负温下炭黑/硅橡胶导电复合薄膜力敏特性研究*
2014-09-06周国庆王英杰
廖 波,周国庆,王英杰
(1.浙江工商大学技术与工程管理系,杭州 310018;2.中国矿业大学深部岩土力学与地下工程国家重点实验室,江苏 徐州 221008)
负温下炭黑/硅橡胶导电复合薄膜力敏特性研究*
廖 波1*,周国庆2,王英杰2
(1.浙江工商大学技术与工程管理系,杭州 310018;2.中国矿业大学深部岩土力学与地下工程国家重点实验室,江苏 徐州 221008)
对炭黑/硅橡胶导电复合薄膜试样进行了负温条件下的力敏特性试验研究。测试结果表明,薄膜试样在负温下(最低温度达到-35 ℃)仍具有优良的拉伸敏感特性。试样电阻随拉伸变形的增大而增大,电阻与应变(最大应变达到20%)之间具有良好的线性关系。不同负温条件,复合薄膜试样表现出基本一致的力敏特性。炭黑含量越大,试样导电稳定性越好,但灵敏度相应有所降低。研究结果表明,薄膜元件可满足较低负温、较大应变下的拉伸变形测试,且线性度、稳定性都较好。
炭黑;硅橡胶;力敏特性;薄膜元件;负温
导电复合材料包括本征型和填充型两类。将不同导电填料分散在不同的绝缘基体中,可获得具有不同特性的充填型导电复合材料。目前采用的导电填料主要有导电炭黑、短切碳纤维、碳纳米管、螺旋形炭、石墨粉及各种金属粉末、金属氧化物等;绝缘基体主要采用热塑性和热固性树脂、天然橡胶和合成橡胶等高分子聚合物。由于基体材料及充填材料的多样性,对填充型导电复合材料的研究较多,主要涉及复合材料填料、配方、导电机理、力敏特性、热敏特性等。炭黑填充硅橡胶基导电复合材料具有优良的力敏、热敏传感特性[1],在机器人柔性触觉传感器、大应变拉伸测试传感器、压力传感器及温度传感器等方面均具有应用开发的价值[2-7]。
目前,常用的传感测试方式主要包括压阻式、压电式、电容式、电感式等,压阻式具有较高的精度和较好的线性度得到了广泛的应用[8];压阻式也可称压阻效应,是指固体受到作用力后电阻率(或电阻)发生变化的力敏传感现象[9]。填充型导电复合材料具有力敏特性(亦称压阻效应),受压缩或者拉伸荷载时电阻值发生变化。Wang等对炭黑充填硅橡胶基复合材料的压阻特性进行了较为系统的研究,分析了炭黑含量对压阻性的影响[2],研究发现,炭黑含量不同时导电复合材料表现出完全不同的压阻特性;压缩试验发现复合材料存在电阻松弛与蠕变现象,并认为硅橡胶基体本身的粘弹性是导致电阻松弛与蠕变的主要原因[10];研究同时发现,复合材料受压循环及预压力对压阻性有不同影响[11]。黄英团队基于柔性触觉传感器的开发对炭黑填充导电橡胶开展了大量的研究工作,主要包括压力传感器非线性特性[6]、力敏与温度传感器力敏系数[4-5]、电阻-温度模型[12]、力学灵敏度[13]等,并试图利用这种传感材料开发机器人触觉传感器。周国庆团队利用炭黑与碳纤维填充的橡胶基导电复合材料开发了加筋带变形测试传感器[14],并在工程中获得了初步应用[7]。另外,王鹏、吴菊英等对炭黑/橡胶导电复合材料力敏特性方面也进行了理论与试验方面的研究[15-17]。
上述研究中,对导电复合材料的力敏传感特性研究均是在室温下进行的,负温下的力敏特性试验研究还很少见到报道;而考虑到应用开发的需要,对这种新型传感材料基础性研究工作中,负温下相关试验的研究是必要的。为此,本文选用硅橡胶为基体,炭黑为导电填料制作炭黑/硅橡胶导电复合薄膜试样,在负温条件下对其进行拉伸敏感特性试验研究。
1 试验
1.1 原材料及薄膜试样制备
硅橡胶选用107型室温硫化型液体硅橡胶;导电炭黑型号为ECP-CB-1。薄膜制作方法同文献[1],制作的导电复合薄膜试样如图1所示,试样尺寸60 mm×10 mm×0.1 mm。图1中,试样中间黑色为导电传感薄膜,两端为铜电极,铜电极上焊接导线。
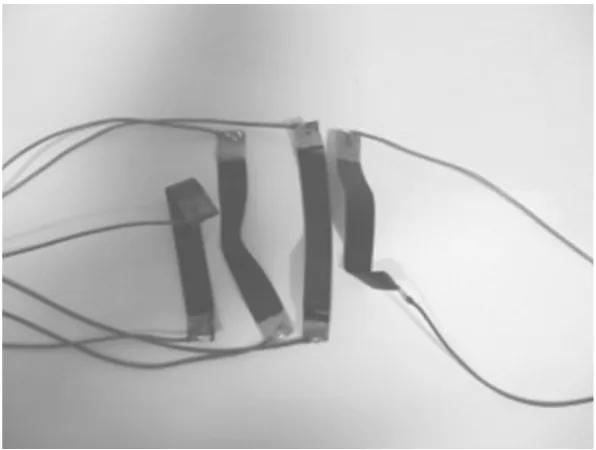
图1 试样照片
所使用的液体硅橡胶技术参数列于表1,从表1可知,硅橡胶可在-60 ℃~200 ℃的温度氛围使用,制作的炭黑/硅橡胶导电复合薄膜试样可在负温条件0~-60 ℃范围内进行试验。为保证研究的系统性,炭黑填充配方范围由4%变化到18%(炭黑相对硅橡胶的质量分数);在此范围内,共分为8组配方,每组配方之间炭黑含量相差2%,样品编号用C4~C18表示,C4表示炭黑相对硅橡胶的质量分数为4%,以此类推。
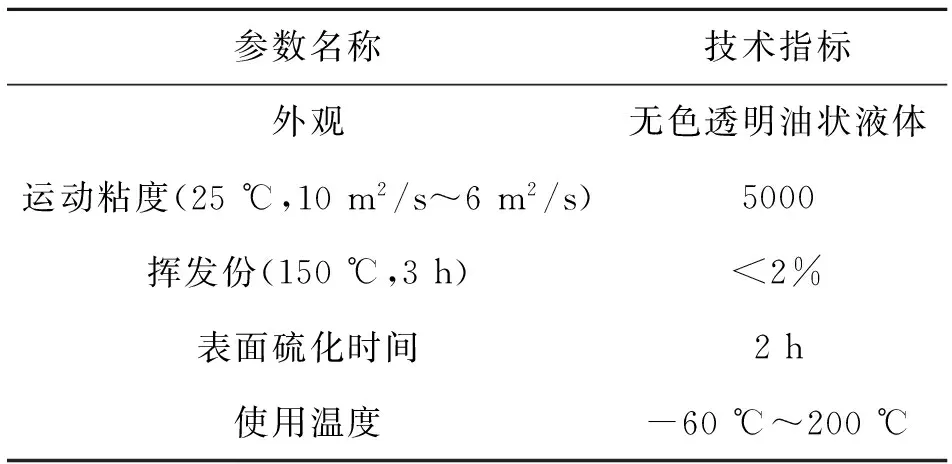
表1 硅橡胶技术参数
1.2 测试方法
将上述制作的导电复合薄膜试样置于冷柜中,利用小型力学试验机对其进行拉伸试验,测试其负温下的传感特性。试验测试系统如图2所示,包括①冷柜,可实现-60 ℃~0 ℃的温度控制;②测试系统,由DateTaker800数据采集仪及计算机组成,实现对试样电阻的测试,电阻测试范围为0~100 kΩ;③自制的小型拉力试验机,将其置于冷柜中,对试样进行拉伸试验。

图2 试验测试系统
2 试验结果
2.1 不同温度下测试结果
对各配方炭黑/硅橡胶复合薄膜试样在不同负温条件下进行拉伸试验测试。不同温度下,对薄膜试样在长度方向上进行拉伸试验并测量实时的电阻值,得到不同温度各配方试样电阻与拉伸应变之间的关系曲线,如图3所示。选择了8种配方,每种配方制作了5个试样,总计测试获得40组试验数据,由于篇幅原因,图3中只列出3组典型试验数据,分别是C10、C14及C18的试样数据。每组数据包括4种负温条件,分别是-5 ℃、-15 ℃、-25 ℃与-35 ℃;拉伸应变从0变化到20%,属较大应变范畴。如图3中C10电阻-应变曲线,其中的4条曲线分别代表C10配方试样在这4种负温条件下的电阻-拉伸应变关系曲线。
从图3中曲线可知,在负温条件下试样电阻R随应变ε的增大而增大,同样具有拉伸敏感特性;且可以明显看到,各配方各温度下的电阻-应变曲线都近似直线,说明试样电阻与拉伸应变之间具有近似线性的关系。为进一步分析,对C10的4条曲线进行直线拟合,获得的线性拟合方程依次是:R=81.96ε+3349.70(R2=0.9941);R=78.39ε+3214.10(R2=0.9966);R=75.60ε+3112.70(R2=0.9965);R=78.61ε+2980.3(R2=0.9956)。从这4个拟合方程可知,4条曲线的线性度很好,相关系数均接近于1;另外,4个方程的斜率非常接近,在75~82的范围内,可知4条曲线接近于平行关系。
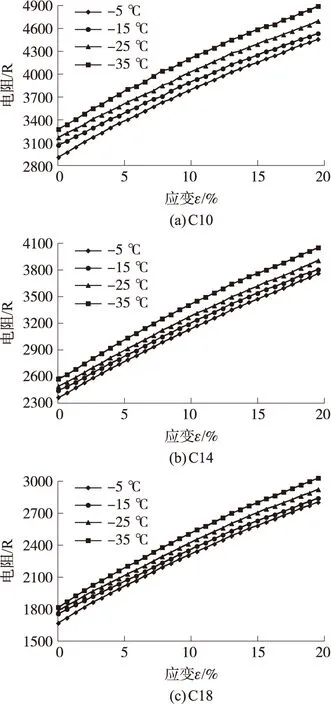
图3 不同温度下电阻-拉伸应变曲线
C14、C18的相关曲线也具有上述类似特点,各温度下的电阻-应变曲线近似于直线且各曲线具有近似平行关系。在试验中拉伸应变最大变化到20%,在此较大应变范围内各试样曲线均表现出了优良的线性力敏特性。
2.2 不同配方下测试结果
这里选取一种温度下的试验曲线进行分析。如图4所示为-25 ℃下7种不同配方(分别是C6、C8、C10、C12、C14、C16与C18)试样电阻-拉伸应变曲线。由于C4试样电阻与其他7种配方试样电阻差异太大(主要由于炭黑填料小,具体原因可参见文献[18]),不便于作于一张图上,鉴于不影响分析,此处不再列出。
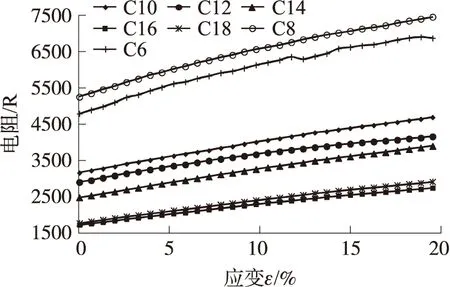
图4 不同配方试样电阻-拉伸应变曲线(-25 ℃)
同理,对图4中7条曲线进行线性方程拟合,结果发现,各试验曲线均表现出较好的线性度,且斜率相差不大。为直观性,对数据进行归零处理,如图5所示获得归零后的电阻-拉伸应变曲线。从图5可以看到,各配方曲线的斜率是不同的,C6、C8试样与其他5种试样曲线具有明显的不同,炭黑含量8%到10%之间有一个分界点;也可发现,随着炭黑含量的增大,试样曲线的斜率具有逐渐减小的趋势,C18曲线的斜率明显小于C6。
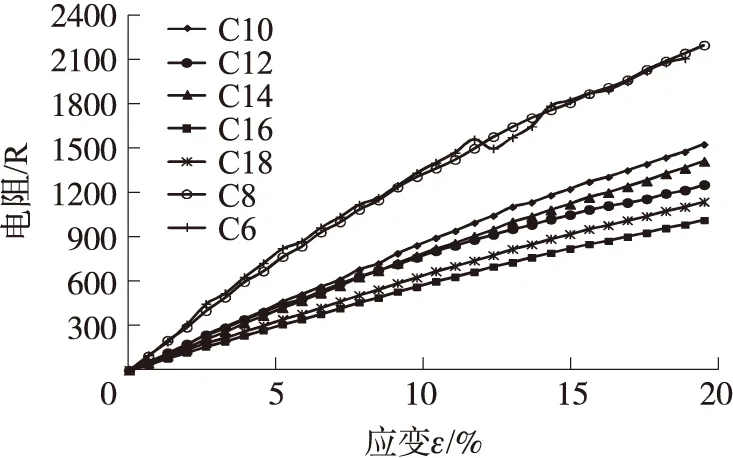
图5 不同配方试样电阻-拉伸应变曲线(-25 ℃)
3 传感特性分析
目前关于填充型导电聚合物复合材料的导电机理及力阻模型尚没有统一的理论。Wang等以隧道效应理论为基础建立了导电压-阻模型[2]:
(1)
式(1)中,h为普朗克常数;m、e为电子质量和带电量;φ为势垒高度;S为有效隧道通道平均截面积;N与D分别为有效导电通路数目和导电粒子间隙,都是关于应力σ的函数;M为一条有效导电通路上的平均导电颗粒数目。此模型可以较好的解释试验获得的力-阻特性,但尚无法定量计算;从式(1)可知,导电电阻与导电通路数成反比,与导电粒子间隙成正,导电通路数N越大,电阻值R越小;导电粒子间隙D越大,电阻R值越大。
借助上述模型,将本文薄膜试样看作一维结构,建立导电通道模型,如图6(上)所示,炭黑颗粒在薄膜长度方向上通过相互接触与隧道效应两种导电模式形成导电通路,使得复合材料具有导电性[1]。
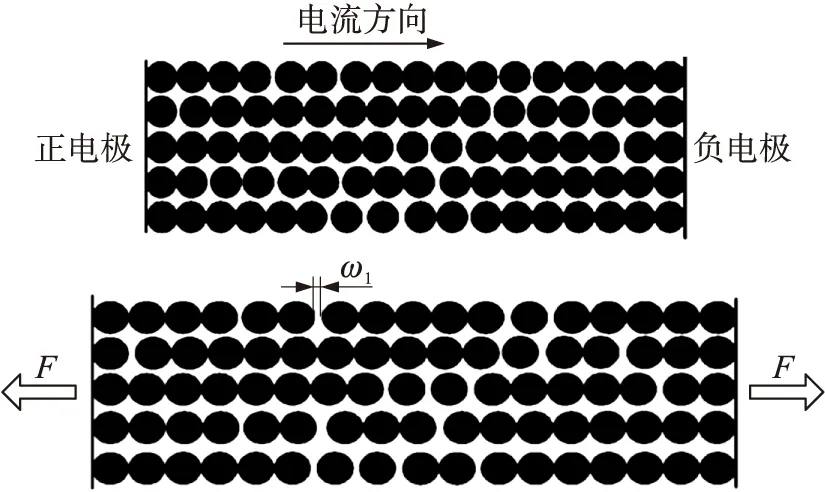
图6 导电通道模型示意图
当薄膜试样受到拉力后,在长度方向上产生伸长变形,电极之间炭黑颗粒组成的导电网络将整体受到伸长扰动,如图6(下)所示。此扰动主要表现在:①部分相互接触的炭黑颗粒受到拉伸后不再接触或转为隧道效应导电;②部分依靠隧道效应导电的炭黑颗粒之间的间距增大或变为断路状态。由于拉伸变形造成的这2种扰动,均会使得导电通路数减小,根据式(1),电阻将增大;另外,颗粒之间间距增大也将使得电阻增大。如图3与图4所示,在负温下各配方试样均具有优良的力阻敏感特性,电阻值随拉伸应变的增大而增大。硅橡胶是一种优质的高弹性橡胶材料,典型特点是可以在较低及较高的温度下使用,也是鉴于此,本文选择硅橡胶为基体制作传感薄膜试样进行负温力敏特性研究,从表1也可知,硅橡胶使用温度范围为-60 ℃~200 ℃,在此范围内材料可保持高弹性。图3与图4的曲线也说明了这一点,试样在-35 ℃、拉伸应变达到20%时,仍具有近似线性的力阻特性。
根据文献[1]中的研究结果,导电薄膜试样具有热敏特性,在不同温度条件下试样具有不同的电阻值。如图3中,各配方曲线斜率基本一致,但初始值不同,这主要是由于试样所处环境温度的不同造成的。可以认为,在所测量的温区内温度系数对力敏特性基本没有影响。
根据文献[18],炭黑颗粒填充量的增大使得导电网络更紧密,也更有利于导电网络的形成。炭黑填料越多,导电网络越稳定,越不容易产生破坏。如图6所示的导电通道模型,炭黑比例较高时,导电颗粒之间的平均距离将较小,相互接触的颗粒增多,导电通路数增多,导电网络更稳定。受到拉伸变形,高填充量的导电网络不易被破坏,电阻值变化趋势也将变缓。即炭黑含量越大,拉伸变形时试样的电阻值变化将越不显著,如图5所示,从C16到C18,曲线的斜率不断减小,灵敏度不断降低。
4 总结
①利用硅橡胶在低温下仍具有高弹性的特点,制作了炭黑/硅橡胶导电复合薄膜试样,对其进行了负温下的力敏特性试验研究。
②力敏测试结果表明,薄膜试样在负温下(最低温度达到-35 ℃)仍具有优良的拉伸敏感特性;试样电阻随拉伸变形的增大而增大,电阻与应变(最大应变达到20%)之间具有良好的线性关系。
③在-5 ℃~-35 ℃范围内不同负温条件下,炭黑/硅橡胶导电复合薄膜试样表现出基本一致的力敏特性;炭黑填料含量越大,试样的导电稳定性越好,灵敏度相应有所降低。
④制作的薄膜元件可满足较低负温、较大应变下的拉伸变形测试,线性度、稳定性都较好,具有开发负温条件下使用的新型传感器的优良性能。
[1] 廖波,周国庆,王英杰.炭黑/硅橡胶导电复合薄膜传感特性研究[J].传感技术学报,2013,26(8):1101-1104.
[2]Wang Luheng,Ding Tianhuai,Wang Peng.Influence of Carbon Black Concentration on Piezoresistivity for Carbon-Black-Filled Silicone Rubber Composite[J].Carbon,2009,47:3151-3157.
[3]徐菲.基于力敏导电橡胶的新型三维力柔性触觉传感器仿真研究[J].传感技术学报,2012,25(3):359-364.
[4]黄英,刘平,廉超,等.炭黑填充导电橡胶的温度传感器灵敏系数[J].复合材料学报,2012,29(3):30-35.
[5]刘平,黄英,廉超,等.炭黑填充导电橡胶的力敏传感器灵敏系数[J].复合材料学报,2012,29(1):16-20.
[6]刘平,黄英,廉超,等.基于炭黑填充导电橡胶的压力传感器非线性特性[J].高分子材料科学与工程,2012,28(8):72-75.
[7]廖波,周国庆,赵光思,等.胶基电敏复合材料传感技术实测加筋土墙的变形[J].煤炭学报,2012,37(2):221-225.
[8]樊尚春.传感器技术及应用[M].北京:北京航空航天大学出版社,2004.
[9]Chang L.微机电系统基础[M].黄庆安,译.北京:机械工业出版社,2007.
[10]Wang Luheng,Ma Fangfang,Shi Qaianshu,et al.Study on Compressive Resistance Creep and Recovery of Flexible Pressure Sensitive Material Based on Carbon Black Filled Silicone Rubber Composite[J].Sensors and Actuators A:Physical,2010.
[11]Wang Luheng,Ding Tianhuai,Wang Peng.Effects of Compression Cycles and Precompression Pressure on the Repeatability of Piezoresistivity for Carbon Black-Filled Silicone Rubber Composite[J].Journal of Polymer Science:Part B:Polymer Physics,2008(46):1050-1061.
[12]刘平,黄英,廉超,等.柔性触觉传感器用温度敏感导电橡胶的电阻-温度模型[J].高分子材料科学与工程,2012,28(6):107-109.
[13]黄英,刘平,黄钰,等.柔性触觉传感器用力敏导电橡胶力学灵敏度研究[J].复旦学报(自然科学版),2009,48(1):46-57.
[14]周国庆,廖波,赵光思,等.一种加筋带变形测试装置及其测试方法[P].中国专利:ZL200910029083.6,2009-1-19.
[15]王鹏,丁天怀,徐峰,等.炭黑/硅橡胶复合材料的压阻特性及改进[J].传感技术学报,2004(1):15-18.
[16]王鹏,丁天怀,徐峰,等.炭黑填充型导电复合材料的压阻计算模型及实验验证[J].复合材料学报,2004,21(6):34-38.
[17]吴菊英,黄渝鸿,范敬辉,等.炭黑/橡胶力敏复合材料压阻特性研究[J].橡胶工业,2010(57):34-38.
[18]廖波,王英杰.炭黑/硅橡胶导电复合材料微观结构及其导电特性[J].功能材料,2014,45(2):44-48.
廖波(1985-),男,博士,现为浙江工商大学技术与工程管理系讲师,2012年毕业于中国矿业大学,博士导师为周国庆教授,主要从事功能材料应用及岩土工程测试研究,liaobo2003@cumt.edu.cn。
TheForceSensingPropertiesofCarbonBlack/SiliconeRubberConductiveCompositesThin-FilmSampleintheNegativeTemperature*
LIAOBo1*,ZHOUGuoqing2,WANGYingjie2
(1.Department of Technology and Engineering Management,Zhejiang Gongshang University,Hangzhou 310018,China;2.State Key Laboratory for Geomechanics and Deep Underground Engineering,China University of Mining and Technology,Xuzhou Jiangsu 221008,China)
The force sensing properties of carbon black/silicone rubber conductive composites thin film were tested in the negative temperature.The results showed that the sample has excellent tension-sensitive characteristics even when the temperature reaches -35 ℃.The resistance of sample increases with tensile deformation(the tensile strain up to 20%),and there is a good linear relationship between the resistance and strain.The sample showed consistent force sensitive nature under different negative temperature conditions.With the increase of carbon content,the stability of the sample becomes better,but the sensitivity is reduced accordingly.The carbon black/silicone rubber conductive composites thin-film adapt to the tensile deformation test in negative temperatures and at large strain,and the linearity and stability are better.
carbon black;silicone rubber;force sensing properties;thin-film element;negative temperature
项目来源:国家“973”计划课题项目(2012CB026103);中国博士后科学基金项目(2014M551698)
2014-02-14修改日期:2014-05-24
10.3969/j.issn.1004-1699.2014.06.003
TU443
:A
:1004-1699(2014)06-0720-05