多核DSP的SF与PD联合运动补偿算法实现*
2014-09-06杨康周建江杨成
杨康,周建江,杨成
(南京航空航天大学 电子信息工程学院, 南京 210016)

杨康,周建江,杨成
(南京航空航天大学 电子信息工程学院, 南京 210016)
对脉组间调频步进信号进行处理可以直接获得合成超带宽距离像及目标速度信息,获得的距离像具有较高的分辨率。然而目标的运动将会导致成像产生距离迁徙及波形失真,所以必须对目标的运动进行速度补偿。本文在论述了脉组间参差脉冲重复周期(SPRT)的速度补偿新方法及PD+调频步进体制联合工作模式的基础上,提出了基于TMS320C6678多核DSP的目标运动补偿算法的并行实现方法,该方法论述了目标运动补偿的任务级并行流水与核间高效通信。研究结果表明,基于多核DSP的复杂运动补偿算法具有较好的实时性及较高的目标成像精度。
调频步进;脉冲多普勒;脉组间参差PRT法;嵌入式多核DSP;并行处理
1 算法原理
1.1 调频步进信号的多普勒效应
调频步进雷达通过脉间线性跳变来获得等效大带宽,在现有的硬件水平限制下,具有较窄的瞬时带宽,降低了对接收机和信号处理器件的要求。对于单目标而言,将调频步进雷达的接收回波与其本振信号进行混频,再通过低通滤波器进行低通及双通道处理,得到的视频信号为:
(1)
其中,Ai为第i个发射脉冲经混频和低通滤波后处理后视频信号的幅度,Nb为一帧发射信号的子脉冲个数,Tr为回波脉冲重复周期,Tpb为发射的脉冲宽度。视频信号的相位为:ψi(t)=-2πfiτ(t);运动目标回波对应的距离延时为:τ(t)=2R/c-2vt/c。R为目标距离,v为雷达相对于目标的运动速度,c为光速。
对回波脉冲串进行采样,令:
则第i个采样点可表示为
i=0,1,…,Nb-1
(2)
当目标处于静止状态,即v=0,将τ(t)的表达式带入式(2),并对第i个脉冲串进行N点的IFFT运算并求模,可得:
(3)
其中,k=0,1,2,…,Nb-1, |Y(k)|为R处的目标一维距离像,当k=round(2R·NΔf/c)时,上式取得最大值。距离像的分辨率为ΔR=c/(2NΔf),与单个脉冲相比距离分辨率提高了N倍;距离像的距离宽度(或不模糊测距间隔)为c/(2Δf)。
然而,调频步进信号是一种多普勒敏感信号,当目标速度不为零时,高分辨率成像会出现距离迁徙及波形失真情况。考虑到上述分析中v≠0情况,目标运动在视频回波相位中会引入如式(4)所示的一次线性干扰项及二次非线性干扰项。
(4)
对于目标运动速度的估计,国内外已经展开了较多的研究,并已提出了多种运动补偿的方法。归结而言,这些方法主要分成三大类:
① 利用参数估计法。参考文献[6]描述的极大似然估计法(ML)及参考文献[7]提出的多项式相位变换(DPT)法是都是典型的参数估计方法。
② 利用频率步进信号的特性。这类方法主要利用回波的多帧数据之间的位置变化进行目标速度的估计,典型的方法有正负调频法[8]、时域互相关法[9]等等。
③ 利用目标速度搜索的算法,典型的算法有对比度法和最小熵法[10-11]等。
本文将要介绍的基于脉组间参差PRT的速补偿法属于上述的第二类算法。首先利用步进频信号的PRT法得到目标运动速度的一次估计,然后借助PD的高精度测速,实现双体制的目标运动联合补偿。
1.2 SF+PD联合体制运动补偿
首先介绍一种称为脉组间参差脉冲重复周期PRT进行目标速度估计的方法。
所谓PRT法就是借助多组脉冲周期不同的信号来进行目标速度估计的方法。雷达发射多组复合调频步进SF信号,每一组SF信号由多帧(譬如两组)子信号组成。假设两帧SF信号的脉冲周期分别为Tr1和Tr2。由于Tr1和Tr2是极小量,在两帧信号发射过程中,目标距离和运动速率变化可忽略不计。对一组复合调频步进信号做N点的IFFT,可得到两帧SF信号的距离像位置分别为
(5)
(6)
将以上两式联合计算可测得速度为
(7)
假设雷达发射的SF信号参数为:载频 f0= 94 GHz,脉冲重复周期Tr1=18 μs,Tr2=16 μs,子脉冲的宽度为Tpb=200 ns,步进频率值Δf=5 MHz,一帧的脉冲个数128。假定对SF回波数据进行512点的IFFT运算,则采用PRT法测速可达到的不模糊范围为v = (-398.936 m/s , 398.936 m/s),测速精度可达到1.5583 m/s。使用相同参数,参考文献[9]提出的时域相关测速法达到的测速范围为±13 021 m/s,但是测速精度仅为203.45 m/s;而参考文献[8]提到的正负调频测速法可达精度为0.346 m/s,但是测速范围只有±22.164 m/s。相比较上述的两种测速法,PRT法得到的测速范围和测速精度都保持在较好的水平,这在一般战场环境不是十分复杂的应用中是比较适合的。
然而,对于测速精度及测速范围要求很高的应用场合,PRT法显然不能满足要求。因此,可考虑借助PD雷达的高精度测速及回波处理简单等优势来进一步提高PRT法的测速范围和测速精度。
由上述分析可知,采取PRT法进行目标运动测速的范围足够大,但是精度与测速范围成反比。而PD测速精度很高,满足运动补偿的精度要求,但是不模糊测速范围相对较小。所以必须将基于SF的脉组间参差脉冲重复周期法与PD测速的方法结合起来,才能进行精确有效地测速。
假设PRT法测得目标的速度为v1和v2,则实际速度可表示为
(8)

因此,高分辨率成像雷达信号体制在设计时考虑到上述运动补偿实现算法,选择SF和PD交叉体制,交替发射调频步进信号以及多普勒信号。每一组发射信号由一帧PD信号以及两帧具有相同脉冲数的调频步进信号组成。PD信号的脉冲数为Np,脉冲周期为Tr;连续的两帧SF信号脉冲数为Nb,脉冲周期分别为Tr1和Tr2。雷达发射信号波形如图 1所示。
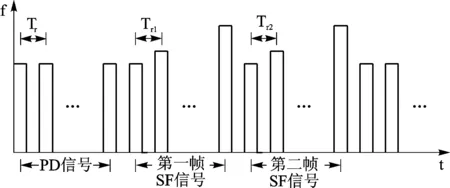
图1 雷达交替发射PD信号和SF信号
根据上述双体制联合运动补偿算法分析,对每一组雷达回波的数字信号处理流程如图 2所示。
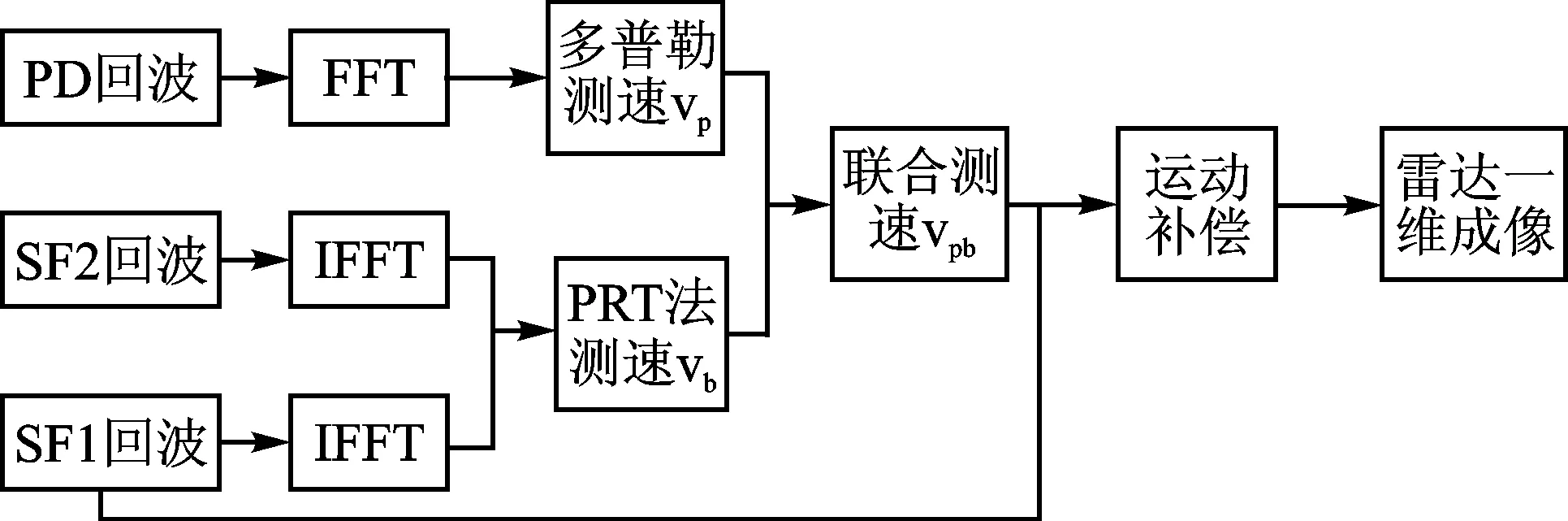
图2 SF和PD复合体制运动补偿流程
2 基于多核的运动补偿算法实现
2.1 信号处理系统架构
本系统采用基于TMS320C6678嵌入式DSP架构,外围辅助Xilinx公司的FPGA作为前端数据采集和初步信号处理的模块。利用FPGA丰富的I/O资源和逻辑运算资源,对前期大量的雷达信号数据进行采集和预处理,然后再通过RapidIO接口将FPGA处理后的数据传送给DSP,在DSP中进行进一步雷达回波数据的算法实现。具体的系统架构如图3所示。
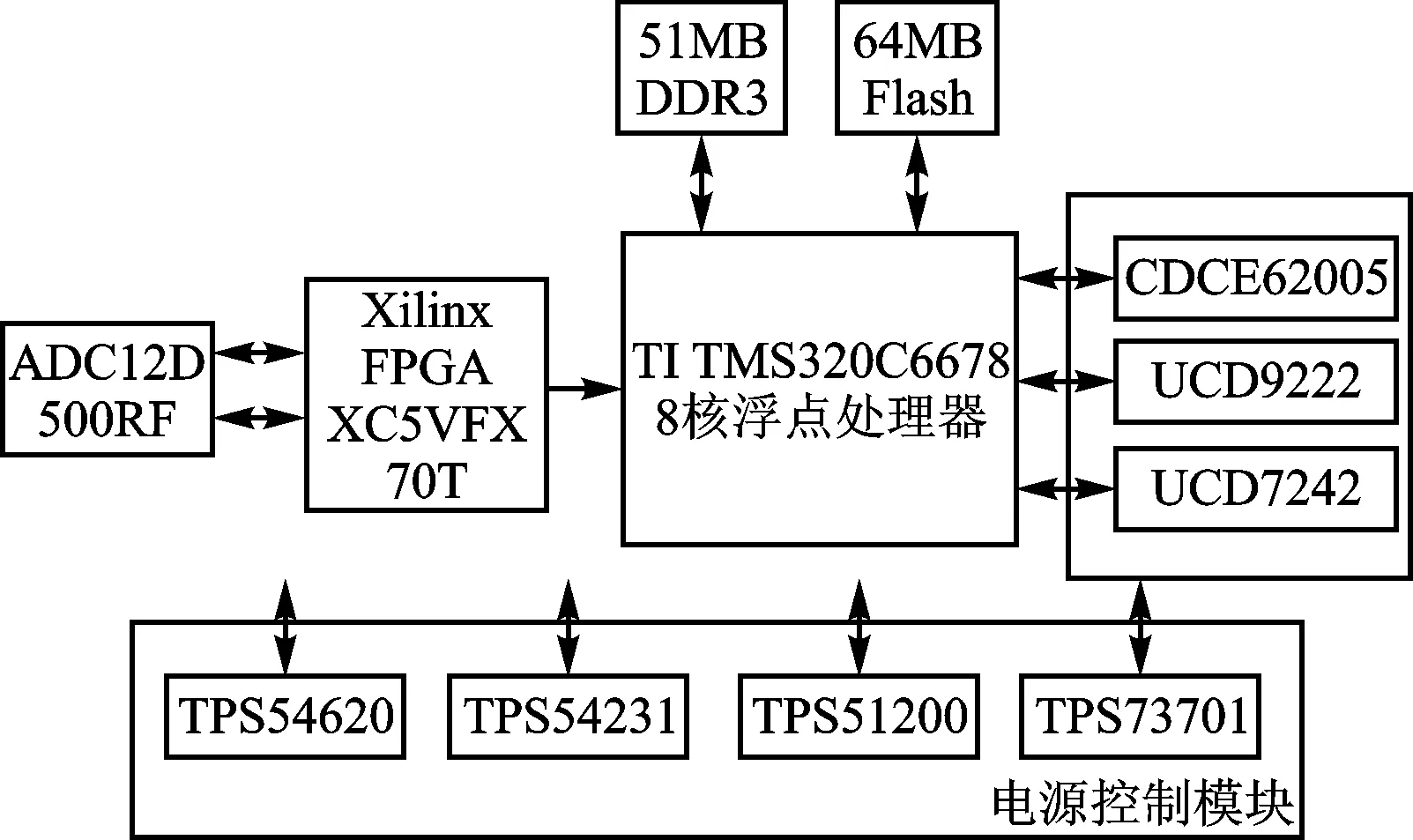
图3 雷达信号处理系统架构
TMS320C6678是一款基于KeyStone架构的高性能浮点嵌入式DSP。
本系统采用基于SYS/BIOS的IPC通信模块与EDMA协同工作,最终实现了核间的通信与数据的交换。
2.2 任务并行模式
对于多核系统,根据其处理器分工的不同,可分为主从工作模式和数据流工作模式。
主从模式显著的特点为集中控制,分散执行,强调多核之间的主从之分,一般而言核0作为主核,负责任务的分工和调度;其余各核作为从核,负责任务的并行执行。而数据流模式的显著特点为分散控制,分散执行。采用该模式时,系统中不同的任务将被映射到各个核中,各个核根据传递数据的有效性来而并发地执行不同的任务,整体上实现程序的流水线状态。本文中的系统任务是1000帧回波信号经过混频,低通滤波,双通道处理以及A/D转换之后进入多核DSP进行运动补偿及高分辨率成像处理。根据任务描述的情况,本文选择主从任务模式。核0负责任务调度及核间任务同步控制,其余各个核连同核0参与具体任务的分工。
2.3 核间通信模块设计
核之间,以及核与外设之间的通信是多核编程的核心。核间通信包括数据的通信和消息的通信。数据通信是大量数据的传输,通信时间长,实时性要求较低; 消息(状态量)通信是小数据量的传递,用于核之间任务调度过程中控制指令传输以及状态量的反馈,通信时间短,要求的实时性较高。
根据算法的实际需要,KeyStone架构下数据通信的实现采取了EDMA以及基于SYS/BIOS的IPC模块联合工作方式实现大数据量的传输和核间消息的传递。核间通信模块如图4所示。

图4 核间通信模块设计
3 测试结果及分析
本文对1000帧雷达回波进行信号处理以验证上述算法的可靠性和多核计算的实时性。雷达发射波的参数为:载频f0=94 GHz,子脉冲的宽度为Tpb=200 ns。PD脉冲重复周期为Tr=20 μs,一帧PD脉冲个数为1 024个。调频步进脉冲重复周期Tr1=18 μs,Tr2=16 μs,步进频率值Δf=5 MHz,一帧的脉冲个数128。目标在距离雷达系统1 800~2 000 m之间的范围内移动,速度在-50 ~50 m/s之间变化。本系统对该目标进行距离和速度的估计。并基于测试结果,对算法精度和效率进行分析。
3.1 运动补偿精度分析
使用PRT算法以及联合补偿算法对雷达回波进行处理,得到速度的估计以及速度估计的误差。并且利用联合法得到的速度对调频步进回波信号进行运动补偿,进而得到比较精确的目标一维距离像。基于TMS320C6678平台对雷达回波的数字信号处理结果略——编者注。
联合测速法得到的速度估计精度比PRT测速精度高出50倍以上。且随着回波信号的SNR变化,PRT法估计的速度误差有较明显的浮动。随着信噪比减小,回波信号中干扰加强,PRT法的测速精度会有较大回落。而采取联合测速的方法,速度精度高,且基本不随回波信号的SNR产生变动,这是由于其自身融合了PD测速辅助,联合测速精度可以达到多普勒测速精度值。这也是为什么测速需要借助PD雷达的原因。另一方面,由于PD测速范围较小,所以需要借助PRT方法扩展测速的范围。
3.2 运算量及耗时分析
联合体制运动补偿算法在TMS320C6678多核上实现,不仅使得算法在实现起来灵活多变,更重要的是提高了算法的实时性,有利于在复杂作战环境中快速且精确地跟踪目标。本文对1000帧雷达回波进行数字信号处理,基于上述运动补偿算法采取了三种实现方案。首先,在MATLAB平台上实现该算法,算法具体的耗时为1 546.875 ms。 这对于高速运行的弹载系统而言,实时性要求不高。然后在TMS320C6678平台上,采取了基于8核以及基于4核的算法实现,两种方案实现算法消耗的周期数及时间略——编者注。
由于各核算法是并行实现,所以系统中的运行周期数及算法耗时取决于运行耗时最多的核。经过优化之后,算法的实时性得到进一步提高,根据测试结果可知,八核的目标运动补偿算法实时性能达到20 ms以内,满足了复杂战场环境对高速雷达系统的实时性要求。

[1] 杨武涛, 张伟, 龚耀寰. 弹载条带式合成孔径雷达实时成像技术研究[C]//2007年北京地区高校研究生学术交流会论文集. 北京,2008:844-849.
[2] 邱春武. 基于并行处理单元的代码优化方法研究 [D].北京:北京邮电大学,2008.
[3] 李世杰. DSP汇编程序优化方案[J]. 单片机与嵌入式系统应用,2005(12): 33-35.
[4] 夏桂芬, 朱淮城, 黄培康. 调频步进频雷达的测速方法性能分析[J]. 系统工程与电子技术,2011,33(3): 534-538.
[5] 冯强, 胡毅, 于东,等. 基于多核嵌入式数控系统的速度前瞻算法研究[J]. 组合机床与自动化加工技术 2013 (3): 16-20.
[6] Abatzoglou TJ, Gheen GO. Range, radial velocity, and acceleration MLE using radar LFM pulse train[J]. IEEE Transactions on Aerospace and Electronic Systems, 1998,34(4): 1070-1083.
[7] Peleg S, Friedlander B. The discrete polynomial-phase transform[J]. IEEE Transactions on Signal Processing, 1995,43(8): 1901-1904.
[8] Berizzi F, Martorella M, Cacciamano A. Synthetic range profile focusing via contrast optimization[C]//Geoscience and Remote Sensing Symposium, IGARSS 2007 IEEE International,23-28 July 2007:3563-3566.
[9] 左衍琴, 朱永锋, 赵宏钟,等. 频率步进雷达高速目标运动补偿新方法[J]. 雷达科学与技术,2010,8(2): 151-158.
[10] 罗贤全, 于久恩, 尚朝轩, 等. 步进频雷达目标ISAR成像运动补偿新方法[J]. 宇航学报,2007(5): 1288-1294.
[11] Ho-Ryung J, Hyo-Tae K, Dong-Hyun K. Application of Subarray Averaging and Entropy Minimization Algorithm to Stepped-Frequency ISAR Autofocus[J]. IEEE Transactions on Antennas and Propagation, 2008,56(4): 1144-1154.
[12] 蔡征宇, 陈文武, 谢仁宏. 提高多普勒雷达测速估计精度的方法[J]. 南京理工大学学报:自然科学版, 2009,33(4): 520-523,527.
[13] 郑章汝, 王红敏, 李冬, 等. 基于TMS320C6678的雷达信号处理机设计[J]. 工业控制计算机,2012,25(11): 14-15.
[14] Texas Instrument,TMS320C6678 Multicore Fixed and Floating Point Digital Signal Processor,2012.
杨康、杨成(硕士研究生),研究方向为嵌入式系统设计与信号处理;周建江(教授),主要研究方向为雷达信号处理、目标识别和目标特性分析。

Yang Kang, Zhou Jianjiang, Yang Cheng
( College of Electronic and Information Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
High range resolution can be obtained by processing of millimeter wave stepped-frequency signal, but the motion of object can cause the phenomena of distance-migration and waveform distortion in the 1-D range profile, so it is necessary to make compensation in the motion velocity. In this paper a method of velocity estimation called staggering pulse repetition time (SPRT) in different pulse groups is mentioned and then a complex work mode of radar system based on SF and PD is discussed. Then, a method of the motion compensation algorithm of range profile using SF+PD work model based on TMS320C6678 is introduced. The method implements task-level parallel pipeline and efficient inter-core communication. Experimental results show that the method is feasible and effective, and has a good real-time performance with high resolution of the range profile.
module step-frequency; pulse Doppler; stagger pulse repetition time in different pulse groups; embedded multi-core DSP;parallel processing
南京航空航天大学研究生创新基地(实验室)开放基金资助 (项目编号:kfjj120116); 中央高校基本科研业务费专项资金资助。
TP399
A
珍
2013-10-15)