基于移动激光扫描系统Trimble MX8的杆状地物提取研究
2014-09-07刘宝
刘 宝
(中国中材集团建材地勘甘肃总队 天水三和数码测绘院,甘肃 天水 741000)
基于移动激光扫描系统Trimble MX8的杆状地物提取研究
刘 宝
(中国中材集团建材地勘甘肃总队 天水三和数码测绘院,甘肃 天水 741000)
介绍车载移动三维激光扫描测量系统的发展和特点,以及Trimble MX8系统的构成和功能应用,重点阐述当前国内学者从激光点云数据中提取杆状地物的方法。通过选择两条不同的道路,在不同道路环境下应用不同的参数对杆状地物进行提取,显示不同的提取结果。通过对实验结果进行对比分析得出:面对不同的道路环境,采用相适宜的参数,再加以人工细致的检查,从激光点云数据中提取杆状地物的结果还是可以满足需要的。
车载;激光扫描;激光点云数据;杆;提取
三维激光扫描技术是一项新兴的技术,因其采集地理信息数据的高效性、高精度性和大数据量性等诸多优点,现已成为获取空间数据的一种重要技术手段。根据载体平台的不同,此技术现主要分为机载、车载、地面激光扫描3种,当然还有船载以及便携式等类型[1]。
车载移动三维激光扫描测量系统[2],又称车载移动激光雷达测量系统,是目前最先进的、有效的测量系统工具之一。它是地面激光扫描测量技术的跨越和发展,代表移动测量系统(Mobile Mapping System)的最新发展趋势,可以快速获取高密集、高精度的激光点云数据,在测量时只需在道路上行驶就能获取两侧和地面详尽的激光点云数据并同步得到与点云高精度匹配的影像。
车载激光测量系统捕捉到的信息包括道路两侧的建筑物、树木、电灯杆、电力线、桥梁以及路面上的交通标识线等[3-7]。本文介绍杆状地物提取的过程和方法。
1 Trimble MX8系统介绍
Trimble MX8系统是美国天宝公司推出的一款车载移动三维激光扫描测量系统,外形如图1所示。

图1 车载移动三维激光扫描测量系统Trimble MX8
Trimble MX8是前几款的升级版,它采用了当今最前沿的测绘技术,集成了全球卫星定位系统(GPS)、惯性导航系统(IMU)、高精度激光雷达扫描仪(Riegl公司VQ-250扫描仪)、360度高分辨率全景相机(Ladybug3)和航位推算系统等先进传感器,因而具有射程远、点密度高、扫描精度高等特点。功能强大的移动测绘传感器可加载在不同的测量平台上(航空飞行器、陆地交通工具、水上交通工具和室内小车),以满足不同范围和精度的测量需求。相关硬件如图2、图3所示。
图2 激光头

图3 相机头
内业后处理软件Trimble Trident Analyst V6.0可进行移动测绘系统现场数据采集管理、影像点云解译和自动要素提取等工作,具备实用便捷的实景量测、数据图层创建、目标定位和智能的自动化数据提取等功能,如数字地表模型生成、3D量测、道路标记和杆状地物检测、路面标识检测、道路标线和横断线检测、路面断裂破损评定、路面影像纠正和拼接镶嵌、道路几何信息提取、净空测量、数据层添加、线性参照、误差量测和纠正、多源数据格式和ODBC接口等功能。
该系统可广泛应用于数字城市建设、应急测绘、公路测量、铁路测量、河道测量、电力线测量,还可应用于隧道测量、桥梁测量、管道测量等领域,大大提升项目生产效率、缩短项目周期,为快速决策、规划、管理和应急响应等提供准确的空间信息数据。
2 杆状地物提取
2.1 国内学者的研究
目前,国外学者的提取算法公开的比较少,所以可供研究的不多[8]。
根据人们以前对激光的了解和使用,得知以下结论:电线杆的反射率在 0.2~0.4之间,树木在0.1~0.3之间,公路标识牌反射率大于0.7,建筑物在0.3~0.6之间,沥青路面反射率在0.2左右,路面中心线和路边线在0.2~0.5之间,水面和玻璃窗户反射率较低,激光点被吸收,反射率几乎为0。
基于以上基础研究,国内学者邹晓亮提出的算法是:针对移动车载激光扫描系统获取的道路信息既包括路面和边界信息,又包括电线杆、灯杆、护栏等附属信息,将投影点密度的概念与电线杆的几何特点相结合,提出了基于车载激光扫描数据自动识别和定位电线杆的方法[9]。其中,投影点密度的概念为将三维点云的坐标点直接垂直投影到水平面上,统计和计算落在网格单元中的投影点个数。
首先将车载测量系统获取的激光点云投影到水平面,建立水平格网,设置投影点密度阈值分类出杆状地物所在的格网区域;然后将分类得到的杆状数据拟合成为一条空间直线,以电线杆的几何特性作为期望值和方差,自动识别电线杆;最后用该空间直线与地面网格相交算法确定电线杆的定位位置。
同时,该算法还考虑用电线杆的几何特性进行识别定位:电线杆高度一般在10~15 m,直径在20~50 cm,垂直于地面,电线杆的倾斜角度不超过5°。
该算法大体包含三个步骤:1)网格建立;2)网格投影与分类;3)考虑电线杆几何特性的识别与定位。
需要指出的是,虽然此处列举的是国内学者对电线杆的自动识别与定位的研究,但这对于杆状地物的提取和定位是有非常重要的借鉴意义的。
2.2 商业化软件的提取过程
Trimble公司的Trident Analyst V6.0软件是一款商业化的软件,它通过使用几个关键的过滤参数来提取杆状地物。打开相应模块[10],如图4所示。

图4 杆状地物探测模块
首先,添加需要处理的激光点云文件,即提取杆状地物的激光点云文件;再看过滤选项,共有5项过滤参数:
1)最大侧面偏移量:指以车行轨迹线为中心,向车两侧探测杆状地物的最大距离范围,默认参数为10 m,实指-10~10 m;
2)最小高度:指探测的杆状地物的最小高度,在此高度以上的杆状地物才有可能作为结果数据,默认参数为2 m;
3)最大宽度:指探测的杆状地物的最大宽度,在此宽度以内的杆状地物才有可能作为结果数据,默认参数为1 m;
4)最大倾斜角度:指探测的杆状地物的最大倾斜角度,在此倾斜角度以内的杆状地物才有可能作为结果数据,默认参数为7°;
5)使用GPS时间来限制提取的数据段:这项参数很容易理解,输入起始时间点、结束时间点,软件只提取这段时间内点云数据里的杆状地物。
输出设置包括2项内容:
1)杆状地物图层。这是一个点图层,用来存储提取到的杆状地物的位置点;它可以由系统自动创建,也可以由用户创建;此图层必须包含两个字段:宽度和高度,即用来存储探测到的杆状地物的宽度和高度;操作时,由用户匹配好这两个字段。
2)只添加新的杆状地物。这里还需要输入一个参数:搜索缓冲区半径,它是以探测到的杆状地物为圆心,以这个参数为缓冲区半径画圆,在这个圆内,如果又探测到了新的杆状地物,那么只在结果数据层中存储这个新的杆状地物,默认参数为1 m。
3 提取实例
本文为了实验结果的可靠性和实用性,分别选取两条具有代表性的不同环境下的道路作为实验路段:
1)天水市秦州区至麦积区高速公路(天北高速)。此段实验道路的特点是:高速公路,道路规则简单,道路两侧、周围几乎没有建筑物和大型树木,扫描车周围也没有各种遮挡等,实景如图5所示。

图5 天北高速路段实景
2)天水市羲皇大道东团庄社区卫生站至南郭寺段。此段实验道路的特点是:典型的城市街道环境,街道两边有高大的建筑物,成年的高大树木,各种状态下的汽车等机动车辆、行人、花坛;除电灯杆之外,还有不少交通标识杆、电线杆、公安监控杆等,实景如图6所示。

图6 羲皇大道东团庄社区卫生站至南郭寺路段实景
下面设置不同的参数在不同的道路上进行多次探测实验。
3.1 路段1)的提取实验如表1所示,提取结果如图7所示。
由表1结合道路环境可以看出,侧面偏移量不能设置过大,否则软件会探测到高速公路以外的地方;最小高度也不能设置过低,否则软件探测的错误率会很高。

表1 在天北高速路段上的实验数据
图8所示为表1中第2次探测的部分结果。其中,图8(a)中用圆圈线表示出的点为正确探测出的杆状地物,方框线表示的是错误探测出的杆状地物。可以看出,当把侧面偏移量设置为20 m时,软件探测的公路外侧范围加大,但探测的结果出现了
错误,探测到树枝或树叶上,甚至其它地物上。另外,图8(a)需要说明的是,图片中右侧有一个路牌,它有两个杆,但由于搜索缓冲区半径设置为1 m,两杆之间的距离又小于1 m,所以探测出的点只有一个,也正好印证了它是同一个地物。
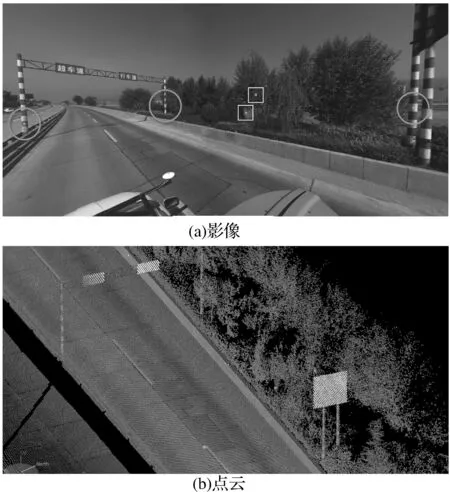
图8 路段1)的第2次探测部分结果(含错误探测点)
3.2 路段2)的提取实验如表2所示,提取结果如图9所示。

表2 羲皇大道东团庄社区卫生站至南郭寺路段的实验数据

图9 羲皇大道东团庄社区卫生站至南郭寺路段上的部分提取结果
由表2结合本条道路环境可以看出,把探测的最小高度由2 m设置为3 m时,其对探测结果影响并不大;然而,当把最大侧面偏移量由10 m设置为20 m时,软件的探测错误率非常高,原因是软件把街道两边以外更大范围的数据探测进来了,包括一些电线杆、一些树干和一些错误的点,结果如图10所示。其中,图10(a)中用圆圈线表示出的点为正确探测出的杆状地物,方框线表示的是探测出的不符合要求的杆状地物或错误地物。

图10 路段2)的第3次探测部分结果(含错误探测点)
由以上两组实验道路、输入参数和实验结果可以看出,对于不同的道路环境,一定要选择合适它的参数,才能做到事半功倍,才能探测到令人满意的结果。当然,合适的参数要通过多次测试才能得到。
4 结束语
本文通过对车载移动三维激光扫描测量系统Trimble MX8的介绍,对其所带内业数据处理软件Trident Analyst V6.0的使用,实验了其对杆状地物的提取功能,对比分析了不同过滤参数下,不同类型的道路上,软件对杆状地物提取的不同效果。结果表明:对不同类型的道路,只要给软件输入和道路类型相适宜的参数,再加以人工的细心检查,对杆状地物的提取能够达到理想的效果。
[1]谭敏,洪金益.基于Terrasolid软件的车载激光点云数据处理初探[J].测绘与空间地理信息,2011,34(5):195-198.
[2]沈严,李磊,阮友田.车载激光测绘技术[J].红外与激光工程,2009,38(3):437-440.
[3]魏征,杨必胜,李清泉.车载激光扫描点云中建筑物边界的快速提取[J].遥感学报,2012,16(2):286-296.
[4]吴芬芳,李清泉,熊卿. 基于车载激光扫描数据的目标分类方法[J]. 测绘科学,2007,32(4):75-77.
[5]张熙,刘晓东,孙伟,等.车载激光扫描技术在西藏公路改扩建中的应用[J].公路交通科技:应用技术版,2011,10:155-157.
[6]李必军,方志祥,任娟.从激光扫描数据中进行建筑物特征提取研究[J].武汉大学学报:信息科学版,2003,28(1):65-70.
[7]丁宁,王倩,陈明九.基于三维激光扫描技术的古建保护分析与展望[J].山东建筑大学学报,2010,25(3):274-276.
[9]邹晓亮,于英,张永生,等.基于车载激光扫描数据的电线杆自动识别与定位[J].测绘科学,2012,37(2):91-93.
[10]TRIMBLE COMPANY.Trimble Trident Software User Guide Version 6.0,Pole De-tection[M]. USA:Trimble Navigation Limited,2013:299-301.
[责任编辑:郝丽英]
Extractionofpolesbasedon3Dvehicle-bornemobilelaserscanningandsurveyingsystem
LIU Bao
(Tianshui Sanhe Digital Institute of Surveying and Mapping,China Construction Materials and Geological Prospecting Center,Gansu General Team,Tianshui 741000,China)
It presents the development and features of the 3D vehicle-borne mobile laser scanning and surveying system before giving an introduction of the structure and function application of the Trimble MX8 system. Following that,it elaborates the study of methods on extracting poles from laser point cloud data at present in China. Besides,it selects two different roads and performs a test on extractions of poles with different parameters and under different road environments,from which different results of extraction are collected. At last,on the basis of comparative analysis of the results,it concludes that for different road environments,the results derived from applying appropriate parameters with careful manual inspection in extracting poles from laser point cloud data can be satisfactory.
vehicle-borne;laser scanning;laser point cloud data;pole;extraction
2014-04-28
刘宝(1985-),男,助理工程师,研究方向:车载移动三维激光扫描测量.
P237
A
1671-4679(2014)05-0015-05