Design and skid analysis during the robot climbing the stairs of track robot with special structure*
2014-09-05JingZHANGJunjunZHANG
Jing ZHANG,Jun-jun ZHANG
College of Manufacture Science and Engineering,Southwest University of Science and Technology, Mianyang 621010,China
张 婧†,张俊俊
西南科技大学 制造科学与工程学院,四川 绵阳 621010
Designandskidanalysisduringtherobotclimbingthestairsoftrackrobotwithspecialstructure*
Jing ZHANG†,Jun-jun ZHANG
CollegeofManufactureScienceandEngineering,SouthwestUniversityofScienceandTechnology,Mianyang621010,China
To solve the instability of track robot in the process of climbing obstacles,a track robot with passive rocker was designed and the three-dimensional model of the robot was built by UG in this paper.Furthermore,the detailed skid theory analysis during climbing stair was made.The virtual prototype kinematics simulation for this robot was made by using the tracked vehicle subsystem of RecurDyn.The theory analysis and the simulation results verify the feasibility of the machine and provide some theoretical guidance for developing the obstacle performance of track robot.
Passive rocker,Track,Skid,RecurDyn
1.Introduction
Mobile robots are widely used in dangerous and harsh environments,such as investigation,inspection,surveillance,mine clearance and so on.The work environment for mobile robots can be complex,unknown and variable in natural condition.Track robots have strong ability to climb obstacles and to adapt work environment in complex circumstances.Thus the application of track robots is quite widespread[1-3].
Based on the independent track robot,a passive rocker mechanism is added in the front and rear of the robot body separately.When the robot climbs and walks down the stairs,the passive rockers in front and rear of the robot body cross the barrier first.The passive rocker as a transition plays an import role to robot for climbing obstacles and reduces the vibration of the robot body[4-8].The stairs is a common structural topography and the ability to climb stairs is one of the main indicators which measure the robot obstacle performance,thus there is some significance to study on slip problem during the robot climbing stairs[9-10].
2.The structure parameters of the track robot with passive rocker
The simplified UG model of the track robot with passive rocker is shown in Figure 1.The robot uses six motors independently drive each crawler in order to change the speed of the robot.An incomplete rotation pair is designed between the forearm rocker track and the main track as shown in Figure 2 to prevent the forearm track tipping backward.Then the rotation range of the forearm rocker track can be controlled.A worm gear reducer is designed between the drive motor of the forearm rocker track and the output shaft,then the forearm rocker track would act as reducing the vibration when the robot reaches the top of the stairs[11-13].
The mechanism motion diagram of the track robot with passive rocker is shown in Figure 3 and the specific dimension is shown in Table 1.As shown in Figure 4,the driving wheel 4 of robot body drives the rotations of main track 3 and rocker track 5.Then the main track 3 drives the rotation of driven wheel 2 of robot body and driven wheel 2 drives the rotation of rocker tracks 1.When the track 1,3,5 are the same speed and direction,the body would be able to complete the forward and backward movement because of the static friction force between the track and the ground.When the robot climbs obstacles,the forearm rocker tracks bear the static friction force and the pressure of obstacles and then the robot skip over obstacles until the torque generated by the forearm rocker track which is bearing external force to the rear wheel is greater than the torque generated by gravity.

Figure 1.The robot 3D model
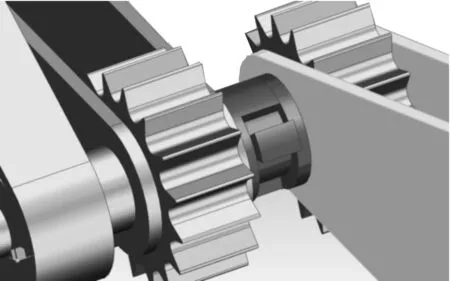
Figure 2.The incomplete rotation pair

Figure 3.The robot structure diagram

Table 1.The robot structure size parameters[mm]
3.The analysis on skid performance of the track robot with passive rocker
When the track robot with passive rocker climbs the stairs,the track robot will always be clockwise over torque determined by the size of the driving force and provided by the friction force between the forearm track and the stair and support force[14].At this point,one of the factors which affect the climbing process of the robot is the slip between the track and the ground.This paper takes process a and b movement which has most probability that robot slip in this step as the main analysis object.

Figure 4.The process of the track robot climbing stairs
3.1.Themotionprocessaoftherobotclimbingstairs
If the track robot with passive rocker can run properly on the slope of the stairs,the paper needs to ensure that the track robot dose not tip-over and does not slip on the stair slope.The height of a standard stairs single stephis 135 mm,the widthbis 310 mm and the slope angleαis 23.5°.As shown in Figure 5,the single track robot gravity isG0,the track length is 2L,the distance between the track bottom and the gravity in the middle of the track robot ish0,the angle between the single track robot and the horizontal surface ise,the support force and the static friction of the track at pointNare respectivelyF1andf1,and the support force and the static friction of the track at pointMare respectivelyF2andf2.According to the parameters of the track robot with passive rocker and the stairs,h0≥116 mm could be obtained.

Figure 5.The parameters of a single track
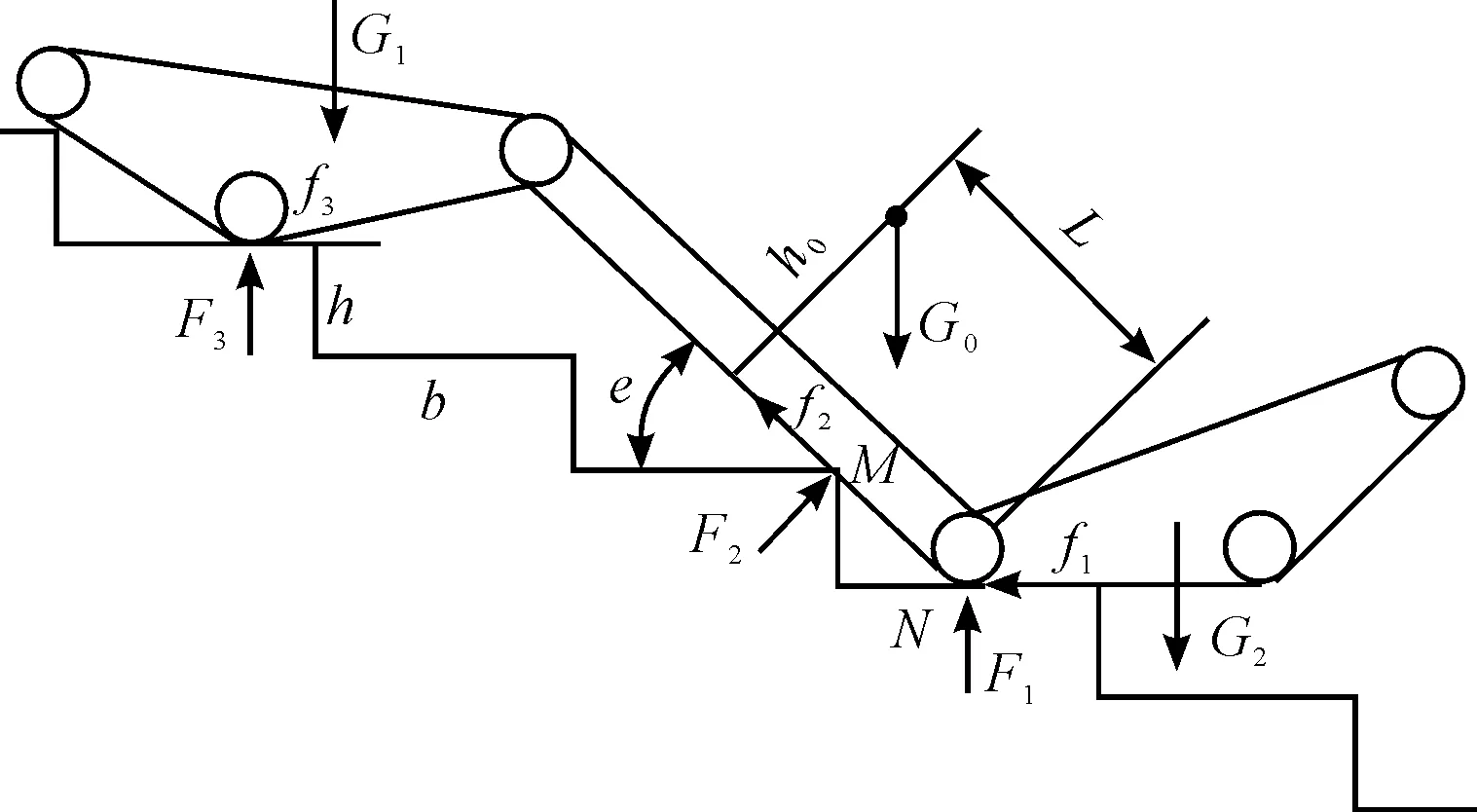
Figure 6.The parameters of the robot climbing the stairs process a
3.1.1.Thetiltingsituationofthesingletrackrobot
As shown in Figure 5,when the gravity center of the robot is on the right of pointN,the robot will tip over during the robot climbing the stairs.When the gravity center of the robot is on the left of pointM,the single track robot will transform the steady state creep.The paper sets the distance between the gravity center and pointNfor Δx(Δxis positive value when the gravity center is on the left of pointN) and the distance between the gravity center and pointMfor Δy(Δyis positive value when the gravity center is on the right of pointM).To the robot not tipping,emakes Δynot less than zero under the condition that Δxis not less than zero.
Δx=Lcose-h0sine≥0 (α≤e≤emax)
(1)

(2)


(3)

(4)

So,to make the Δyequal or not more than zero,thenh0≤ 208 mm
3.1.2.Thestaticfrictionbetweenthesingletrackrobotandstairs
Analysis Figure 5,then
f1+f2cose-F2sine≥ 0
(5)
According to △MONas shown in Figure 5,then

Carry on derivation for the above equation and simplify it,then

(6)
Because there is the same speed on the same track,there must certainly be a slipping on pointMand pointN.The sliding friction coefficientμbetween the track and the ground is 3 and the track speed should be equal to the larger speed.Because of the track rotation linear velocityνMN<νON,the pointMoccurs the slip phenomenon.Then
f2=μF2
Take the above equation into (5),then

(7)
μG0cosα≥G0sinα
α≤ 71.6° can be obtained,thenα=23.5° meets the condition.
According to the qualitative analysis as shown in Figure 6,the rocker track of the track robot with passive rocker has certain restrictions for the tilting and slippage of the main track and the track robot with passive rocker can normally move.
According to the analysis of the movement process a,the maximum slope angle of the track robot skipping over the stairs and other obstacles is not only related with the position of the gravity center of the track robot,driving force and the stairs step height,but also the friction coefficient between the track and ground.In the process of calculation,the scaling method is applied and the actual height of the gravity center will be greater than the value ofh0.
3.2.Themotionprocessboftherobotclimbingstairs
If the track robot with passive rocker can arrive at the top of the stairs steadily,the paper needs to analyze whether the track robot with passive rocker has a shock absorption effect during the motion process b,and whether there is an effect for the robot when the shock absorption fails.
As shown in Figure 7,this paper sets the track robot with passive rocker gravity toG0,the forearm track gravity toG1,the rear arm track gravity toG2,the distance between pointEand pointPtom,the distance between the gravity center of the track robot with passive rocker and pointPon the track vertical direction ton,the horizontal force of the forearm track and the main track at pointWtoFWx,and the vertical force of the forearm track and the main track at pointWtoFWy.The support force and the static friction of the main track on the steps are respectivelyFN0andfs0,the support force and the static friction of the forearm track on the ground are respectivelyFN1andfs1,and the support force and the static friction of the rear arm track on the steps are respectivelyFN2andfs2.This paper sets ∠WPE=α,∠WEP=β.ConsideringG1=G2< Figure 7.The parameters of the robot climbing the stairs process b Figure 8.The robot abnormal motion state When the friction between the track and the ground is very small,the track robot motion is slow and the track robot can be considered static balance.Take the forearm track as the analysis object and the driving wheel self-locking of the forearm track meets the conditions,then FN1-FWy= 0fS1-FWx= 0 FWx×Lsinβ-FWy×Lcosβ=0 According to the above equation and calculat,then FWy=FN1=fS1×tanβ (8) When the friction between the forearm track and the ground is static friction,thenfs1≤μFN1. When the track and the ground do not slip,combinefs1≤μFN1,and take it into equation (8),then According to the analysis of the Figure 7,ncosa=h0sinais the critical condition when the main track angle changes.At the moment,a=α=23.5°,that isn0=h0tanα= 0.43h0.The initial value ofmism0,andm0is that m0=(n0+L)×cosα+L×cos (9) (10) 3.2.1.Thelinearvelocitiesoftheforearmtrackandthemaintrackarethesame This paper sets the linear velocities of the forearm track and the main track forv.Ifβ>18.4°,when the track robot with passive rocker arrives at the top of the stairs,the track robot will always maintain the abnormal motion state as shown in Figure 8 in the horizontal plane. To avoid the abnormal motion state as shown in Figure 8,analyze △EWPas shown in Figure 7,then (11) Simplify equation (11),then (12) According to the equationα=23.5°,L=350 mm,n0=0.43h0and 116 mm ≤h0≤ 208 mm,take into equation (11) and (12),then 50 mm ≤n0≤ 89.4 mm According to the above equation,m0-n0>0 and 2L-m0+n0>0 can be obtained.The right of the equation (12) is the increasing function ofvt,thenβincreases with the increase ofvt.So when the linear velocities of the forearm track and the main track are the same,the robot is difficult to avoid the following conditions no matter how to adjust the location of the gravity center of the main track. 1)β>18.4° when the main track angle changes as shown in Figure 7,the track robot with passive rocker will always maintain the abnormal motion state as shown in Figure 8 in the horizontal plane. 2)β≤18.4° when the main track angle changes as shown in Figure 7,the forearm track and the ground slips,and the rocker arm does not play the role of shock absorption when the main track angle just recently changes. 3.2.2.Thelinearvelocityoftheforearmtrackisdifferentfromthelinearvelocityofthemaintrack This paper sets that the linear velocity of the forearm track isλtimes as big as the linear velocity of the main track.The paper sets the angle between the main track and the horizontal plane toa′to measure the vibration level of the track robot.If the forearm track loses the support function,a′should be as small as possible.According to the analysis for △EWPas shown in Figure 7,it can be gotten thata′is the least whenn=Landβ=18.4°,then (13) 2L=L+n0+vt (14) (15) According the equation (10),(11),(13),(14) and (15),then 116 mm ≤h0≤208 mm After the failure of the forearm track support,the whereabouts height of the center gravity of the main track is Δh0and Δh0=h0cosa′+Lsina′-h0. Combined with the parameters of the paper,then 52.7 mm ≤ △h0≤ 53.9 mm According to the analysis of the movement process b,the main factor affecting the track robot with passive rocker shock absorption is not only the maximum static friction coefficient between the track and the ground,but also the linear velocities of the forearm track and the main track during the movement process b.In addition,the gravity ratio of the rocker track and the main track and the position of the gravity center of the main track have a certain influence for the damping effect of the track robot with passive rocker. The virtual prototype three-dimensional multi-body dynamics model of the track robot with passive rocker was set up by using the tracked vehicle subsystem of multi-body dynamics simulation software RecurDyn and kinematics simulation for the robot was made[15].The simulation process is shown in Figure 9. The simulation analysis results in Figures 10~12 show that the track robot with passive rocker has slight vibration when the robot climbs the stairs because of the connection between the mass center height and the length of the track robot with passive rocker.When the robot climbs to the top of the stairs,the gravity center of the robot only generates a faster decline in small pieces and the simulation results show that the track robot with passive rocker can successfully climb the stairs. Figure 9.The track robot RecurDyn simulation Figure 10.The robot centroid displacement(x: t(s),y: v (m/s)) Figure 11.The robot centroid speed (x: t(s),y: v (m/s)) Figure 12.The robot centroid acceleration(x: t(s),y: v (m/s2)) In this paper,the structure of single track robot was improved.The passive rockers were added in front and rear of the track robot body to reduce the vibration of crossing obstacle.The reduction of vibration of the track robot with passive rocker is completed as the transition in the process of obstacle negotiation by controlling the rocker track speed and using the friction between track and the ground.The track robot with passive rocker needs to across the boss,trenches,the stairs and so on when it works,so the slipping problems will appear inevitably.According to the third section analysis,the track robot with passive rocker can successfully cross obstacle as long as the gravity center of the robot is in the proper range.At the same time,the simulation results provide certain instructive for design and obstacle performance of track robot by RecurDyn. [1]Jinmeng M A,Xiaofan LI,Chen YAO,et al.Dynamic Modeling and Analysis for Obstacle Negotiation of Ground Mobile Robot[J].Robot,2008,37(3): 273-278. [2]Haifeng FANG,Shirong G E,Yunwang LI.Obstacle Performance Analysis of Four track Robot with Compliant Swing Arms[J].Journal of China University of Mining &Technology.2010,5(39): 682-686. [3]Chaoyang Wang,Miao Hu,Yonghong Tang.Design and Analysis of Surmounting Obstacle Function for Wheel track Mobile Robot[J].Mechanical transmission,2010,4(36): 38-41. [4]Jinjun LU,Laisheng WEI,Taoshuo ZHAO.Dynamic Simulation of Tracked Vehicle Turning at High Speed Based on RecurDyn[J].Modern Machinery,2008(1):10-12. [5]Guang HAN,Tianmiao WANG,Jianhong LIANG.A modularized reconfigurable pedrail structure for effective stair climbing[J].Robot,2004,26(5): 400-403. [6]MutkaA,Kovacic Z.A Leg-wheel Robot-based Approach to the Solution of Flipper-track Robot Kinematics[C].Proceedings of 2011 IEEE International Conference on Control Applications (CCA),Denver,CO,USA.,2011. [7]Fu Q,Krovi V.Articulated Wheeled Robots: Exploiting Reconfigur ability and Redundancy[C].Proceedings of 2008 ASME Dynamic Systems and Control Conference,DSCC2008-130,Ann Arbor,Michigan,USA.,2008. [8]Hirose S.Mechanical design of a mobile robot for external environments[J].Journal of Robotics Society,2000,18(7). [9]Yanhua W U.Research on Chian Robot Obstacle Crossing[J].MACHINE TOOL AND HYDRAULICS,2009,37(2): 21-24. [10]Zongyao CHEN,Guozheng YAN,Kundong WANG et al.The Performance Optimization of the Articulated Tracked Pipe Inspected Robot for Obstacle Negotiation[J].JOURNAL OF SHANGHAI J IAOTON G UNIVERSITY,2011,45(7): 1018-1020. [11]YanShen Wang,LianZheng Ge,PingChun Xie et al.Dynamic Simulation and Gravity Balancing Optimization of Spot Welding Robot Based on RecurDyn[J].Mechatronics and Automation (ICMA),2011,1905-1910. [12]Peng Jia,Yumei Huang.Behavior-based Avoiding Barriers System of Mobile Robot[C].IEEE World Congress on Software Engineering,2009,11: 106-112. [13]Bing WU.Three-dimensional Modeling and Simulation of Catamaran Crawler Obstacle Robot[J].Neijiang Technology,2011(10): 145. [14]Haifeng FANG,Shirong GE,Yunwang LI.Obstacle Performance Analysis of Four-track Robot with Compliant Swing Arms[J].Journal of China University of Mining and Technology,2010,39(5): 682-686. [15]Zhiqing Li,Shugen Ma,Member,et al.Kinematics Analysis of a Transformable Wheel-Track Robot with Self-adaptive Mobile Mechanism[J].International Conference on Mechatronics and Automation,2010(8): 4-7. 一种特殊结构履带机器人设计及爬楼梯打滑性分析* 针对履带机器人在越障过程中出现的不稳定问题,设计了一种特殊结构的被动摇臂履带机器人。用UG建立了履带机器人的三维模型,对其在越障性能之一的爬楼梯过程中进行了打滑性理论分析,并通过多体动力学软件RecurDyn进行了运动学仿真,从而验证了该机构的可行性,为被动摇臂履带式机器人的发展提供了依据。 被动摇臂;履带;打滑;RecurDyn TP242 2013-10-15 *Project supported by Sichuan Province Science and Technology Support Program (2013GZ0152),2013 Sichuan Province Department of Education Program (13ZA0164),The Defense Key Discipline Laboratory Program (11ZXNK02) † Jing ZHANG,E-mail: 841226398@qq.com 10.3969/j.issn.1001-3881.2014.06.018 张 婧†,张俊俊 西南科技大学 制造科学与工程学院,四川 绵阳 621010




678.4 mm ≤m0≤ 706.1 mm



4.The simulation analysis of the track robot with passive rocker


5.Conclusion
猜你喜欢
杂志排行

机床与液压的其它文章
- A Sort of fusion control strategy for uncertaintycomplex process with large time lag*
- Design and implementation of a wireless electronic inverterwelding machine*
- Design and characteristic research of double-acting aircraftdeicing fluid pump*
- Preliminary research on the design of flexible barriersfor debris flow
- Numerical simulation of the double suction balance type screw compressor working process*
- Control of EPS with regulating factor