西安地铁2号线电动客车HRDA制动系统
2014-09-03史富强
史富强
(西安铁路职业技术学院 陕西 西安 710014)
西安地铁2号线电动客车HRDA制动系统
史富强
(西安铁路职业技术学院 陕西 西安 710014)
对西安地铁2号线地铁车辆采用的日本NABTSCO公司的HRDA制动系统的原理、功能和主要组成部件、控制作用的原理与过程进行了分析,总结出西安地铁2号线采用HRDA型制动系统的主要特点和HRDA制动系统应用前景。
西安地铁2号线;HRDA;控制过程;特点;应用前景
西安地铁2号线是由长春轨道有限责任公司生产的具有车内先进水平的地铁电动客车,为提高其制动性能上采用了日本NABCO公司的HRDA型电空制动机。HRDA型电空制动机的控制技术能适应地铁列车站间距离短,列车起动制动频繁的特点,HRDA型电空制动机的控制技术水平在世界上是较为先进的。它在本车制动力的计算、车辆之间交叉混合制动力的计算与分配、电制动与空气制动力的控制及监控、防滑等控制方面均采用微机进行控制,所以提高了系统的响应速度和控制精度[1]。
HRDA空气制动系统是日本的Nabtesco公司为适应城轨车辆发展的需要研制了一套采用微机控制的模拟式电—空制动系统,内设监控终端,具有自诊断和故障记录功能,系统采用车控方式,是一套高应答性、高可靠性的电气指令式制动系统,以事故导向安全为设计原则,对列车的运营提供充分的安全保障。主要特点如下:在常用制动、紧急制动功能的基础外,增加了防滑控制功能;能与 ATP系统配合控制;实现了动车和拖车之间制动力的交叉混合及电空制动的协调配合,优先充分使用电制动,不足部分的空气制动力是通过反馈来控制的,精度更高;采用微机控制,最大限度地满足控制精度和乘坐舒适性的要求等[2]。
1 HRDA制动系统的主要组成
HRDA制动系统主要由供风系统、制动控制系统组成,其中制动控制系统中的制动控制单元为HRDA制动的核心部件。
1.1 供风系统
供风系统由空压机、干燥器、空压机启动装置、冷却器、干燥器、滤清器、储风缸、安全阀、总风压力开关(包含于BCU中)、压力调节装置等组成。供风系统为制动系统提供的干燥、足够的压缩空气。整列车配备两套供风系统,其总能力能够满足整列车在各种工况的用风需求,一般情况均留有一定的裕度,以保证在个别特殊情况下整列车制动性能的安全。总体看来,该项目风源系统的集成度较低、所占空间大,给整车的设备布置带来较大困难。
1.2 制动控制系统
每辆车配备一套制动控制装置(其中头车制动控制单元内部配备有总风低压压力开关,此信号将串联至紧急回路),用于进行带有空重车调整的常用制动和紧急制动以及滑行保护等的控制,此外具有自诊断等诸多功能。制动控制系统主要分为电子制动控制单元BECU和制动控制单元BCU。制动控制装置内部部件布局如图1所示[3]。
如图2所示为HRDA制动系统的主要部件制动控制单元,不仅制动系统的中枢,而且也是与外界各系统联系的纽带,它控制着整套系统的正常有序的工作。制动控制装置由EP电空中继阀(带压力传感器)、电子控制单元(BECU)、试验用接头、过滤器、压力开关等组成。电子制动控制单元BECU为电气部件,具有以下功能:1)检测2个空气簧的压力并通过压力传感器进行空电转换,从而保证无论空车还是超员均可以得到稳定的牵引力和制动力。2)进行电空演算,从而进行常用制动控制,并保证优先使用电制动。3)具有滑行检测和矫正功能。即测定各个车轴的速度,一旦检测出车轮滑行,则通过控制防滑阀来降低制动缸内部压力,从而尽快恢复粘着。提供状态监测和诊断功能。
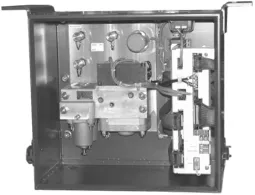
图1 制动控制装置Fig.1 Brake control device
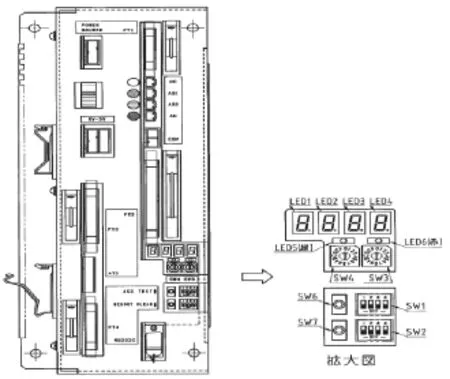
图2 电子制动控制单元Fig.2 Electronic brake control unit
如图3所为制动控制单元的内部气路图,表1为对应名称的简称对照表。制动控制单元BCU包括常用制动和紧急制动所需的所有电空阀和压力传感器。中继阀(RV)中继阀为气动操作阀,可将大量压缩空气由制动风缸提供给制动缸。供风压力等同于中继阀通过变载截断阀从制动/缓解和紧急阀获得的压力信号。如果压力信号保持一定,中继阀将保持恒定的闸缸压力以防泄露,并自动补充发生的任何泄露[1]。空重车调整阀(VLV)空重车调整阀为机械变压限制装置,它可将中继阀信号阀口的供风压力限制在称重紧急制动所需的压力以下。空重车调整阀只影响紧急制动的压力并正比于空气簧压力。此外通过两个连接管路上的节流孔来减小空气弹簧的压力产生波动。当没有空气簧压力信号时(例如空气簧爆裂),空重车调整阀将默认空载紧急制动值为缺省值。常用电磁阀(SBV)电子制动控制单元通过压力传感器来感应空气簧的压力,通过总线接收常用制动指令,从而计算出制动缸的压力,并通过控制常用电磁阀中的供给阀和排气阀得电和失电[4],使实际的制动缸的压力与计算出的制动缸压力相符。紧急制动电磁阀(EBV)紧急制动电磁阀采用得电缓解,失电制动的形式。因此车辆在正常运行期间,紧急制动电磁阀必须得电,无论何种原因导致失电,列车将立即施加紧急制动。在紧急制动施加期间,通过空重车调整阀进行空重车调节。

图3 制动控制单元内部气路图Fig.3 Brake control unit of internal gas diagram

表1 制动控制单元简称对照表Tab.1 Brake control unit as the control table
1.3 其他主要部件
列车防滑系统,车轮滑动保护系统采用基于单轴的滑动检测和矫正功能,即每个轴配备一套速度传感器和防滑阀。停放制动控制装置,停放制动电磁阀在车辆正常运行状态下为失电状态,此时停放制动缓解,并通过停放制动压力开关进行反馈,压力设定为500-700 kpa(该压力可以根据需要调整),即高于700 kpa列车停放制动缓解,低于500 kpa列车制动将随着压缩空气压力的降低而逐渐施加。安装在制动模块上的停放制动隔离塞门由主风进行供风。更换闸瓦时,可操纵此塞门将停放制动装置隔离并排风以实现手动缓解。主风低压开关每辆头车上设有一个压力开关(制动控制单元内),用以监控主风压力。当主风压力降至设定值6 bar以下时,列车紧急回路将断开,列车将立即实施紧急制动。当压力升到7 bar以上,紧急制动才可能进行缓解。司机台仪表;司机台上设置一双针压力表它在驾驶车上显示主风压力和制动缸压力。红针用于显示主风缸的压力,黑针用于显示头车第一根轴的制动缸压力。制动缸隔离塞门HRDA制动系统设置有制动缸隔离塞门(排风塞门),可以分别对转向架制动力进行缓解。车辆正常运行期间,此塞门的手柄应该与管路平行,一旦操作(即手柄垂直于管路),与其相连的转向架的空气制动将丢失,鉴于安全方面的考虑,此塞门的状态信息将要报告给列车管理系统[5]。
2 HRDA制动系统的控制过程与作用原理
HRDA制动系统具有:常用制动、快速制动、紧急制动、停放制动和防滑控制等功能。
2.1 常用制动控制
如图4所示制动控制单元的内部原理图,制动系统收到来自司机控制器(或ATO)或列车监控系统发出的常用制动指令后施加常用制动。常用制动过程中优先采用节能环保的电制动,电制动优先选用再生制动,当再生制动达到能力上限时,系统自动转为电阻制动。当电制动不能满足整列车制动力需求时,空气制动适时补足。通常情况下,空气制动优先使用拖车的空气制动力,拖车制动力达到上限要求时仍满足不了制动力需求时,动车的空气制动进行补充。制动过程中电制动与空气制动协调配合。常用制动具有防滑功能且受到列车冲击极限的限制[6]。
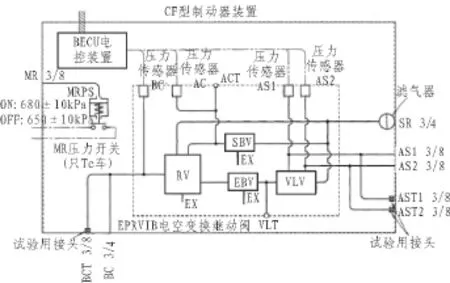
图4 制动控制单元内部原理图Fig.4 Schematic diagram of brake control unit
常用制动的指令以PWM信号方式向BECU 发出指令。当BECU 检测到电制动能力达不到所接收指令需要的制动力时,则发出补足制动力的命令到EP电空转换中继阀,通过空气制动力补足。EP电空转换中继阀由常用控制阀、紧急电磁阀以及双活塞中继阀等构成,它将所接收的电信号转换成气压信号。常用控制阀根据电信号输出一个反馈压力,该压力通过图4中AC压力传感器反馈给BECU 进行大小的调整。调整后的反馈压力进入中继阀增加流量,将其压力输出作为制动力大小进入制动缸,常用制动得以施加。常用制动制动力分配采用电制动优先投入,拖车气制动随后投入原则,以T-M组合的一动一拖的情况为例,M车的电子控制装置通过检测出自身车厢以及拖车的空气弹簧压力,同时计算并分配M车自身以及T车的制动作用力。M车的控制系统除用本车的电制动和气制动外,优先传达电制动指令,在电制动不能满足制动要求时,优先通过拖车的空气制动力补充电制动不足[7]。
2.2 快速制动控制
制动系统收到来自司机控制器(或ATO)或列车监控系统发出的快速制动指令后施加快速制动。快速制动控制方式与常用制动控制方式相同,也是优先使用电制动,电制动不足时由空气制动承担,当电制动故障时,制动力全部由空气制动承担;减速度与紧急制动的减速度相当,但是快速制动是可逆的,快速制动同样具有防滑保护功能及受到列车冲击极限的限制。
2.3 紧急制动控制
列车在运行过程中遇到紧急情况,司机可以通过操作司机台上的紧急制动按钮或主控制器拉至紧急制动位(该制动位的设置与否看客户需求)对列车施加紧急制动,列车一旦施加紧急制动后不能缓解直至列车速度降为零。紧急制动控制系统,采用时常带电的紧急制动环路进行控制。不论任何原因造成紧急电路失电,全列车将自动实施紧急制动。紧急制动减速度通常为1.2 m/s2,且无冲动限制。紧急制动同样具有防滑保护功能。
为了确保列车的运行安全,紧急制动采用了复式紧急制动系统回路。当操纵司控器或紧急制动开关,以及当列车分离或风源压力超低时,BECU 都将接收到紧急制动指令,从而导致紧急电磁阀动作而施加基本的制动力。紧急电磁阀将压力输入至中继阀过程同常用控制阀一样,输入的气体在中继阀被放大,所放大的压缩空气输入到制动缸并转换成相应的制动力施加制动。在拖车的制动控制装置内还设有一个总风压力开关,它的气路连接总风管,电路部分与紧急制动复式环路相接。当总风压力低于一定值时,紧急制动回路立即断开,系统施加紧急制动。
2.4 停放制动控制
由于列车断电停放时,制动缸压力会因管路漏泄无压力空气补充而逐步下降到零,所以停放制动不同于一般的充气—制动,排气—缓解,它是通过弹簧作用力而产生制动作用,能满足列车较长时间断电停放的要求。除在司机台上设有停放制动施加/缓解按钮,可以对列车施加缓解停放制动外,当主风压力降低到某一设定值时,停放制动会自动施加,当主风压力升到某一设定值时,停放制动自动缓解。同时这种单元制动机还具有手动缓解停放制动的功能,通过操作停放制动手动缓解装置,可以手动缓解停放制动[8]。
2.5 保持控制
保持制动功能是在ATO模式下,制动过程中列车自动施加的一个相当于3级常用制动力大小的制动力。保持制动可以防止列车由制动施加状态转为牵引状态时由于牵引力不足引发的列车在坡道上后溜情况。
2.6 防滑控制
由于受气候环境等影响,轮轨间的粘着将会有较大的变化,当粘着低至一定值而不能与制动力距要求相适应时,将出现打滑。HRDA制动防滑系统的工作原理主要是由制动电子控制单元检测出受制动力的车轮趋于抱死时,发出指令,使系统迅速释放部分制动力,恢复轮轨间的粘着,防止车轮擦伤。
3 HRDA制动系统的功能
3.1 可变负载功能
可变负载功能即空重车调整功能。地铁列车的乘客量波动大,乘客量对车辆总重有较大的影响。为了保证列车制动具有一定的减速度,制动系统具备有可变负载功能,即实时地将载荷值传递到BECU,转换成对应的制动力输出。HRDA制动系统通过前后转向架空气弹簧压力信号的平均值来计算车辆重量,这种信号是由EP 电空中继阀里的压力传感器提供。BECU 接收载荷信号后计算出应施加的列车总制动力,然后再根据电制动能力得出应分配到各辆车的空气制动力大小,并以电信号的形式传递到EP电空中继阀。EP电空中继阀输出相应的空气压力,而后进入制动缸。当空气弹簧发生破裂或压力传感器接收的压力信号小于空车信号时,系统默认按空车状态的80%进行计算;若接收的信号过大,将按照满车重量的120%进行计算。当然,根据实际情况可对计算系数作相应调整[9]。
3.2 防滑控制功能
如图5所示为防滑控制的示意图,防滑系统由速度传感器、防滑阀等部件构成。速度传感器安装于转向架轴端,将相应速度的脉冲信号传递到BECU。BECU 通过接收的信号来控制各条车轴的防滑阀,而使它操作制动缸的压缩空气,即实现BC压力的排出、供气和保持。

图5 防滑控制示意图Fig.5 Schematic diagram of anti-skid control
防滑控制主要通过两种方式实现:检测减速度,若速度传感器检测到列车的减速度超过预设值而在车轴产生滑动现象时,BECU 将控制防滑阀使之排气,减小制动作用力;列车排气后随着黏着的恢复而加速,当加速信号超过预设值时,BECU 又发出重新施加制动作用力的指令;检测速度差:系统比较4个速度传感器检测的信号,若任两条车轴的速度差超过预设值,BECU 将发出指令减小相应车轴的制动力。
3.3 其他功能
HRDA制动系统除具有上述基本功能外,为改善列车的运行性能还开发了其它一些功能。为防冲击而确保列车乘坐舒适,系统具有冲动控制功能。系统能够通过接收输入信号检测制动是否缓解,即检测制动不能缓解功能。产生制动不能缓解的状态时,它可通过强迫缓解开关给强迫缓解指令回路供电,从而控制不能缓解车辆的压力控制阀,实现缓解制动。BECU 通过压力传感器能检测出施加制动力的不足,此时,紧急制动辅助继电器动作施加紧急制动,确保列车安全[10]。
4 结 论
HRDA制动系统具有直观的故障显示功能,制动控制单元BECU具有故障记录功能,并能将故障信息发送给列车监控系统,可以提供位数字的故障代码显示,有利于工作人员查找故障。互换性好;HRDA制动系统中除M车的制动控制单元BCU与T车的不能互换外,HRDA制动系统同一型号的部件都可以互换;具有制动力补偿功能,HRDA制动系统单节车故障失去制动力后,其余车会重新分配制动力,确保整列车制动力满足制动要求。但HRDA制动系统也存在单点故障对运营影响较大的缺点,由于采用车控控制方式,单节车的制动控制单元故障会导致整节车制动力丢失,对列车运营造成较大影响,另外HRDA制动系统的集成化不高,整套HRDA 制动系统以散件居多,配管、布线占用很大空间,在模块化设计上还有很大的开发空间;HRDA制动系统的网络控制功能薄弱,由于采用硬线控制,系统的制动精度难以提高。
目前HRDA型电空制动在西安地铁2号线已经有将近2年的运行考验,证明HRDA型电空制动系统在国产地铁制动系统上的应用是非常成功的,系统以控制技术先进、结构简单、操纵及检修也都比较方便等优点得到了用户的肯定,HRDA型电空制动机的控制技术应是在国产地铁客车制动系统上优先选用的国外先进制动控制技术之一。目前已经应用在北京地铁复八线、 HRDA 制动系统可靠性较高,在国内外都有成熟的使用业绩,广泛应用在国内北京、成都、武汉、西安等城市的地铁列车。
[1] 吴萌岭.我国城市轨道车辆制动技术的现状与思考[J].机车电传动,2006(1):1-5.
WU Meng-ling.Brake technology city rail vehicles in China and thinking of [J].locomotive electric transmission,2006(1):1-5.
[2] 西川武志.日本三菱公司制动系统的最新技术和产品[J].国外铁道车辆,2006,43(2):7-16.
Nishikawa Takeshi.New technologies and products [J].foreign railway vehicle braking system of Mitsubishi Co in Japan,43(2):7-16.
[3] 马喜成.地铁车辆用EP2002制动控制系统[J].机车电传动,2007(4):38-42,61.
MA Xi-cheng.EP2002 braking control system for [J].electric locomotives for metro vehicles,2007(4):38-42,61.
[4] 南车青岛四方机车车辆股份有限公司.广州地铁四、五号线技术文件[S].青岛:南车青岛四方机车车辆股份有限公司,2008.
[5] 匡如华.EP2002制动系统及其在城轨车上的应用[J].机车电传动,2009(3):34-36.
KuangRuhua.EP2002 braking system and its application [J].Electric Locomotives in Urban Rail Vehicle,2009(3):34-36.
[6] 周志辉,广州地铁3号线电动车组的制动控制[J].电力机车与城轨车辆,2004(4):14-17.
ZHOU Zhi-hui.the brake control of line3 of Guang zhou Metro EMVs[J].Electric Locomotives and Urban Rail Vehicle,Line 3 of Guangzhou Metro EMUs,2004(4):14-17.
[7] 朱翔.广州地铁3号线列车EP2002制动系统及故障分析[J].机车电传动,2008(3):58-59.
ZHU Xiang.Guangzhou Metro Line 3 EP2002 brake system of train and fault analysis of [J].locomotive electric transmission,2008(3):58-59.
[8] 史富强.KAX-1型车载安全监测诊断系统应用研究[J].电子设计工程,2011(1):112-114.
SHI Fu-qiang.Study on Application of type KAX-1 vehicle safety monitoring and diagnosis system [J].electronic Design Engineering,2011(1):112-114
[9] 农兴中.广州地铁3号线最高行车速度选取分析[J].城市轨道交通,2002(10):32-33.
LONG Xing-zhong.Select the highest line 3 of Guangzhou metro vehicle speed analysis of [J].City Rail Transit,2002(10):32-33.
[10] 陶功安.袁立祥.马喜成.广州地铁3号线地铁车辆[J].机车电传动,2006(4):12-14.
TAO Gong-an.Yuan Li-xiang.Ma Xi-cheng.The vehicles of Guangzhou Metro Line 3 [J].Electric Locomotives,2006(4):12-14.
The HRDA brake system of electric bus Xi'an metro line 2
SHI Fu-qiang
(Xi'an Railway Vocational & Technical Institute,Xi'an 710014,China)
The principle and process principle,functions and main components,control effect of HRDA braking system of Xi'an metro line 2 vehicles using the Japanese NABTSCO company of the analysis,summed up the main characteristics of Xi'an Metro and the application prospect of HRDA brake system using HRDA type braking system of No.2 line.
Xi'an metro line 2;HRDA;control process;characteristics;application prospect
TN05
A
1674-6236(2014)11-0039-04
2013-09-25 稿件编号:201309197
史富强(1971—),男,陕西扶风人,硕士,副教授。研究方向:铁路轨道车辆技术。
