基于汽车主动巡航雷达及车道保持系统的校正装置设计
2014-09-06杨省云
杨省云
(大连纳思达汽车设备有限公司技术部,辽宁大连 116600)
当前,随着高新技术在汽车行业的应用,汽车已经变得越来越智能,汽车的这种智能系统主要有主动巡航、车道保持两大功能。
主动巡航控制系统 (Adaptive Cruise Control,ACC)是一种智能化的自动控制系统,它通过安装在车辆前部的自适应雷达持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC的控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。
车道保持系统是通过安装在汽车前风挡玻璃里面的一个高清摄像头来实时捕捉前方路面上的两条车道线,当车道线转弯时,摄像头将采集到的信息转化成数字信号传递给控制系统,由控制系统操控方向盘自动旋转相应的角度,从而确保车辆始终行驶在车道线里面。
由上述可知,在整个ACC自适应巡航控制系统中,最为关键的部件即为安装在车辆前部的自适应雷达。雷达探测的准确性直接决定着整个系统运行的可靠性乃至车辆的安全,而雷达探测的准确性又和雷达的安装精度密不可分。虽然车辆出厂时都会对雷达进行精确的调校,但车辆经过一段时间的使用后,由于路面的颠簸,往往会导致雷达安装精度的下降,从而使ACC自适应巡航控制系统的稳定性大大降低。因此,定期对ACC自适应雷达进行校正就显得尤为重要。同时,事故车在维修后,也必须对ACC自适应雷达进行重新校正调整。而对于车道保持系统来说,最为关键的部件则为安装在车辆前部的高清摄像头,高清摄像头采集信息的准确性直接决定着整个系统运行的精确性。高清摄像头的安装精度同样需要定期校正。本文所论述的汽车主动巡航雷达及车道保持系统校正,即为ACC雷达和高清摄像头的专用检测调整设备。
1 校正装置的结构组成及工作原理
1.1 校正装置的结构组成
该装置由立柱、底座、直线导轨、校正板、坐标板、激光发射器、水平计、蜗轮蜗杆机构、齿轮齿条机构、调整旋钮等零部件组成,如图1所示。
1.2 主动巡航雷达及车道保持系统校正装置的工作原理
1.2.1 校正主动巡航雷达的步骤
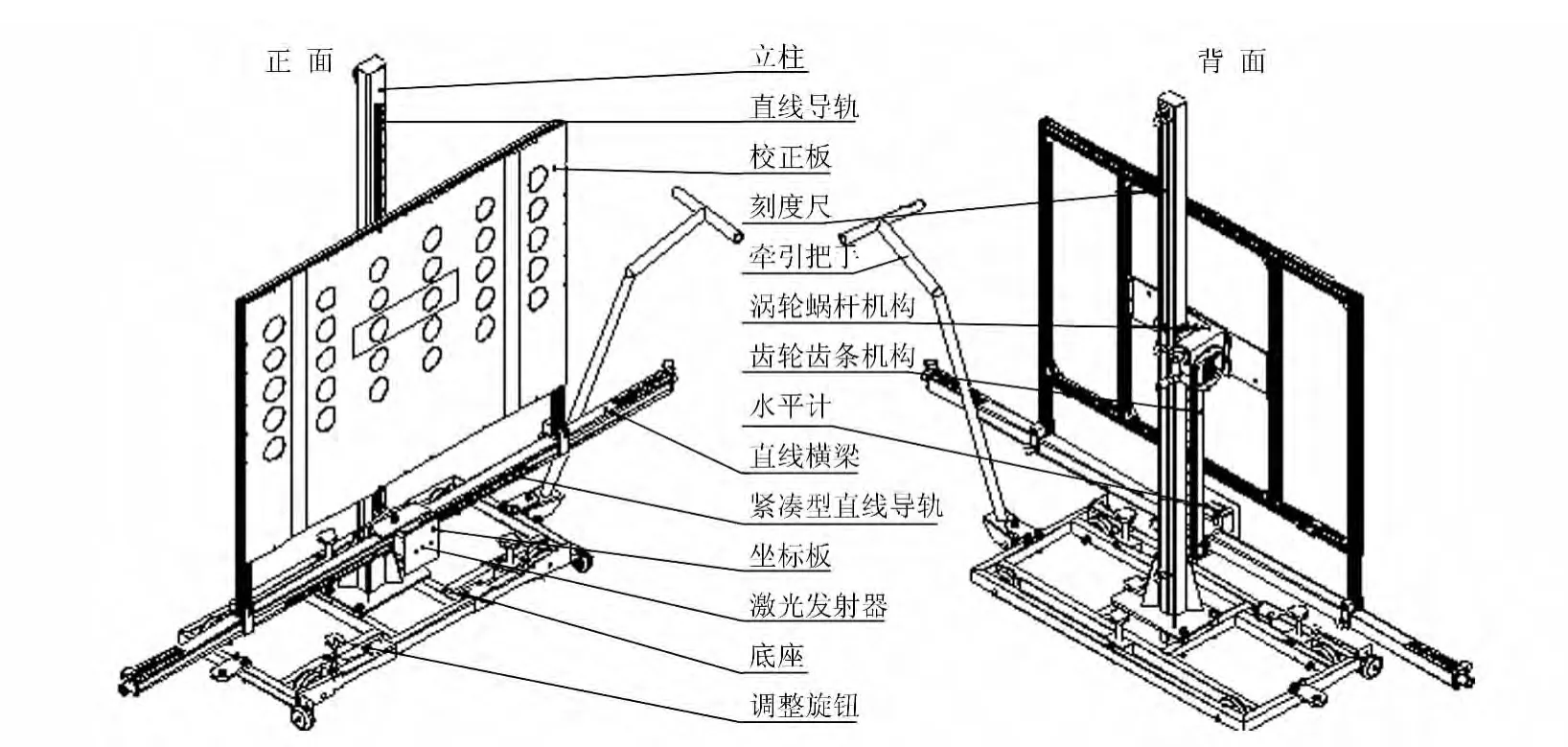
图1 装置结构图

图2 校正装置工作图
校正主动巡航雷达时,需要先用四轮定位仪对该装置与车身的距离、平行度、水平度进行精确调整,具体过程为:先将被检测车辆停置于举升机上,然后将ACC校正装置放置于车前,调整校正装置的前后位置,使雷达坐标板距离轿车雷达(1 145±5)mm。之后将四轮定位仪的4个传感器分别安装于车辆的两个前轮和校正装置横梁的两端,并调整至水平,如图2所示。在四轮定位仪的电脑显示器和校正装置的水平计上,可以直观显示校正装置的横梁是否与汽车平行以及装置自身是否水平,通过调整校正装置的各个粗调和微调旋钮,实现校正装置与车头的平行和自身的水平。然后使激光发射器对准雷达反光镜。射出的激光经反光镜反射后,会在雷达面板上印刷的坐标系里形成一个光斑,如图3所示。同时,轿车的自适应雷达也会探测到坐标板的位置,并在车载电脑里形成一个坐标值。如果此坐标值与光斑所在位置的坐标值一致,则汽车自适应雷达无需校正;若如不一致,则需调整汽车的自适应雷达角度,直到两个值一致。

图3 光斑示意图
1.2.2 校正高清摄像头的步骤
校正高清摄像头时,需要移动校正装置,使其校正板与摄像头的距离为(1 500±5)mm,然后再用四轮定位仪对该装置与车身的距离、平行度、水平度进行重新调整,之后分别测量车辆4个轮眉距举升机平面的高度,将校正板与摄像头之间的实际距离值以及4个轮眉的高度值这5个数据依次输入四轮定位仪的软件中,软件运行后会得出一个高度值,根据高度值再调节校正板高度使指针移动到校正装置立柱后面刻度尺的相应刻度上,如图4所示。此时,车载电脑会控制摄像头通过捕捉校正板上的两条模拟车道线和定位识别点来自动调整自己的角度,直至使摄像头光圈中心和校正板中心重合,完成校正。

图4 指针示意图
2 校正装置主要部件的设计过程
2.1 校正装置主体的设计

图5 主体结构示意图

图6 立柱调整示意图
从校正装置的工作原理和使用过程可以看出,为确保校正精度,必须对校正装置和汽车的相对位置进行精确调整,这些调整包括装置自身的水平度和垂直度,以及装置与汽车的平行度,同时还包括激光发射器组件在水平和垂直两个方向上的平移。为了方便快捷地实现这些调整功能,本装置设计了如图5所示的主体结构。底座上安装有3个水平度微调支脚,根据三点确定一个平面的原理,这3个支脚可以将底座调整至水平状态。立柱和底座的连接同样是依靠3个点接触:立柱下面的3个接触点处分别为2个垫块和1个弹簧,如图6所示。弹簧向上的弹力支撑使得立柱在自然状态下会向左倾斜,通过拧紧垂直度调整把手,使弹簧压缩,就可以使立柱的倾斜角逐渐减小,直至完全消失。水平度和垂直度的调整依靠激光发射器组件上的水平计来直观显示。当这两个基准参数确定好后,就可以调整校正装置和汽车的平行度了。这个平行度主要是指装置直线横梁和汽车两个前轮轴线的平行程度。直线横梁安装在横梁套中,可以绕转轴摆动。在转轴左侧,横梁和横梁套之间安装有一个弹簧,弹簧的弹力使得横梁左侧向前凸出,转轴右侧的横梁套后面安装有一个调整把手,通过它向里拧紧来顶动横梁,使弹簧压缩,以此来调整横梁的平行度,如图7所示。调整好水平度、垂直度、平行度这3个基准参数后,还需要调整激光发射器的位置,使其射出的激光正好对准ACC雷达的反光镜。在本装置中,激光发射器组件是安装在横梁上的,而横梁又固定在直线导轨的下滑块上,因此设计了蜗轮蜗杆带动齿轮齿条的机构,齿轮和蜗轮同轴,齿条和直线导轨上下两个滑块连接。通过摇动蜗杆,就可以使两个滑块上下移动,从而带动横梁沿着直线导轨实现上下移动。激光发射器组件水平方向的平移则是通过安装在横梁前端的紧凑型直线导轨来实现的。

图7 横梁调整示意图
本校正装置的主要部件为激光发射器组件,它的安装精度直接决定着雷达的校正精度。为了确保校正的准确性,本装置设计了如图8所示的结构。激光发射器固定在调整套里,调整套和连接套之间通过3个弹簧和3个螺栓进行连接。
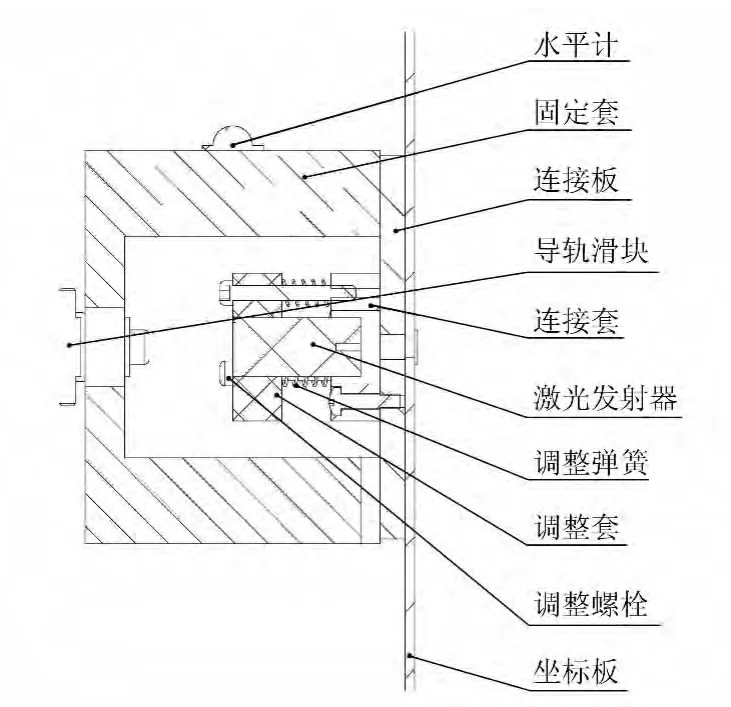
图8 激光发射器组件示意图
连接套与连接板固定在一起,而连接板、水平计、导轨滑块又通过固定套连接在一起。上述零件均为精密磨床加工,从而确保坐标板和导轨滑块的平行度不大于0.01。为了使射出的激光束能够垂直于坐标板,组装后还需要对激光发射器的安装角度进行调整。调整方法为:将激光发射器组件装夹在检具上,通过调整孔调整发射器组件的3个调整螺栓,直至其射出的光束恰好能射进检测孔里,此时说明激光束已经与坐标板垂直,如图9所示。
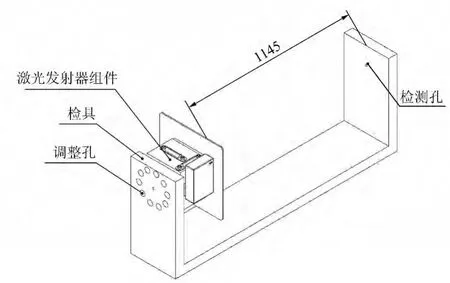
图9 激光发射器角度调整示意图
2.2 光斑坐标值和雷达探测值最大允许偏差的确定
从车辆维修手册中可知,ACC系统雷达的水平视角为12°,最远跟车距离为150m,由此可以计算出在理论上当雷达偏角在3.8°以内时,前车即使变换车道也不会进入雷达信号探测的盲区。但实际使用过程中,由于雷达波自身存在衰减效应,出于安全考虑,因此不允许偏角达到这么大。经多次实际路试,为了使雷达发射波和反射波能够有效叠加从而强化雷达识别的准确率,该偏角以不超过0.5°为宜。由此可以推算出在1 145mm距离处,ACC校正装置光斑允许的最大偏差值为20mm,在这个范围内的偏差,均不会对车载雷达的实际使用造成影响。
光斑偏差示意图如图10所示。设校正装置和车辆的距离为N,垂直偏差为0.5°,则入射光和反射光夹角为1°,那么光斑偏差值X为:

当 N=1 145mm 时,得 X=20.037 5mm。
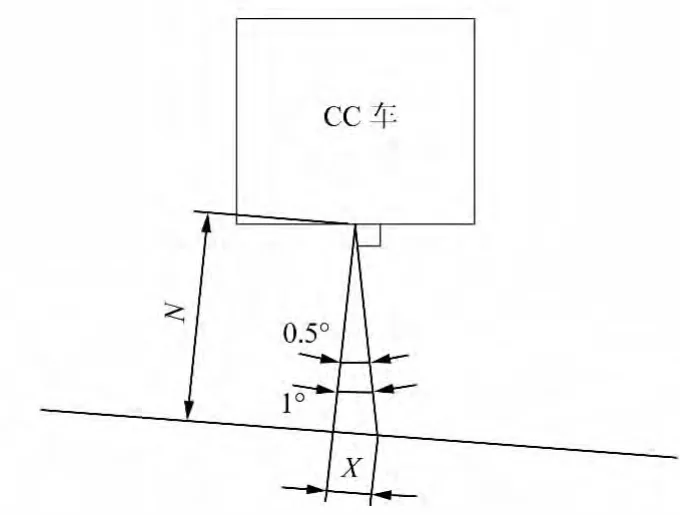
图10 光斑偏差示意图
2.3 横梁直线度最大允许误差的确定
在本校正装置中,直线横梁是一个决定测量精度高低的主要部件,它自身的直线度直接影响着校正装置和被检测车辆的平行度,从而间接决定着激光束的发射角度。因此,必须对横梁直线度的最大允许误差做出精确计算。
如图11所示:横梁长度为2 220mm,四轮定位仪每个探头的质量为1kg,6063-T5材质的抗拉强度为150MPa,则可计算出横梁的变形量为0.14mm,即在校正装置正常工作时的受力情况下,端点径向位移为0.14mm。
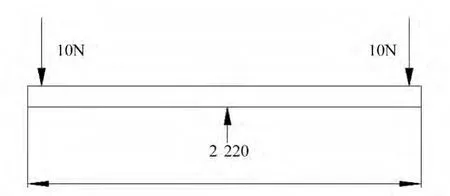
图11 横梁受力示意图
经试车验证,此变形量对使用效果无不良影响。
3 结束语
随着汽修汽保行业向着高速安全的方向快速发展,汽车保养及维修类产品的需求将逐年增加。目前适用于该领域的设备大部分来源于国外进口,且价格偏高,其关键技术也属于国外先进的制造厂商所有,而国内在该方面的研究很少。因此,该产品的开发成功,对于提高自主创新能力,快速发展高新技术产业,促进地方的科技进步和经济发展,提升中国制造业水平都具有非常重要的里程碑式意义。目前,该产品已荣获国家发明专利(ZL201210065887.3),并在一汽大众等品牌汽车4S店中广泛使用,得到了用户的认可与好评。本文通过对该装置结构及原理的论述,为今后再设计开发相关设备时提供一些借鉴。
