两种地震预警定位方法的比较
2014-09-04李军金星张红才韦永祥关玉梅
李军 金星 张红才 韦永祥 关玉梅
1)福建省地震局,福州市华鸿路7号 350003
2)中国地震局工程力学研究所,哈尔滨 150080
3)福州大学,福州 350018
0 引言
地震定位是地震学中的一个基本问题,其主要任务是精确确定震中位置、震源深度以及发震时刻。但在地震预警中,快速而且可靠的定位则是决定地震预警成功与否的首要问题。传统地震定位方法难以满足地震预警对时效性的要求,为此,国内外发展了多种快速定位方法。Nakamura等(1988a、1988b、1989)提出在P波达到后,用平滑后的水平向幅值比和垂直向符号确定震中方位角,由P波卓越频率估计震级,由初始信息的幅值与震级和距离的衰减关系确定震中距。该方法为经验性方法,且定位中用到了由P波卓越频率估计得到的震级,因此定位误差很大。虽然该方法具有较大的局限性,但其在日本UrEDAS系统的成功应用促进了地震预警技术的发展。Odaka等(2003)将垂直向P波前3秒记录的绝对值用指数函数Bt·exp(-At)进行拟合,其中t为P波到时,A和B均为需拟合的参数,B值的大小与震中距相关,加上震中方位角即可定位,该方法也为经验性方法,误差同样较大。Wu等(2002)应用台湾强震台构建虚拟子网,应用传统单层地壳速度模型方法进行定位,时效性较差,预警盲区较大,多用于异地预警。Rydelek(2004)发展的双子台定位方法可以依据两台P波到时差以及其他未触发台站的位置信息,把震中限制在双曲线的一段上。Horiuchi(2005)在该方法的基础上,用当前时刻Tnow界定已到台与未到台,用网格搜索法确定残差最小的点为震中。目前,该方法定位结果的可靠度相对较高。
在国内,金星等(2012)充分考虑国内地震台网的现状以及今后的发展趋势,提出了4台连续定位方法,该方法实现了随信息的更新对定位结果的持续修正。
首台触发时,Tnow定位方法和4台连续定位方法均采用“Voronoi剖分”(Satriano et al,2008)定位,随时间进程逐步排除不满足触发条件的区域。双台触发后,震中位置可限制在一段双曲线上,同样随时间进程逐步排除不满足触发条件的区域。单台或双台地震定位结果都存在一定偏差,当触发台站达到3台或4台以上时,定位结果的可靠度较高。本文根据福建地震台网的地震目录对两种地震预警定位方法进行了检验。
1 定位方法简介
1.1 Tnow定位方法
地震发生后,离震中最近的两个台站记录到P波后,可确定震中位于一段双曲线上,该双曲线段与这两个台站的位置、P波到时以及P波速度有关,假定经过一段时间后其他台站也可以记录到地震P波,地震震中和发震时刻就要满足

其中,Tnow为当前时刻,Ti为第i个台站的 P波理论到时,φ,λ,h,t分别为震中纬度、震中经度、震源深度和发震时刻,为第i个台站时间延迟的总和,包括信号传输时间、系统处理时间等。
对于已经触发的台站,定义走时残差为

其中为第j个台站的实际P波到时。
定义未触发台站的走时残差为

ε0是一个小的正数,ε(Δ,h)由(4)式确定,即

Np为已经记录到P波信息的台站个数,h0,a,b分别为10km,0.01s/km和0.01s/km。对可能的震中区域划分网格,并计算所有台站走时残差的加权平方和

WPj、Wni分别为已触发台站和未触发台站的权重值。式(5)的最小值所对应的网格即为震中。
1.2 4台连续定位方法
该方法以首个触发台站S1所在位置为坐标原点,以S1至第2个触发台站S2的方向为X轴正向建立坐标系,根据右手定则确定Y轴正向,此时,前3个触发台站在坐标系内的位置分别为(0,0),(d12,0),(x3,y3),d12表示 S1与 S2台站间的距离,x3,y3为第 3 个触发台站S3的坐标。假定P波速度恒为Vp,前3台的P波到时分别为Tp1、Tp2、Tp3,第2台、第3台与首台的震源距之差分别为S21和S31

将震中距、震源距等带入上式并进行简化(金星,2012),可得

参数p1,p2,b1,b2的表达式分别为
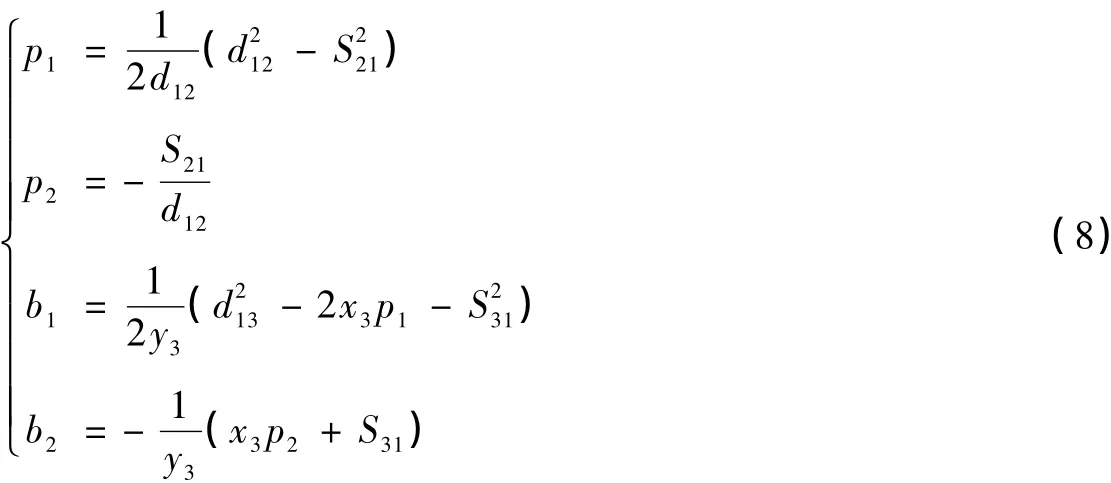
式中,d13为首个触发台站S1至第3个触发台站S3的距离。式(7)表示由3个台的P波到时信息可以将震中限制在一条有限长度的直线段上。实际上,它是一条包含震源深度的空间曲线,仅由前3个台的P波到时信息也不能准确确定震中位置,但如果假定震源深度或捡拾到第4台P波到时信息后则可以计算得出震中位置。
2 地震事件的选取
地震预警主要对大震效果明显,但大震数量较少,有地震记录的大震数量更少,利用仅有的少量大震记录对地震预警的定位效果进行检验显然是不够的,因此本文计划利用历史地震目录对地震预警定位方法进行检验。由于地震预警主要是利用近场记录对大地震进行快速测定,而大地震破裂尺度较大,近场往往无法记录到清晰的S波到时信息,因此本文只利用地震目录中的P波到时进行分析。考虑到地震预警实时处理过程中可能无法区分Pg与Pn震相,因此本文处理过程中未区分这两种震相。
本文利用福建地震台网1999~2008年9月的地震目录,选取至少有4个台记录到P波震相的地震事件,利用各个地震事件前4台的P波到时对两种定位方法进行检验,经过筛选,选定地震事件共计5920个,震中分布如图1所示。
3 定位结果分析
3.1 Tnow定位方法的定位结果分析
本文利用Tnow定位方法对筛选后地震事件重新定位,搜索范围为首台2000km范围内,震源深度为0~700km,采用华南模型(范玉兰,1990)计算理论走时。结果发现,采用Tnow定位方法无法定位的地震事件有152个,约占地震事件总数的2.6%。由于Tnow定位方法需要未触发台站的位置信息,因此,在地震定位时,正确的台站触发顺序和触发时间对地震定位结果有较大影响,地震目录信息中并不包含台站运行状态,因此本文筛选的地震事件可能存在部分台站因断记或震相记录不清晰等原因而未在地震目录信息中体现。本文对所有的地震事件,按照地震目录中的震中重新计算了理论触发前5个台的到时顺序。结果发现利用Tnow定位方法无法定位的152个地震事件中,有84个地震事件理论触发的前5台中只有小于等于2个台的记录在地震目录中得到体现,这可能是由于台站运行状态出现异常,也可能是由于地震太小,P波震相不清晰引起的。该部分地震事件占所有不能定位事件中的大多数,由此可以看出,利用Tnow定位方法不能定位的主要原因是由于台站触发顺序出现了错误。在实际地震预警中,错误的震相捡拾也将引发这种错误,另外,部分台站出现断记、信号传输延迟或显著增大等异常也可能引起这种错误。
为进一步分析地震定位结果,本文根据所有台站的外包线将地震事件分为网内地震和网外地震,其中网内地震事件1418个,网外地震事件4502个。
对于网内地震,不能定位的地震事件有6个,只占地震总数的0.4%。与地震目录中的震中偏差如图2(a)所示,图中横坐标为首台至地震目录中震中的距离,纵坐标为震中偏差。结果显示,定位最大偏差160km,991个事件定位偏差小于10km,占事件总数的70%,1355个地震事件震中偏差小于30km,占事件总数的96%,平均偏差约9.4km,方差为11.4km,可见,采用Tnow定位方法定位偏差较小。
对于网外地震,不能定位的地震事件有146个,数目较多。与地震目录中的震中偏差如图2(b)所示。结果显示,定位最大偏差达1200km,1837个地震事件小于100km,占事件总数的42%,270个地震事件大于300km,占事件总数的6%,定位偏差相对较大。图中还显示,随首台至地震目录震中距离的增大,定位偏差也有所增大,这可能和台站相对于震中偏向一侧有关,地震越远,参与定位的台站与地震之间的张角越小。在首台震中距为200~300km时,有一部分地震事件的定位偏差较大,具体原因尚不清楚,作者拟对这些地震事件作进一步分析。
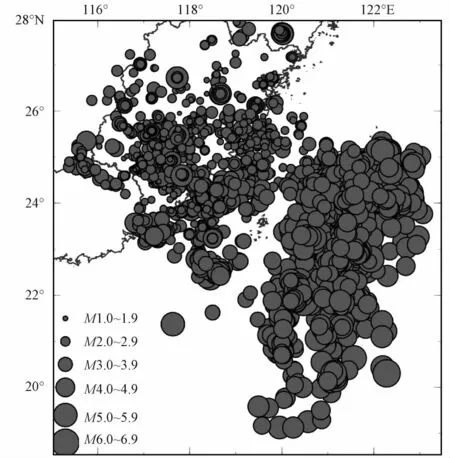
图1 地震事件震中分布图
3.2 4台连续定位方法结果分析
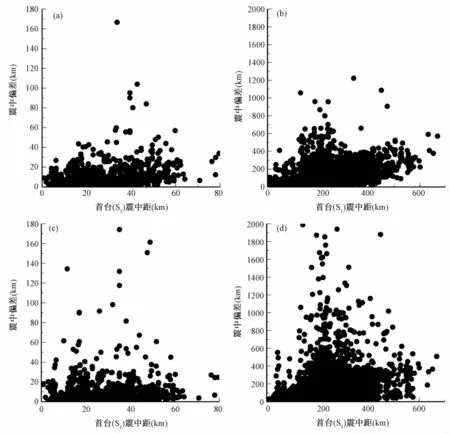
图2 两种定位结果的震中偏差
采用4台连续定位方法处理1418个网内地震,结果如图2(c)所示,其中不能定位地震事件1个;震中偏差大于100km的事件18个;小于10km的事件1076个,占事件总数的76%;小于30km的事件1355个,占事件总数的96%;平均偏差11.1km,方差35km。总体而言,4台连续定位方法的定位结果与Tnow定位方法相差不大,但由于部分地震事件的定位偏差较大,导致平均偏差和方差比Tnow定位方法相对要大一些。
网外地震定位结果如图2(d)所示,其中不能定位事件有42个;定位偏差大于1000km的事件37个;小于100km的事件1670个,占事件总数的37%;大于300km的553个,占事件总数的12%。同样,随首台至地震目录震中距离的增大,4台连续定位方法的定位偏差也有所增大。与Tnow定位方法相比,定位偏差较大的地震事件略多些,这可能和两种方法选择的波速结构有关。对于网内地震,4台连续定位方法波速局部均匀的假定可能比较合理,而对于网外地震,波速结构对定位结果的影响可能较大,这可能会导致该方法对网外地震的处理会存在一定的局限性。
3.3 两种定位方法的对比
本文对两种定位方法均能定位的地震事件的定位结果进行了对比分析(表1),结果表明,对于网内地震,两种方法的定位结果相差不大,大部分定位偏差小于30km,但4台连续定位方法定位偏差大于50km的地震事件相对多些。对于网外地震,两种方法定位偏差小于100km的地震事件数目相差不大,但Tnow定位方法定位偏差小于200km的地震多些,这可能与Tnow定位方法用了未触发台站的位置信息,对震中有更多的约束有关。

表1 两种定位方法的对比
4 认识及讨论
本文根据福建地震台网的地震目录,选取至少有4台记录到P波的地震事件,利用各个地震事件前4台的P波到时信息对Tnow定位方法和金星等(2012)提出的4台连续定位方法进行检验,结果表明,采用Tnow定位方法不能定位的地震事件相对较多,这可能是由于地震较小或地震发生时台站运行状态出现异常导致不能识别P波震相引起的。在实际中,正确的台站触发顺序和触发时间对Tnow定位方法的定位结果可能会产生一定的影响。
对于可以给出定位结果的地震,两种方法的定位结果相差不大,大部分地震事件的定位偏差较小。但波速结构可能会对方法的应用有一定影响。对于网内地震,因台站对震中的包围较好,波速模型对定位结果的影响相对较小;但对于网外地震,台站相对于震中都偏于一侧,选择与实际波速结构接近的波速模型将有助于改善地震定位结果。
在实际地震预警中,可能需要综合考虑两种定位方法的局限性,例如,Tnow定位方法对地震台站运行状态的实时监控要求很高,需要系统能够非常快速的识别地震台站的运行状态,同时,网络延时等对Tnow定位方法的应用也将产生一定影响,尤其是大地震发生时,数据传输量突然增大,网络中的其他数据信息明显增多,这将对网络传输速度产生影响。而4台连续定位方法只利用已触发台站的到时信息,网络延迟、台站断记等异常对定位结果影响不大;但该方法没有应用其他未触发台站的信息,对震中的约束较小,定位偏差可能会较大甚至出现震中位置不合理的现象;波速均匀的假定也可能导致该方法对网外地震的处理存在一定的局限性。综合考虑上述两种定位方法的定位结果并进行一定的优化组合可能有助于提高地震预警系统的可靠性和稳定性。除此之外,可能还要考虑震中位置、振幅、卓越周期、实时仪器烈度等参数之间是否相互匹配。