Compressed sensing estimation of sparse underwateracoustic channels with a large time delay spread
2014-09-06WuFeiyunZhouYuehaiTongFengFangShiliang
Wu Feiyun Zhou Yuehai Tong Feng Fang Shiliang
(1Key Laboratory of Underwater Acoustic Communication and Marine Information Technologyof Minister of Education, Xiamen University, Xiamen 361005, China)(2Key Laboratory of Underwater Acoustic Signal Processing of Minister of Education, Southeast University, Nanjing 210096, China)
Compressed sensing estimation of sparse underwateracoustic channels with a large time delay spread
Wu Feiyun1Zhou Yuehai1Tong Feng1Fang Shiliang2
(1Key Laboratory of Underwater Acoustic Communication and Marine Information Technologyof Minister of Education, Xiamen University, Xiamen 361005, China)(2Key Laboratory of Underwater Acoustic Signal Processing of Minister of Education, Southeast University, Nanjing 210096, China)
The estimation of sparse underwater acoustic channels with a large time delay spread is investigated under the framework of compressed sensing. For these types of channels, the excessively long impulse response will significantly degrade the convergence rate and tracking capability of the traditional estimation algorithms such as least squares (LS), while excluding the use of the delay-Doppler spread function due to huge computational complexity. By constructing a Toeplitz matrix with a training sequence as the measurement matrix, the estimation problem of long sparse acoustic channels is formulated into a compressed sensing problem to facilitate the efficient exploitation of sparsity. Furthermore, unlike the traditionall1norm or exponent-based approximationl0norm sparse recovery strategy, a novel variant of approximatel0norm called AL0 is proposed, minimization of which leads to the derivation of a hybrid approach by iteratively projecting the steepest descent solution to the feasible set. Numerical simulations as well as sea trial experiments are compared and analyzed to demonstrate the superior performance of the proposed algorithm.
norm constraint; sparse underwater acoustic channel; compressed sensing
Recently, there has been increasing interest towards underwater communication in many acoustical applications such as marine environmental monitoring[1-4]and oceanic acoustic tomography[5]. However, due to multiple reflections, refractions and scattering, underwater acoustic (UWA) channels are prone to propagating along multiple paths, which results in an excessive delay spread[1-5]. The complex nature of the propagation channel creates a challenging channel estimation problem[6]for the R&D of high speed, large capacity, bandwidth-efficient digital communications in underwater conditions[4]. The sparse structure of the channel impulse response has long been exploited to improve the performance of channel estimation, by reducing the number of taps to be updated and avoiding estimation noise created by a large number of zero taps[6-7].
The conventional FIR channel model has been widely used for sparsity exploitation of underwater acoustic channel with different adaptive algorithms developed for selective updating of dominant taps according to certain explicit or implicit thresholds such as a sparse adaptive algorithm[8]and the NNCLMS proposed by Wu and Tong[9]. Furthermore, for time varying UWA channels, the design of a suitable threshold to balance the computational complexity and estimation accuracy is highly challenging, as the time delay, as well as magnitude of each dominant tap may vary significantly.
For the least squares (LS) method[10-12], in the presence of channels with the large time delay spread, the requirement that the length of the averaging window should be proportional to the dimension of the channel will be too strict for a time-varying channel like underwater ones to remain constant during this period[11]. Meanwhile, the computational complexity of LS-based channel estimators will increase significantly with the number of channel taps.
Previous research indicated that the delay-Doppler spread function model enables efficient estimation of rapidly time varying underwater acoustic channels. In Ref.[6], Li and Preisig employed the matching pursuit (MP) algorithm and its orthogonal version OMP to achieve simultaneous optimization of the delay-Doppler parameter. The projected gradient method[13]is also analyzed to estimate the parameter of the delay-Doppler spread function of underwater acoustic channels. Nonetheless, when the total time delay spread of the underwater channel is large, the corresponding two-dimensional parameters of the delay-Doppler spread function will lead to unbearable computational complexity.
Compressive sensing is becoming a frontier that has recently gained much attention in the field of applied mathematics, system identification and signal processing. In this paper, motivated by its ability to resolve individual arrivals or clusters of arrivals in multipath channels, efficient estimation of long sparse underwater acoustic channels is discussed within the framework of compressive sensing.
Most of the pervious compressive sensing sparse channel estimation investigations were designed for the OFDM systems[14-15], because the DFT matrix can be conveniently used as the CS measurement matrix to satisfy the restricted isometry property (RIP). In view of the general single carrier communication systems that probe the channel with a training sequence, Gohberg et al.[16-17]pointed out that a random Toeplitz-like matrix constructed by training sequence also satisfies the RIP. In this paper, a Toeplitz-like measurement matrix is employed to estimate the long sparse acoustic channel under the compressive sensing framework.
Furthermore, unlike the traditionall1norm or Gaussian smoothing based approximationl0norm methods which are generally optimized by matching pursuit (MP), iteratively re-weighted least squares (IRLS)[18]or zero attraction projection (ZAP)[19], direct minimization of a new variant of approximatel0norm called AL0 leads to the derivation of a novel sparse reconstruction method to yield a performance improvement in the presence of the large time delay spread.
1 Problem Formulation
Considering the transmitted signals(t), received signaly(t), time-varying channelh(t,τ) and additive noisew(t) with delay timeτand geotimet, under the assumption that the channel function remains constant throughoutmsamples, the discrete input-output representation can be written as[6-7,13]

(1)
y[i]=y(iΔt)i=1,2,…,m
(2)
s[i]=s(iΔt)i=1,2,…,m
(3)
h[i]=h(iΔt,τ0+(j-1)Δτ)
i=1,2,…,m;j=1,2,…,n
(4)
whereτ0is the reference delay;nis the maximum time delay sampling dimension called channel order;mis the length of averaging windows inside which the channel remains stable;s[i] andy[i] are the discrete transmitted signal and received signal, respectively; andw[i] is the discrete additive noise.
Defining anm×ndimensional Toeplitz-like matrixA{k}with the transmitted signal as[17]
(5)
The input-output relationship at {k} time point is shown as follows:
y{k}=A{k}h{k}+w
(6)
y{k}={y[k+n],y[k+n+1],…,y[k+n+m-1]}T
(7)
h{k}={h[k],h[k+1],…,h[k+m-1]}T
(8)
wherewis the white noise of the dimensionm×1.
The estimation problem ofh{k}in Eq.(6) can be addressed by a least squares method[10-12]. However, the window lengthmshould be proportional to the channel dimension to guarantee the stability of the algorithm. As a result, a channel with a long time delay spread will require a largem, which may be rather restrictive or even unrealistic if it exceeds the coherent time of the time-varying channel.
The purpose of this paper is to solve a sparseh{k}with a large delay spread from Eq.(6) with a smallm, which means a fast and efficient estimation of long and sparse channels. However, Eq.(6) will become an underdetermined problem if them×nToeplitz-like matrix has a relationship ofm≪n. Namely, it has more unknowns than the number of equations.
By exploiting the sparsity contained in the channel response, it is possible to solve Eq.(6) withm≪nby formulating this problem into a compressed sensing framework. According to the compressed sensing theory[20-21], to obtain a unique sparse solution of Eq.(6) in the underdetermined systems, the measurement matrixAshould satisfy the restricted isometry property (RIP) written as
(9)
Fortunately, it is recognized that many types of random matrices satisfy the restricted isometry condition with a high probability[19-22]. Bajwa et al.[17]examined Toeplitz type matrices in the context of compressed sensing where the entries of the vector generating the Toeplitz or Toeplitz-like matrix are chosen at random according to a suitable probability distribution. Compared to the Bernoulli or Gaussian matrices, random Toepliz matrices have the advantage of less random numbers being generated. Moreover, there are fast matrix-vector multiplication routines which can be employed for sparse recovery algorithms[17].
Thus, in Eq.(6) the Toeplitz-like feature of matrixAmeans that it is possible to estimatehunder the relationship ofm≪nby adopting a sparse recovery method withAas the CS measurement matrix. In this sense, an estimation of sparse underwater acoustic channels with a large time delay spread is actually a compressed sensing problem.
2 Derivation and Evaluation of the Proposed Algorithm
2.1 New version of approximationl0norm

(10)

(11)
An approximation ofl0norm offers another type of solution for sparse recovery, and different approximation functions such as exponential function[19]have been proposed to adopt a control parameter to seek a tradeoff between global optimum and reconstruction accuracy. In an attempt to try differentl0norm approximations with a tractable function for the sparse evaluation of long sparse channel response, it is observed that the tangent function exhibits better smooth behavior under the same step of parameter tuning compared to the exponential function which is used to formulate Gaussian smoothing[19]. Thus, under the framework of smoothingl0norm we define a different smoothing function to approximatel0norm, called AL0, by the use of tangent function, as
(12)
whereh(i) is thei-th element in vectorh;σis a variable parameter designed to control the accuracy and the smoothness of the approximation, which is relevant to the noise energy inh. Smallerσleads to better approximation accuracy, while largerσwill smooth the approximation curve.
In view of different mathematical behaviors of tangent and exponential functions with respect to the corresponding control parameter, in this paper the iterative solution of the proposed AL0 norm sparse recovery is derived and evaluated for compressed sensing estimation of long sparse underwater acoustic channels.
2.2 Derivation of AL0 norm solution
Combined with (12), the AL0 norm objective function can be expressed as

Regarding the direct minimization of the AL0 norm in Eq.(13a), the gradient descent recursion is
(14)
The scalar version of Eq.(14) is written as
∀1≤i≤n
(15)
whereμjis the step-size parameter at thej-th iteration.
∀1≤i≤n
(16)

hj=hj-AH(AAH)-1(y-Ahj)
(17)
The proposed AL0 norm compressed sensing channel estimation algorithm is described using pseudo-codes as follows:
Step 1 Given the end condition for algorithm iterationσth, iteration timesJ, complex-value transmission signal sequences constructed Toeplitz-like matrixA, received signaly.
Step 2 Whenσj>σth, runs Eq.(16) and Eq.(17) forJtimes, respectively.
Step 3 Updatingσl+1=βσl.
Step 4 Check ifσj>σthis satisfied, if yes, jump to Step 5, otherwise, jump to Step 2.
Step 5 Output solution ofh.
2.3 Performance metrics
In numerical simulations, with a known and fixedhthe channel estimation signal to noise ratio (SNR) can be used as performance metrics to measure different algorithms, which is defined as
(18)
Furthermore, considering that the physical acoustic channel is unknown and time-varying, in the sea data experiment, the performance of the channel estimation algorithm was evaluated by the output of a channel-estimation-based equalizer. That is, initially the channel response was obtained by the proposed and reference algorithms with a fixed number of training sequences. Then the obtained channel estimates were used to construct a correlation based decision feedback equalizer (DFE)[23]to achieve symbol recovery of the following sequence, the constellation as well as bit error rate of which will be used as performance metrics of channel estimation.
In view of time variations of the physical sea channel, the length of the training sequence is relatively short with respect to the channel dimension to ensure the channel remaining constant during the corresponding period. The channel time variations of the following sequence aere tracked and accommodated by the adaptive unit of the correlation based equalizer[23].
3 Numerical Simulation
In this section, to demonstrate the performance of the proposed algorithm, numerical simulations are performed. The acoustic source is positioned at 100 m depth, and the receiver is located at 120 m depth with 210 m range of the source, as illustrated in Fig.1. The depth of the shallow ocean is 200 m and the bottom is assumed to be perfectly rigid. The acoustic velocity is a constant,c=1 500 m/s. Based on the acoustic ray propagation model[24], the channel impulse responses were plotted by the Bellhop Toolbox as shown in Fig.1, which is a typically long sparse channel. The Bellhop Toolbox is a highly efficient ray tracing program written in Fortran as part of the Acoustic Toolbox[25].
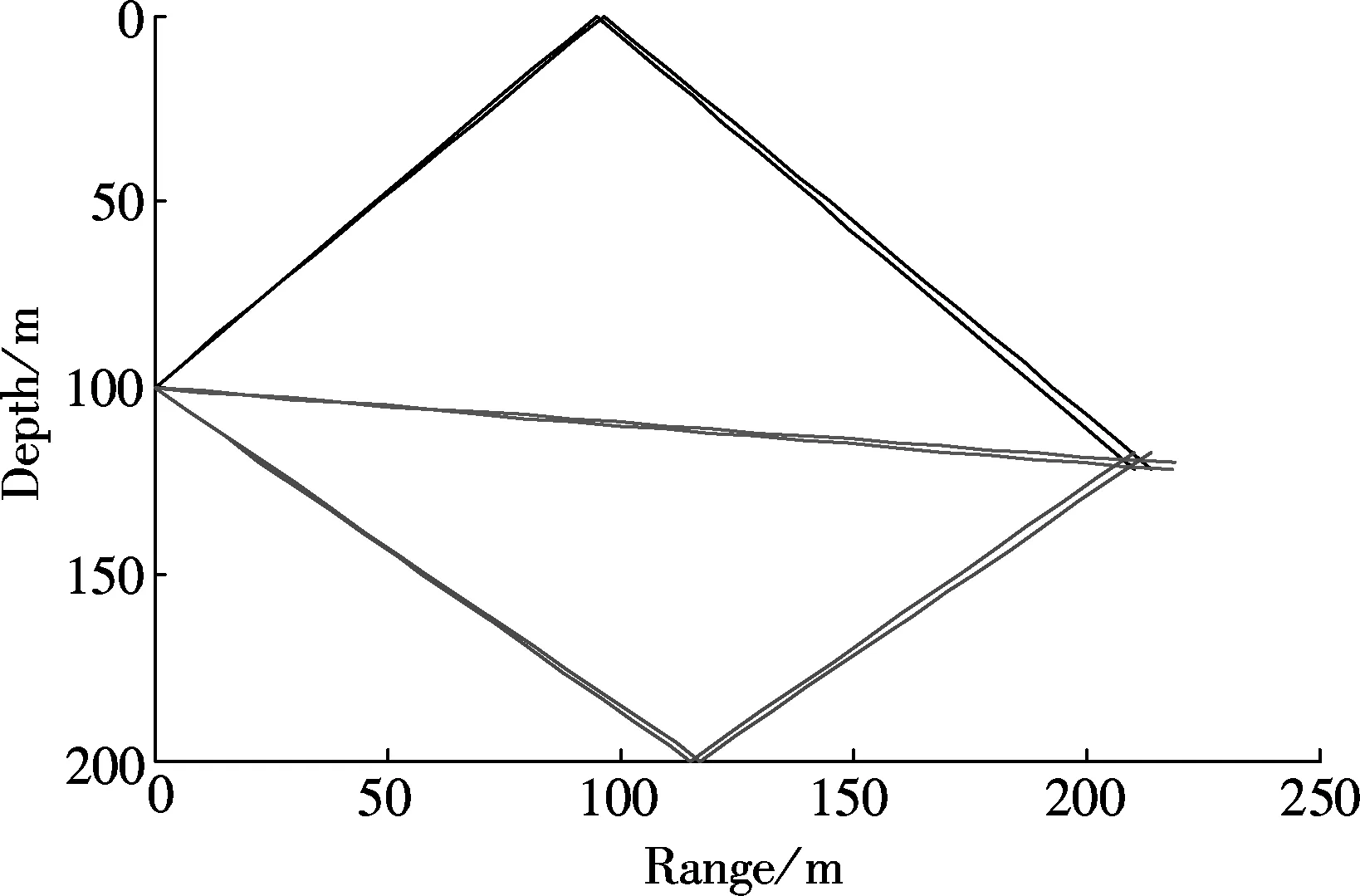
Fig.1 Acoustic ray propagation model for a shallow water environment
The baseband quadrature phase shift keying (QPSK) signal with the symbol ratefb=4 kBd is adopted as the transmitted sequence. The sampling interval of the delay and geotime is taken as the symbol duration, which is defined asTc. As shown in Fig.2, the multipath channel impulse response generated by the Bellhop Toolbox exhibits a typical sparse pattern as well as a long time delay spread spanning a range of 500 symbol durations. The real part and imaginary part of transmitted bit are generated according to standard uniform distribution on the open interval (0,1). The output signal is generated by convolution of channel coefficients with the transmitted sequence. Then one can obtain the input-output relationship according to the formulation described in Eq.(6). In this numerical simulation, we setm=600, 500, 400 andn=2 760 to take an obvious relationship ofm≪n.

Fig.2 Simulated channel response
The parameters of the proposed AL0 algorithm are set asμ0=2,J=3,β=0.8. The performance of the traditional sparse recovery methods including OMP,ZAP, IRLS as well as the iterative least squares QR (LSQR) algorithm[11]are compared to that of the proposed method. It is noted that while the reference sparse recovery algorithms solve the channel within the compressed sensing framework, the LSQR algorithm was implemented to estimate the channel in a classic least squares manner to offer a comparison result.All the numerical simulations were operated under the same conditions,performed in a Matlab 7 environment using an Intel Core i3-2120 CPU (@3.3 GHz) with 4 GB of memory under Win 7 operating system.
The performances of different algorithms were evaluated by SNR metrics, which are shown in Tab.1. One can see that in this simulation, as the LS algorithm does not utilize any sparsity of the acoustic channel, the parameter configuration ofm≪ndegrades the performance of the channel estimate, with the worst SNR result among all the reference algorithms. One may also observe that, while the ZAP and OMP both outperform the IRLS, the proposed AL0 method achieves a significant higher SNR result than OMP, ZAP, or IRLS algorithms do.

Tab.1 The performance of different algorithms dB
In addition, to offer a performance reference under ideal parameter configurations, LS estimation was also performed withm=1 200 to produce an SNR of 35.66 dB as indicated in Tab.1, verifying a predictable performance improvement. Note that in the numerical simulation, the channel is fixed, thus increasingmwill not lead to performance degradation caused by channel variation.
It is recognized that the performance of the compressed sensing algorithms will outperform traditional methods such as the LS method on the condition that the target signal is sparse enough. In other words, the superiority of the compressed sensing algorithms will vanish if the signal is not sparse. For the underwater acoustic channels created by multipath propagation, the sparse assumption of the CS algorithm is generally easy to meet. Compared with the classic CS methods such as OMP and ZAP, the performance enhancement of the proposed AL0 algorithm may be interpreted in different approximation methods tol0norm.
4 At-Sea Experiment
In this section, at-sea experimental results are presented to verify the effectiveness of the proposed algorithm. The modulation format is quadrature phase-shift keying (QPSK) with a bit rate of 8 kbit/s and a carrier frequency of 16 kHz. The bandwidth of the transducer couple is 13 to 18 kHz. The original sampling rate of the received data is 96 kHz. The sampling interval of the delay and geotime is taken as 1/4 of the symbol duration to provide robustness in the carrier phase fluctuations in the underwater acoustic channel.
The experimental field data was collected from a shallow water acoustic channel with slight wind conditions at a semi-closed gulf near Qingdao, China. The depth of the experiment area was about 15 m. The transmitting transducer was suspended to a depth of 4 m from a boat, with the receiving transducer suspended to a depth of 4 m at the pier. The distance between the transmitter and receiver was 200 m. The raw received signal recorded during the sea experiment had an SNR of 14 dB. The channel estimation and equalization algorithm was implemented in Matlab and used for off-line processing of the experimental data.
In the experiment, the algorithm parameters for channel estimations were taken as follows: Δt=Δτ=1/16 ms,m=400,n=1 200, with the parameters of the proposed AL0 algorithm set asμ0=2,J=3,β=0.8.
For the performance comparison, OMP, ZAP, IRLS, the proposed method as well as the LSQV algorithm were utilized to estimate the experimental shallow water acoustic channel and then use the obtained channel to design a correlation based equalizer.
Furthermore, as the purpose of the channel estimation is to provide the channel response to optimize the channel equalizer, the accuracy of the channel estimation will determine the performance of the equalizer, as well as the communication quality. Thus, the channel responses obtained in the experiment with the proposed and reference algorithms are used to construct a correlation based decision feedback equalizer (DFE)[25]to achieve symbol recovery. By coupling the passive phase conjugation (PPC) with a single-channel DFE, the correlation based decision feedback equalizer is capable of improving the adaptability to different channels[25].
Unlike the normal PPC processor that requires a vertical array of many receivers to yield spatial diversity, the purpose of the experiment was to evaluate the performance of channel estimation. Also, a simplified single-channel PPC was adopted by only employing a single channel impulse response obtained with the channel estimation algorithm, which means that no spatial diversity was exploited in the performance comparison and evaluation. The length of the single channel PPC matched filter is the same as that of the channel estimator, set asn=1 200 to cover the range of multipath delay spread. The purpose of the RLS updating single-channel DFE is to remove the residual inter symbol interference (ISI). The filter length of the RLS updating forward and backward is set to be 24, 12 respectively, with the RLS forgetting factor of 0.998. Both the PPC and the DFE work at 1/2 symbol rate. The bit error rate(BER) was adopted to evaluate the performance of the proposed and reference algorithms.
For the implementation of the correlation-based equalizer under time-varying shallow water channel, we use an initial estimate of the channel impulse response obtained by the proposed and different reference algorithms as the coefficient of the PPC matched filter, and then utilize the RLS updating DFE to address the residual ISI and accommodate the temporal variation of the physical channel. The initial estimate of then=1 200 order sparse acoustic channel was obtained by the firstm=400 samples of receiving sequence and then set as the coefficient of the fixed PPC matched filter for PPC processing of the following sequence with a length of 2 000.
The constellation outputs of the equalizer corresponding to different channel estimation algorithms are provided in Fig.3, from which one may see that the LS estimator corresponds to a poor constellation quality, as the parametermis not large enough with respect tonfor the LS algorithm to achieve a good performance. By exploiting the sparsity of the channel impulse response under the compressed sensing framework, in terms of the estimation accuracy, the compressed sensing methods generally yield satisfactory performance compared with the LS method. With the proposed AL0 norm method, they achieve a better constellation result than the OMP, ZAP, or IRLS algorithm do. Similarly, withm=n=1 200, LS produces an enhanced constellation, but is still inferior to ZAP and the proposed method clearly.
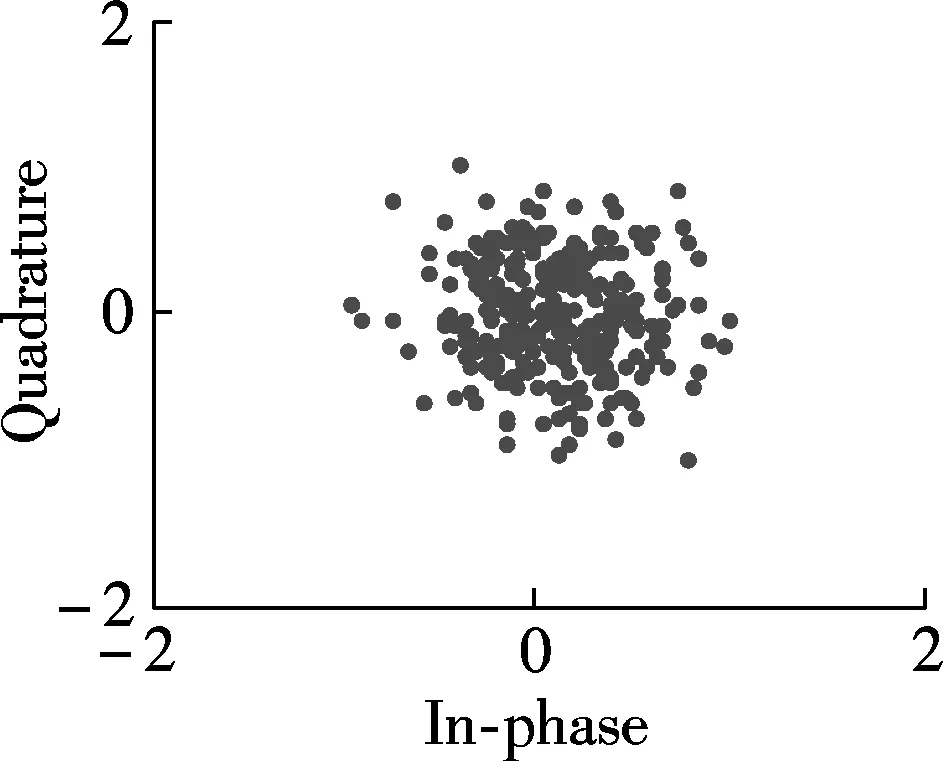
(a)

(b)

(c)
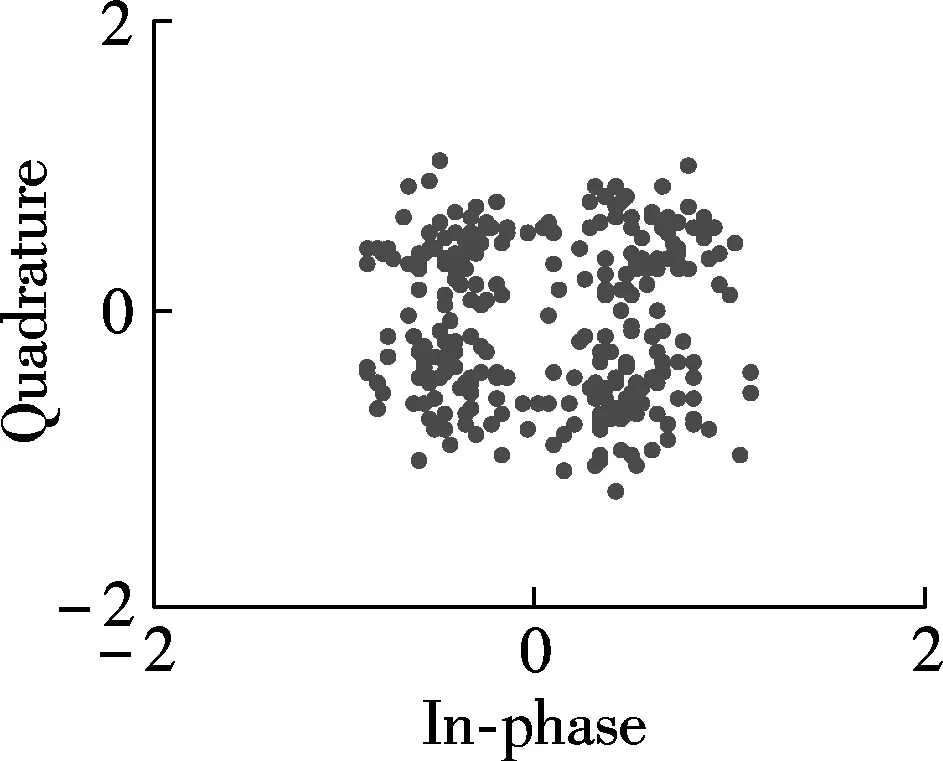
(d)

(e)

(f)
Fig.3 Scatter plots of the equalizer corresponding to different channel estimation algorithms. (a) LS (m The BER results obtained by the channel estimation based equalizer are quantitatively shown in Tab.2. It is evident that the equalizer corresponding to the proposed channel estimation algorithm yields the best BER result among all the reference algorithms, further validating the superiority of the proposed AL0 channel estimation method to the other conventional compressed sensing channel estimation algorithms. The LS method produces the worst BER, which is consistent with the result of constellation plot. Again, whenm=n=1 200, the BER of the LS method increases to 3.18%, approaching to but still poorer than that of all the CS type channel estimation methods. Tab.2 BER performance corresponding to different algorithms AlgorithmsLS(m Aimed at improving the estimation performance of shallow sparse underwater channel with a large delay spread, a compressed sensing estimation algorithm is formulated by constructing a Toeplitz matrix with the training sequence as the measurement matrix. Unlike traditional sparse recovery strategies, a new variant of approximatel0norm is introduced into the cost function of sparse recovery channel estimation, the direct minimization of which leads to the derivation of an iterative optimization approach. This incorporates the steepest gradient descent algorithm and the projection of the gradient descent solution to the feasible set. Numerical simulation and sea data experimental results show that the proposed algorithm exhibits better estimation performance than traditional methods at the presence of a sparse acoustic channel with a large delay spread. [1]Rouseff D, Badiey M, Song A. Effect of reflected and refracted signals on coherent underwater acoustic communication: results from the Kauai experiment (KauaiEx 2003) [J].JournaloftheAcousticalSocietyofAmerica, 2009, 126(5): 2359-2366. [2]Singer A C, Nelson J K, Kozat S S. Signal processing for underwater acoustic communications [J].IEEECommunicationMagazine, 2009, 47(1): 90-96. [3]Chitre M S, Shahabodeen S, Stojanovic M. Underwater acoustic communications and networking: recent advances and future challenges [J].MarineTechnologySocietyJournal, 2008, 42(1): 103-116. [4]Stojanovic M. Efficient processing of acoustic signals for high-rate information transmission over sparse underwater channels [J].PhysicsCommunications, 2008, 1(2): 146-161. [5]Demoulin X, Stephan Y, Jesus S, et al. Intimate 96: a shallow water tomography experiment devoted to the study of internal tides [C]//ProceedingsoftheInternationalConferenceonShallowWaterAcoustics. Beijing: China Ocean Press, 1997: 485-490. [6]Li W, Preisig J C. Estimation of rapidly time-varying sparse channels [J].IEEEJournalofOceanEngineering, 2007, 32(4): 927-939. [7]Cotter S F, Rao B D. Sparse channel estimation via matching pursuit with application to equalization [J].IEEETransactionsonCommunications, 2002, 50(3): 374-377. [8]Pelekanakis K, Chitre M. New sparse adaptive algorithms based on the natural gradient and the L0-norm [J].IEEEJournalofOceanEngineering, 2013, 38(2): 323-332. [9]Wu F Y, Tong F. Non-uniform norm constraint LMS algorithm for sparse system identification [J].IEEECommunicationLetters, 2013, 17(2): 385-388. [10]Paige C C. Fast numerically stable computations for generalized linear least squares problems [J].SIAMJournalonNumericalAnalysis, 1979, 16(1): 165-171. [11]Haykin S.Adaptivefiltertheory[M].3rd ed. Englewood Cliffs, NJ: Prentice Hall, 1996. [12]Song A, Badiey M, Song H C, et al. Impact of ocean variability on coherent underwater acoustic communications during the Kauai experiment (KauaiEx) [J].JournaloftheAcousticalSocietyofAmerica, 2008, 123(2): 856-865. [13]Zeng W J, Xu W. Fast estimation of sparse doubly spread acoustic channels [J].JournaloftheAcousticalSocietyofAmerica, 2012, 131(1): 303-317. [14]Wang Z H, Zhou S, Catipovic J, et al. Parameterized cancellation of partial-band partial-block-duration interference for underwater acoustic OFDM [J].IEEETransactionsonSignalProcessing, 2012, 60(4): 1782-1795. [15]Berger C R, Zhou S, Preisig J, et al. Sparse channel estimation for multicarrier underwater acoustic communication: from subspace methods to compressed sensing [J].IEEETransactionsonSignalProcessing, 2010, 58(3): 1708-1721. [16]Gohberg I, Olshevsky V. Complexity of multiplication with vectors for structured matrices [J].LinearAlgebraApplication, 1994, 202(15): 163-192. [17]Haupt J, Bajwa W, Raz G, et al. Toeplitz compressed sensing matrices with applications to sparse channel estimation [J].IEEETransactionsonInformationTheory, 2010, 56(11): 5862-5875. [18]Daubechies I, DeVore R, Fornasier M, et al. Iteratively reweighted least squares minimization for sparse recovery [J].CommunicationsonPureandAppliedMathematics, 2010, 63(1): 1-38. [19]Jin J, Gu Y, Mei S. A stochastic gradient approach on compressive sensing signal reconstruction based on adaptive filtering framework [J].IEEEJournalofSelectedTopicsinSignalProcessing, 2010, 4(2): 409-420. [20]Candes E, Romberg J, Tao T. Robust uncertainty principles: exact signal reconstruction from highly incomplete frequency information [J].IEEETransactionsonInformationTheory, 2006, 52(2): 489-509. [21]Donoho D L. Compressed sensing [J].IEEETransactionsonInformationTheory, 2006, 52(4): 1289-1306. [22]Baraniuk R G. Compressive sensing [J].IEEESignalProcessingMagazine, 2007, 4(4): 118-122. [23]Yang T C. Correlation-based decision-feedback equalizer for underwater acoustic communications [J].IEEEJournalofOceanEngineering, 2005, 30(4): 865-880. [24]Zeng W J, Jiang X, Li X L, et al. Deconvolution of sparse underwater acoustic multipath channel with a large time-delay spread [J].JournaloftheAcousticalSocietyofAmerica, 2010, 172(2): 909-919. [25]Kostas S, Paolo C, Michele Z. The throughput of underwater networks: analysis and validation using a ray tracing simulator [J].IEEETransactionsonWirelessCommunications, 2013, 12(3): 1108-1117. 稀疏长时延水声信道的压缩感知估计 伍飞云1周跃海1童 峰1方世良2 (1厦门大学水声通信与海洋信息技术教育部重点实验室, 厦门 361005)(2东南大学水声信号处理教育部重点实验室, 南京 210096) 提出一种基于压缩感知框架下的长时延水声信道估计算法.用传统的自适应算法如最小二乘(LS)算法处理典型的长时延水声信道的估计问题时,会导致其收敛速率下降,即跟踪能力有限,而使用时延多普勒函数则加大了计算量和复杂度.通过训练序列构建一个Toeplitz矩阵作为测量矩阵,将长时延信道估计问题转为压缩感知问题,并利用信道的稀疏结构特性进行稀疏估计.与传统的l1范数或基于指数形式的近似l0范数稀疏恢复策略不同,所提出的是一种新的似l0范数稀算法(简称AL0),该算法通过融合最陡梯度和迭代投影寻优进行求解.仿真与海试数据结果验证了所提算法的优越性. 范数约束;稀疏水声信道;压缩感知 TB567 s:The National Natural Science Foundation of China (No.11274259), the Open Project Program of the Key Laboratory of Underwater Acoustic Signal Processing of Ministry of Education (No.UASP1305). :Wu Feiyun, Zhou Yuehai, Tong Feng, et al. Compressed sensing estimation of sparse underwater acoustic channels with a large time delay spread[J].Journal of Southeast University (English Edition),2014,30(3):271-277. 10.3969/j.issn.1003-7985.2014.03.003 10.3969/j.issn.1003-7985.2014.03.003 Received 2014-02-27. Biographies:Wu Feiyun (1984—), male, graduate; Tong Feng (corresponding author), male, doctor, professor, ftong@xmu.edu.cn.
5 Conclusion
猜你喜欢
杂志排行
Journal of Southeast University(English Edition)的其它文章
- P-FFT and FG-FFT with real coefficients algorithm for the EFIE
- Improved metrics for evaluating fault detection efficiency of test suite
- Early-stage Internet traffic identification based on packet payload size
- An adaptive generation method for free curve trajectory based on NURBS
- Stability analysis of time-varying systems via parameter-dependent homogeneous Lyapunov functions
- Application of the Delaunay triangulation interpolationin distortion XRII image