计进行补偿的效果。在强度为0.528高斯的均匀磁场环境中,任意旋转经过误差补偿的磁强计,记录三轴输出数据,利用MATLAB计算总磁场强度,结果如图4所示。

图4磁强计三轴磁场分量及总磁场强度
图4 中,下方三条曲线分别为磁强计3个轴的磁场分量,最上方曲线为总磁场强度,曲线较平直,最大偏差为0.053%,补偿效果较好。
经过上述补偿之后,磁强计3个轴特性一致。实验测定了磁强计一个轴的非线性,将磁强计置于磁屏蔽器(中国钢铁总院制,Φ内100 mm×300 mm)的长螺线管内(中国钢铁总院制,Φ内80 mm ×280 mm,50 000 nT内非线性度为0.01%)[15],磁强计被测轴与线圈轴线重合,通过调节螺线管通电电流可产生一组均匀磁场。实验采用磁通门磁强计CTM-6W(中国计量科学研究院制,分辨率0.1 nT)作为磁场参考值。测量结果如图5所示。
图5中,圆点为测量数据,直线为拟合直线,可以看出,磁强计输出与外磁场成线性关系,线性度为2.4×10-4。螺线管产生的磁场强度范围约为±62 000 nT,对应磁强计输出数字量为±32 768,磁强计分辨率约为1.9 nT。
实验测定了磁强计系统的频率响应特性。将磁强计置于磁屏蔽器内的长螺线管中,用函数信号发生器(Agilent 33220A)产生正弦激励信号,经功率放大器(HAS 4011)放大后送入螺线管产生交变磁场。调节激励频率,记录磁强计输出,测得系统频率响应如图6所示,系统的-3 dB带宽为96 Hz。
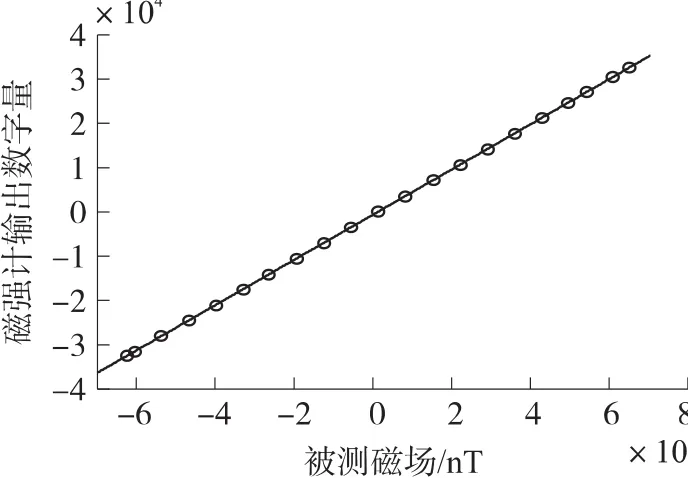
图5 磁强计输出随螺旋线圈电流变化曲线
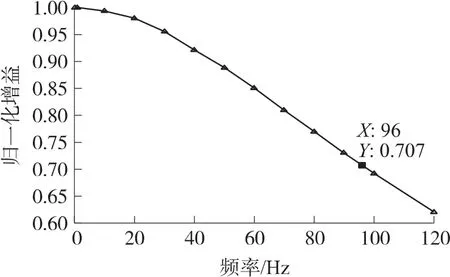
图6 系统频率响应
5 结论
本文设计了一种三轴数字磁强计,在前端采样通路中使用12 bit A/D,结合可编程运放,实现了16 bit分辨率效果。实验表明磁强计量程为±62 000 nT,分辨率为1.9nT,线性度为2.4×10-4,-3 dB带宽为96 Hz,性能较好。基于ARM设计的磁强计系统,较传统模拟磁强计提高了集成度并改善了温度性能,ARM的精简指令集较单片机系统优化了编程且增加了系统稳定性,较DSP系统降低了成本。综合考量,基于ARM的磁强计具有广阔的应用前景。
[1]Ripka Pavel.Magnetic Sensors and Magnetometers[M].Boston: Artech House,2001:75-78.
[2]Ripka Pavel.Advances in Fluxtate Sensors[J].Sensors and Actuators A,2003,106:8-14.
[3]郝建伟,娄文忠,王永强,等.基于弹载测速的微型磁通门集成系统研究[J].传感技术学报,2008,21(2):369-372.
[4]Cerman A,Ripka Pavel.Towards Fully Digital Magnetometer[J]. Sensors and Actuators A,2003,106:34-37.
[5]冯文光,刘诗斌.闭环反馈式数字磁通门传感器[J].传感器与微系统,2009,28(9):79-85.
[6]姚振宁,刘胜道,杨明明.基于ARM的三端式磁通门传感器[J].仪表技术与传感器,2011(3):3-5.
[7]Forslund Ake,Belyayev Serhiy,Ivchenko Nickolay,et al.Miniatur-ized Digital Fluxgate Magnetometer for Small Spacecraft Applications[J].Measurement Science and Technology,2008,19.
[8]刘诗斌.微型智能磁航向系统研究[D].西安:西北工业大学,2001.
[9]STMicroelectronics.RM0316 Reference manual[OL].www.st.com.
[10]Texas Instruments.DAC8555 Reference manual[OL].www.ti.com.
[11]尹春晓.磁通门传感器及其模拟处理电路的研究[D].吉林:吉林大学仪器科学与电气工程学院,2008.
[12]STMicroelectronics.AN2834-如何在STM32F10xx上得到最佳的ADC精度[OL].www.st.com.
[13]冯文光,刘诗斌,李菊萍,等.三轴磁航向传感器误差补偿[J].应用科学学报,2013,31(2):154-158
[14]罗建军,杨琦.MATLAB教程[M].北京:电子工业出版社,2005,116-130,188-195.
[15]刘昭元,刘诗斌.基于DSP的数字磁通门传感器设计[J].传感技术学报,2009,22(9):1280-1283.

王永波(1987-),男,河北石家庄人,西北工业大学电子信息学院硕士研究生,研究方向为嵌入式系统设计,wangyongbo2010@126.com;

刘诗斌(1960-),男,河南巩义市人,西北工业大学电子信息学院教授,博士生导师。长期从事无人机传感器系统的研究,研究方向为磁场和压力测量,智能传感器系统,微电子和计算机应用,liushibin@nwpu.edu.cn。
基于ARM的低成本高分辨率磁通门磁强计*
王永波,刘诗斌*,冯文光,李泉衡
(西北工业大学电子信息学院,西安710072)
基于双铁心磁通门负反馈工作原理,设计了一种数字磁通门磁强计。利用可编程运算放大器实时调节磁通门输出信号的幅值,再经高速12 bit A/D转换成数字信号,用ARM微控制器完成相敏整流和积分运算,用高精度16 bit D/A输出反馈信号,构成闭环系统。实验测试表明,该磁强计的量程为±62 000 nT,分辨率为1.9 nT,线性度达到了2.4×10-4。采用可编程运放结合12 bit A/D实现16 bit分辨率的设计方案,降低了磁强计成本,具有工程应用前景。
磁通门磁强计;可编程运放;12 bit A/D;高分辨率
TP212.13
A
1004-1699(2014)03-0308-04
2013-11-24修改日期:2014-02-24
C:7230;7310L
10.3969/j.issn.1004-1699.2014.03.006
项目来源:国家自然科学基金项目(60874101);教育部博士点基金项目(20126102110031)
猜你喜欢
杂志排行

传感技术学报的其它文章
- Design and Implementation for Diarrheic Shellfish Poison Detection Based on Electrical Cell-Substrate Impedance Sensing*
- A Design of ECG Signal Monitoring System Based on Intelligent Terminal
- A Study of Multi-Channel sEMG De-Noising and Aliasing Removal*
- Analysis of Temperature Characteristic and Design of Interface ASIC Based on Ring Schottky Diode for MEMS Gyroscope*
- Fabrication and Characteration of NiCr-NiSi Thin Film Thermocouples on CFCC-SiC Substrate*
- Design and Fabrication of a Ultra Wideband Capacitance MEMS Switch