连江西牛航运枢纽工程双向门式启闭机设计
2014-09-03陆海军杨美洁
陆海军 杨美洁
(中水珠江规划勘测设计有限公司 广东广州 510610)
1 工程概况
随着启闭机技术的大力推广及应用,门式启闭机在水利、水电建设,火电建设,航运建设,港口运输上的应用越来越广。连江西牛航运枢纽工程地处广东省连江下游,位于西牛镇上游3km处,上距架桥石枢纽12.3km,下距连江口35.4km。电站厂房为挡水建筑物的一部分,厂房进水口在约90m长度的大坝范围内布置有3台3.3MW灯泡贯流式机组,呈一列式布置,3台机组共设3扇进水口检修闸门和3扇拦污栅。在电站厂房进水口平台顶部38.5m高程,设置了一台2×800kN双向门式启闭机(以下简称门机),运行在整个厂房段约88m长度范围内。
门机主小车起升机构设有高低两种起升速度,高速用于启闭液压清污耙斗进行清污,低速用于启闭进水口检修闸门和拦污栅。闸门、拦污栅在水下的自动挂脱分别通过进水口检修闸门液压自动抓梁、拦污栅液压自动抓梁来完成。厂房机电设备的卸车和吊运安装通过主起升机构配平衡梁来进行。
2 总体设计
2.1 主要组成部分
门机主要由以下部分组成:主小车、大车走行机构、门架、副起升机构、司机室、电缆卷筒、夹轨器、小车供电装置、液压自动抓梁、平衡梁、液压清污耙斗、轨道、电气设备等,如图1所示。
2.2 主小车
主起升机构、小车走行机构、小车架、小车罩、检修吊、小车锚定装置、夹轨器等组成主小车。主小车移动方向平行于水流向并与门机大车轨道垂直。
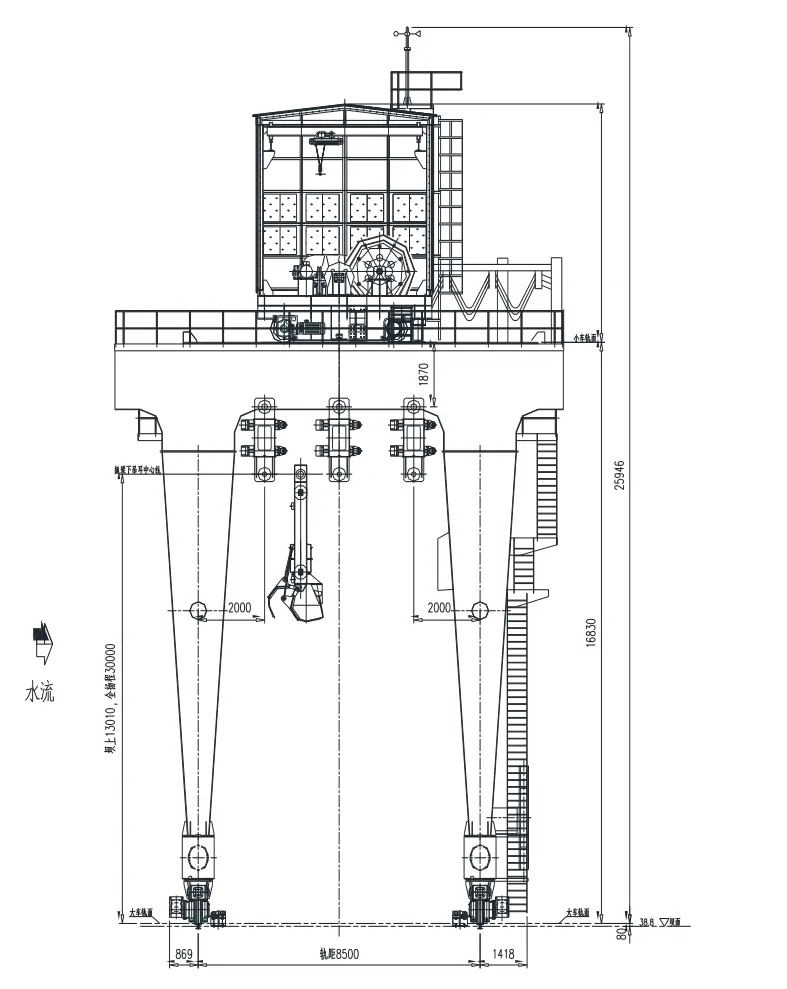
图1 门机总图
2.2.1 主起升机构
主起升机构采用双卷筒同轴线分别驱动布置方案,两套起升机构各自有一台电动机通过高速轴带动减速器,减速器低速轴驱动开式齿轮,通过开式齿轮变速后,驱动卷筒旋转,收放缠绕在卷筒上的钢丝绳,带动动滑轮装置、液压自动抓梁及闸门上升或下降。起升减速器采用中硬齿面起重机用底座式减速器传动,齿轮齿面接触强度较传统软齿面减速器大有提高。在启闭机重载运行时,能够有效避免减速器齿轮点蚀和胶合破坏的产生,设备的安全和可靠性得到提高。两套起升机构在减速器低速轴处用联轴器刚性联接,保证双吊点在运行过程中机械同步。减速器高速轴上,设置了一套工作制动器,采用电力液压块式制动器。主起升机构主要技术参数见表1。

表1 主起升机构主要技术参数表
主起升机构要求设两档运行速度,运行速度差别较大。设计中原来考虑采用双速电机,直接启动,通过切换电动机的两个不同绕组,实现变速。但存在以下缺点:每档速度为固定值,档与档之间不能再进行高中低档的调速,满足不了运行要求;直接启动,电动机电流大,机构运行振动大。最终采用了变频电机加变频器控制设计,既能满足多级调速要求,又能确保机构运行平稳。变频电动机1~50Hz时为恒转矩调速,启闭闸门,50~100Hz时为恒功率调速,启闭清污耙斗清污。
主起升机构的钢丝绳采用了螺旋绳槽卷筒单层缠绕的方式。主要考虑以下因素:
(1)总起升扬程30m,属于中低扬程;
(2)门机承担厂房机电设备的安装任务,对双吊点的同步要求高,采用螺旋绳槽卷筒单层缠绕能更有效保证双吊点的同步性。
双吊点启闭机影响吊点同步因素包括:卷筒的转速、卷筒直径误差、钢丝绳缠绕的不均匀性和钢丝绳直径允许偏差等。其中钢丝绳缠绕的均匀性是关键因素。当卷筒采用多层缠绕时,起升机构双吊点只有在缠绕第一层钢丝绳时在绳槽的约束和导向下能保持可靠同步。在第二层及以上各层缠绕时,由于没有了绳槽,不能保证钢丝绳会缠绕均匀,有可能在某个位置上或在某时出现钢丝绳跳槽乱绳,两卷筒出现该现象的位置和时机不一样,当两卷筒同时旋转一圈,两卷筒上缠绕的钢丝绳的长度是会有差异的,误差较大时就会引起两个吊点升降不同步。钢丝绳缠绕越多层数,出现不同步的机率和程度就越大,所以为了保证钢丝绳缠绕均匀应选用单层缠绕。同时设计中还要求对钢丝绳采取预拉伸处理措施,目的是消除钢丝绳内部间隙, 使其结构趋于稳定,提高2根钢丝绳缠绕时的同步精度。
2.2.2 小车走行机构
小车走行机构采用分别驱动,共设4个走行轮,2个主动轮,2个从动轮。主动轮采用〝三合一〞减速装置全封闭传动,电动机、制动器、减速机三合一体,电机带防雨罩。小车走行机构中设置有行程限位装置、当小车行走至极限位置时,可自动切断小车走行机构的电源来进行限位保护。小车走行机构主要技术参数见表2。
2.3 副起升机构
采用CD1 10-24D电动葫芦作为副起升机构,可启吊坝面上零星物品,启闭力100kN,总扬程为 24m,启闭速度 7m/min。电动葫芦布置在门机上游左侧,可沿门架主梁方向行走,行走速度20m/min。门架上部设有副起升检修平台。
2.4 大车走行机构
大车走行机构共四组,每组结构型式相同,由走行台车、支承架、缓冲器、夹轨器、行程开关等部件组成,分别安装在四个门腿对应的下横梁下部。每组走行机构由一套走行台车通过铰轴和支承架连接,支承架通过法兰与门架下横梁连接。每套走行台车由一个主动轮和一个从动轮组成,每个主动轮的驱动装置采用一套 TAF“三合一”减速器全封闭传动。大车走行机构共设走行车轮8个,其中主动轮4个,从动轮4个。大车走行机构主要技术参数见表3。
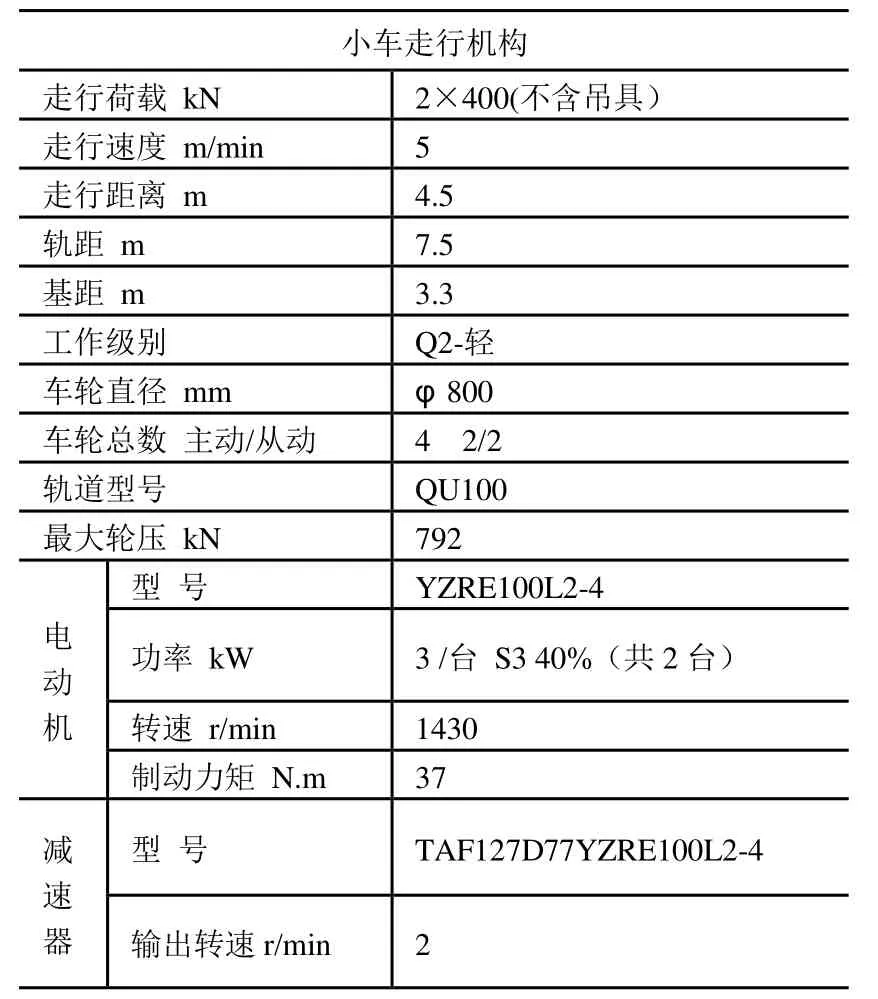
表2 小车走行机构主要技术参数表
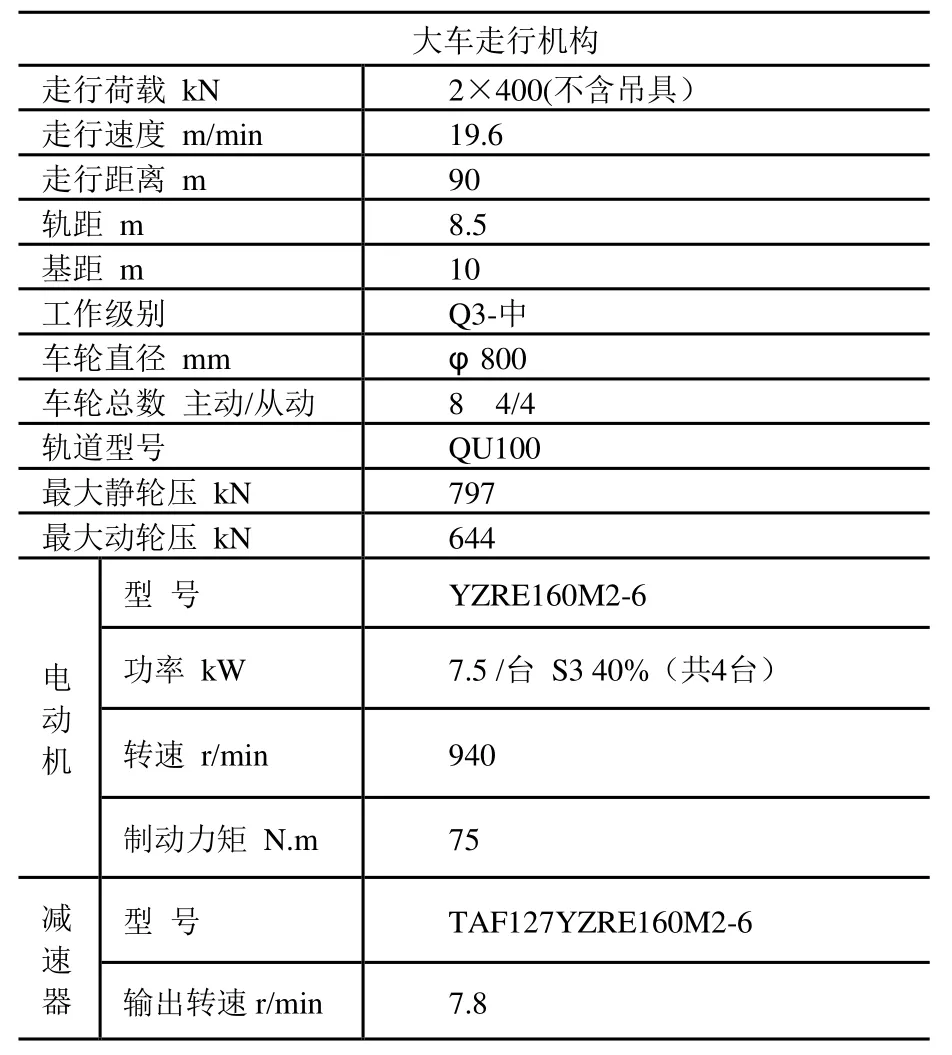
表3 大车走行机构主要技术参数表
2.5 门架
门架由上平台、门腿、下横梁、中横梁、梯子和栏杆平台等构件组成。它们之间构成三个互相垂直、各节点为刚性的空间框架。主框架即轨距平面,由主梁、门腿组成为∏型;侧框架即基距平面,由端梁、门腿及下横梁组成等腰梯形;上平台框架由主梁及端梁组成的矩形框架。
为了制造、运输、安装方便,端梁与主梁之间采用高强螺栓连接。门腿上端与上平台之间采用单片法兰焊接,下端与下横梁之间采用双法兰螺栓连接。中横梁与门腿之间采用高强度螺栓连接。梯子和栏杆平台等安装时现场焊接。
2.6 液压自动抓梁和平衡梁
液压自动抓梁采用全行程液压自动穿轴型式,由自动抓梁体、液压穿轴装置、液压泵站装置及管道、检测装置、电控设备等组成,其上吊耳与主起升机构动滑轮组连接,下吊耳设有液压穿轴装置,以实现该自动抓梁与闸门间的自动穿轴与退轴。液压自动抓梁采用电缆卷筒供电,电缆卷筒可自动保持与起升机构吊具的同步升降。
平衡梁配 500kN吊钩用于电站机电设备的垂直进厂吊运及安装。
2.7 液压清污耙斗
液压清污耙斗由耙斗架、油箱、油缸、转耙和铲齿等组成,通过油缸活塞杆的伸缩带动转耙转动,实现抓取和释放污物。耙斗容积8m3,耙斗宽度8.85m,吊点距为4.5m,可直接与主起升机构的动滑轮连接。液压清污耙斗与液压自动抓梁共用电缆卷筒供电。
3 运行和设计特点
3.1 运行特点
门机的大车走行机构、小车走行机构、主起升机构、副起升机构、检修吊、液压清污耙斗机构之间均两两互为闭锁,防止误操作,其中任一机构工作时,其余机构均闭锁。门机主要操作都在司机室内进行。
门机设小开度行程(200mm)预置,满足充水阀行程要求。
钢丝绳缠绕方式、动滑轮装置、液压自动抓梁满足闸门操作和闸门门槽尺寸要求。
门机大车及小车走行荷载限定为2×400kN,当超载时,走行机构将自动断电停止。
3.2 设计特点
为了保证启动、制动、运行平稳,门机主起升机构采用了变频调速设计,电动机使用变频电机,重载时低速采用恒转矩调速(1~50Hz),轻载时高速采用恒功率调速(50~100Hz);变频电机加变频器的控制方式,实现了主起升机构无级变速的启闭功能。
门机主起升机构采用了螺旋绳槽卷筒钢丝绳单层缠绕等措施,使钢丝绳在卷筒上均匀缠绕,保证了双吊点的同步性,确保了起升机构的安全运行。
门机的小车、大车走行机构均采用了“三合一”减速装置,电动机、制动器、减速机三合一体,该装置具有模块化设计、传动比范围广、安装形式多样、强度高、体积小、使用寿命长、噪声低、传动效率高、维护方便等特点。
连江西牛航运枢纽工程2×800kN双向门式启闭机已制造安装完毕,并通过验收,投入使用多年,至今运行良好,设备应用结果表明,门机的设计是成功的,可为今后同类型的设计工作提供参考。
1 成大先. 机械设计手册. 北京: 化学工业出版社, 2008.
2 张质文, 王金诺等. 起重机设计手册(第二版). 北京:中国铁道出版社, 2013.
3 《起重机设计规范》(GB/T3811-2008). 中国标准出版社2008.
4 《水利水电工程启闭机设计规范》(SL41-2011). 中国水利水电出版社. 2011.