雷达伺服控制安全性和可靠性的若干技术设计
2014-09-08吴婉兰陈施华
吴婉兰,陈施华,刘 丽
(中国船舶重工集团公司第七二四研究所,南京 211153)
雷达伺服控制安全性和可靠性的若干技术设计
吴婉兰,陈施华,刘 丽
(中国船舶重工集团公司第七二四研究所,南京 211153)
介绍了雷达伺服控制安全性和可靠性的若干技术设计,主要包括安全开关技术设计、电机报闸技术设计、电气限位技术设计、稳定平台防倾倒技术设计及跟踪引导数据外推插值预报算法。具体介绍了相关的电讯设计及数据处理方法,并给出了部分实际应用结果。
伺服系统;稳定平台;安全开关;报闸;电气限位
0 引 言
伺服系统是雷达的重要组成部分。当伺服系统出现故障不能工作时,雷达系统随之失去功效,故现代雷达对伺服系统的可靠性提出了很高的要求。随着技术的进步,交流伺服系统的可靠性达到了相当高的水平,但失效和故障仍是不能完全避免的。当伺服控制出现故障时,控制系统应立即停止当前运动或直接切断电源并报警,将安全风险降至最低,确保设备安全,避免可能造成的安全隐患。这就需要机电控制系统应具有可靠的故障检测方法及完善的故障处理措施。
1 安全开关技术设计
为保障维修人员的安全,雷达天线稳定转台上设有安全开关。当安全开关处于“断”位置时,天线转台控制模块禁止转台运动并发出相应的故障报警信息;当安全开关处于“通”位置时,天线转台方可正常运动。安全开关设计的有效性涉及维修人员的人身安全,必须采取多重措施确保安全开关断开时天线转台能够停止运动。如图1所示,在硬件设计时,采用固态继电器K1控制电机驱动系统三相动力电Ma、Mb和Mc。当安全开关断开,固态继电器切断驱动系统动力电,电机停止运动;同时,控制模块使用安全开关状态信号(SAFESWITCH_STATUS)控制驱动系统使能。安全开关断开时状态信号SAFESWITCH_STATUS为高电平,此时驱动系统使能无效,即使固态继电器K1损坏,电机依旧会停止运动,确保维修人员的人身安全。
2 电机报闸技术设计
舰载雷达稳定方式现大多采用方位-俯仰型两轴稳定或方位-纵摇-横摇三轴稳定。俯仰轴、纵摇轴和横摇轴一般采用带报闸的驱动电机,当稳定平台不工作时可确保俯仰轴、纵摇轴和横摇轴稳定在水平位置而不倾倒。当稳定平台工作时,必须首先开报闸,然后驱动电机旋转;若电机报闸未打开,而电机开始旋转,则电机的报闸会很快磨损报废,所以电机的报闸检测电路必须可靠。
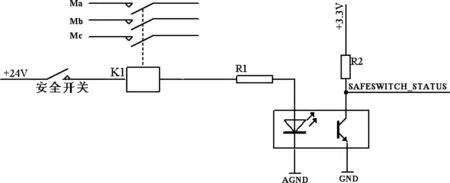
图1 安全开关设计原理图
图2中,M为电机,当开报闸信号OPEN_LOCK有效时(高电平),继电器K1闭合,电机报闸A端施加24V驱动电压,报闸B端接绕线电阻R4(功率8~10W)。若报闸打开,报闸检测信号LOCK_CHECK为低电平,此时控制系统使能信号有效,驱动电机工作;反之,控制系统使能信号无效,电机不工作。
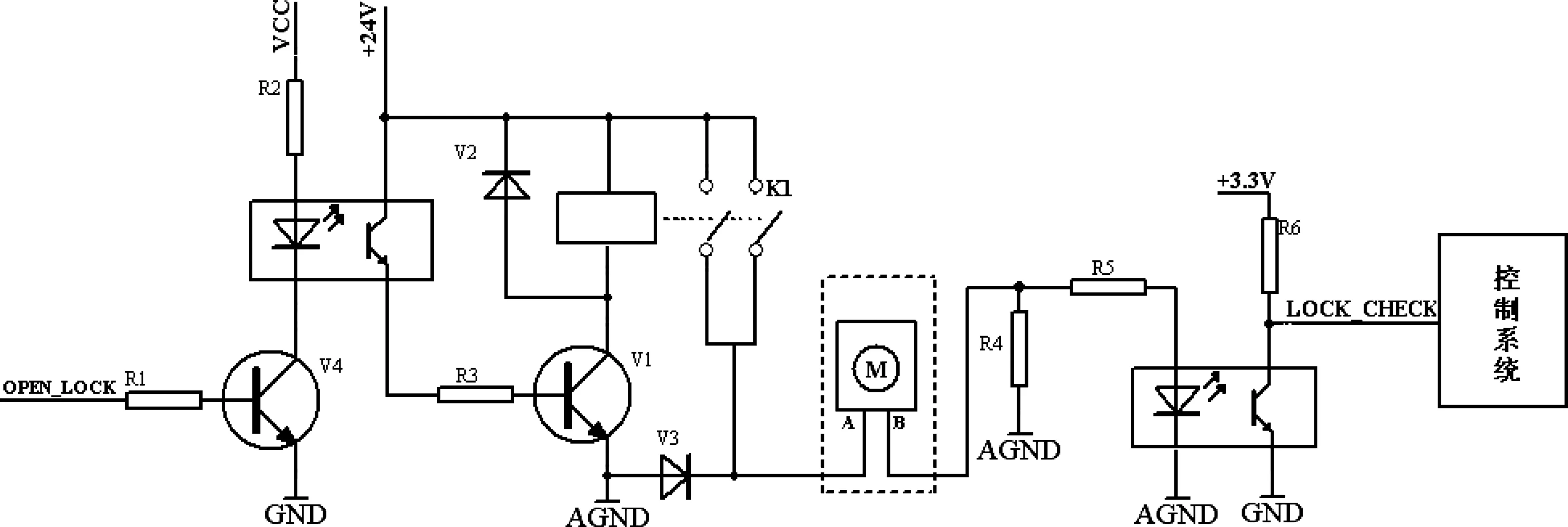
图2 电机报闸信号检测原理图
3 电气限位技术设计
对于运动范围有限的机械系统,为了防止在伺服控制出现故障时机械运动超出运动范围,造成设备损坏,必须设计限位保护装置,包括电气限位和机械限位缓冲器。当伺服系统出现故障且机械系统运动至电气限位位置时,控制系统立即进行制动,随即切断电机驱动,使机械系统以尽可能小的惯量冲击机械限位缓冲器。图3中,电气限位传感器采用欧姆龙E2E-X1R5E1型接近开关。当电气限位信号XW_Signal为高电平时,表示机械系统已运动至电气限位位置,此时控制系统立即进行电气制动,随即切断电机驱动,使电机停止工作。
在实际工作中,如果电气限位传感器损坏,则限位保护装置失效,机械运动还有可能超出运动范围,造成设备损坏。为了防止上述情况出现,在实际运用中,同时使用机械运动测角传感器的位置信号进行判断。当测角位置连续超出限位位置时,控制系统同样进行电气制动、切断电机驱动,使电机停止工作。

图3 电气限位检测原理图
4 稳定平台防倾倒技术设计
舰载型警戒雷达稳定平台控制一般采用平台罗经的纵摇和横摇信号作为闭环控制的给定值。平台罗经的纵、横摇信号由于传输干扰等原因时会出现时间长短不一、幅值大小不定的突跳。这种不确定性的突跳给闭环控制带来很大的阶跃输入,造成闭环控制的剧烈振荡,甚至导致稳定平台失控倾倒,而一般的平滑滤波并不能取得令人满意的效果。本文采用的限位恒速跟随法可有效解决上述问题,具体方法:在平台罗经纵、横摇信号瞬时发生突跳时,控制系统给定值不是直接采用突跳信号,而是从当前位置以较小的恒定速度逼近突跳信号。若给定信号逼近运动范围边界时,给定信号保持在边界值不再递增(给定值限位)。当突跳信号回落时,给定信号同样以较小的恒定速度回落。图4中,data1为舰船横摇信号,当data1发生突跳时,采用限位恒速跟随法得到data2信号。 data2在位置上是连续的,消除了data1的位置阶跃突跳,只是在突跳的上、下沿有着较小的速度波动,从而避免了位置闭环控制的剧烈振荡,确保稳定平台不会失控倾倒。
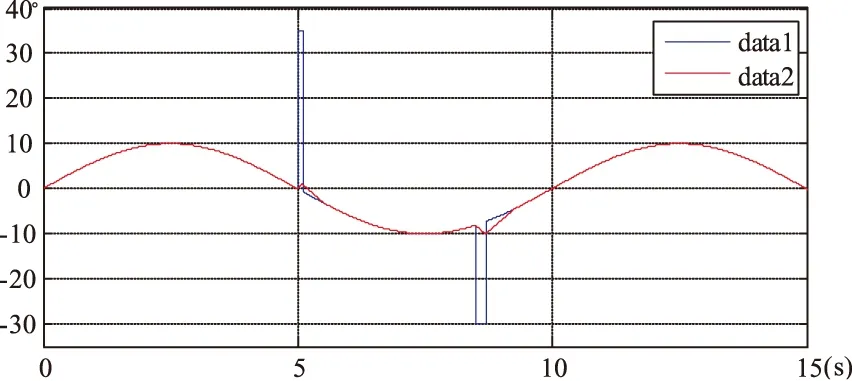
图4 横摇信号防突跳处理示意图
5 跟踪引导数据外推插值预报算法
某些具有跟踪功能的雷达,其跟踪功能需要外部系统给伺服控制系统提供真实目标的引导位置。由于伺服系统自身的采样控制频率一般比较高(通常大于等于100 Hz),而外部提供的引导数据率比较低。因此,为保证引导的精度和可靠性,需要对引导数据进行外推预报计算,使得外推计算的数据率与伺服系统的采样控制频率一致,从而减小控制误差,实现天线平稳无抖动跟踪。
当外部提供的引导数据的数据率和伺服系统的采用频率都是固定不变时,一般采用离散型等距点牛顿后插公式进行数值外推[2]。实际试验表明,上述方法非常有效。等距点牛顿后插外推预报公式如下:

图5为某雷达方位跟踪数据外推预报示意图,data1为方位跟踪外部引导数据,数据率为1 Hz。使用二阶差分对data1进行外推预报。

图5中,data2为data1的二阶外推预报值,数据率为100 Hz,data2较之data1明显平滑连续,可引导伺服系统进行平稳跟踪。

图5 某型雷达方位跟踪数据外推预报示意图
6 结束语
安全性和可靠性是伺服系统设计的重要内容。当故障和失效发生时,将安全风险降至最低并确保人身和设备安全是雷达伺服系统必须具有的基本功能。本文介绍了雷达伺服控制常见的安全开关技术设计、电机报闸技术设计、电气限位技术设计、稳定平台防倾倒技术设计及跟踪引导数据外推插值预报算法等,对雷达转台伺服系统的相关设计具有一定的参考价值。
[1] 平丽浩,等.雷达结构与工艺[M].北京:电子工业出版社,2007.
[2] 陈曾平,等.电路设计基础与专用系统构成[M].北京:科学出版社,2006.
[3] 丛爽,等.实用运动控制技术[M].北京:电子工业出版社,2006.
[4] 刘胜,等.现代伺服系统设计[M].哈尔滨:哈尔滨工程大学出版社,2001.
Design of several technologies of safety and reliability of radar servo control
WU Wan-lan, CHEN Shi-hua, LIU Li
(No.724 Research Institute of CSIC, Nanjing 211153)
Several technologies of safety and reliability of radar servo control is designed, mainly including the safety switch, the motor lock, the electric limit stop, the tilting resistance of the stabilizing platform, and the extrapolation forecast algorithm of the tracked and derived data. The corresponding telecommunication design and data processing methods are introduced specifically, and part of the applied results is also given.
servo system; stabilizing platform; safety switch; lock; electric limit stop
2014-03-11;
2014-03-28
吴婉兰(1979-),女,工程师,硕士,研究方向:控制理论与控制工程;陈施华(1979-),女,高级工程师,硕士,研究方向:控制理论与控制工程;刘丽(1988-),女,助理工程师,硕士,研究方向:控制理论与控制工程。
TN820.3
A
1009-0401(2014)02-0056-03
