基于dSPACE的高速高精度并联机器人控制系统设计
2014-09-03张宪民
刘 晗,张宪民
(华南理工大学 广东省精密装备与制造技术重点实验室,广东 广州 510641)
基于dSPACE的高速高精度并联机器人控制系统设计
刘 晗,张宪民
(华南理工大学 广东省精密装备与制造技术重点实验室,广东 广州 510641)
并联机器人已被广泛应用于高速运动和高精度定位场合,其控制系统设计也需要根据高速或高精度的应用需要进行针对性设计,以更好发挥机器人的性能。本文基于dSPACE的快速原型技术,设计并构建了平面3-RRR并联机器人的控制系统。针对高速运动、精密定位两种使用目的,设计了三种Simulink控制模型,解决了机器人在位置控制模式与力矩控制模式的驱动问题。试验中一方面完成了机器人的轨迹跟踪,另一方面测量了运动学标定前后定位误差分布,验证了该控制系统应用于高速、高精度控制的可行性。
dSPACE;快速控制原型;平面3-RRR并联机器人;Simulink
并联机器人具有大刚度、高精度、高承载能力、结构紧凑的特点。作为典型并联机器人,平面3-RRR并联机器人继承了以上的诸多优点,不仅可作为高精度定位平台,还可作为高速移动平台。机器人的控制系统也需要根据高速、高精度不同的应用场合进行针对性设计。
在以往平面3-RRR并联机器人的控制系统设计中,张学涛构件了一种以“IPC+PMAC”为控制核心、“RTLinux”为开发平台的控制系统[1]。通过驱动程序、中断服务程序和监视程序实现了机器人平台控制与监视[2]。Lapusan借助dSPACE控制器搭建了机器人的控制系统,并基于Simulink实现了机器人的离线仿真和轨迹跟踪实验[3]。以上两种控制系统均实现了机器人的驱动,但缺乏针对高速、高精度不同应用场合的设计。另一方面,Lapusan的研究展示了dSPACE快速原型用于机器人控制的灵活性与便捷性。dSPACE是基于Simulink的半物理仿真工具。其强大的计算功能可实时运行复杂控制程序,其丰富的驱动器与传感器接口方便了与外围设备的连接,可满足不同应用场合的需要。它实现了与MATLAB/Simulink的无缝连接,借助Simulink建模方法构建控制器模型,减少了在开发硬件驱动程序上的时间与精力,提高了机器人控制系统开发效率[4-5]。
基于上述考虑,本文基于dSPACE板载控制器设计并搭建了平面3-RRR并联机器人控制系统。并根据高速和高精度应用场合的不同,伺服驱动器工作方式的不同,针对性的设计了多种控制模型。
1 控制系统组成
1.1 硬件系统
平面3-RRR并联机器人机构简图如图1。伺服电机通过行星齿轮减速器与驱动关节A1、A2、A3相连。驱动关节通过3条主动臂和从动臂组成的驱动链与动平台C1C2C3连接,使动平台在工作平面内拥有两个平动自由度和一个转动自由度。该机器人的几何参数已经过优化,可实现工作平面内边长200 mm正方形的无奇异工作空间[6]。

图1 3-RRR并联机器人结构简图Fig.1 Structure of planar 3-RRR parallel robot
本文选用安川Σ-V系列伺服电机与驱动器,电机额定功率1.5 kW,额定转矩3.18 N·m,使用20位增量式编码器,可满足高速和高精度控制的需求。伺服驱动器在位置控制模式下,通过设置伺服驱动器中的电子齿轮比参数,可设定伺服电机转动一圈所需要的控制脉冲个数N。当N较大时,一个控制脉冲对应的电机步距角较小,可实现高精度定位;N变小时,步距角变大,相同的控制脉冲频率对应更大的电机角速度,可实现机器人的高速运动。本文选用SHIMPO精密行星齿轮减速器,其减速比为i为1:5,进一步提高了驱动关节的控制精度。
文中选用dSPACE DS 1103单板控制器。控制器通过外接的接口板与外围设备进行连接。本文控制系统中,使用数字I/O接口向伺服电机驱动器发送数字信号脉冲指令,对伺服电机进行位置控制;使用模拟量输出接口(DAC)向伺服驱动器发送模拟量控制信号,对伺服电机进行力矩控制;编码器信号经过伺服驱动器的分频,通过dSPACE的增量编码器接口反馈到dSPACE单板系统,作为伺服电机电机转角的反馈信号。
1.2 软件系统
如图2,软件系统功能包括控制模型设计、控制代码生成和实验过程中硬件和PC交互3个部分。通过软件系统可以完成控制程序的设计、编译以及下载[5]。

图2 并联机器人控制系统结构Fig.2 Parallel robot control system structure
3-RRR并联机器人控制程序设计首先从基于MATLAB/Simulink的控制模型设计开始。由于使用Simulink的图形化建模方式,不必逐行书写控制代码,可以快速建立控制程序。丰富的Simulink框图模块资源可以实现复杂的数学运算和丰富数据处理功能。使用dSPACE提供的RTI(Real-Time interface)模块,可将dSPACE硬件资源以Simulink模块的形式表示,在对RTI模块参数进行配置的同时便完成了对应硬件端口的初始化配置。
借助Simulink中的RTW(Real-Time Workshop)可以将Simulink控制模型转换为硬件中直接运行的C代码。通过RTW生成的控制代码经过编译后会直接下载入dSPACE控制器内并自动运行,之后dSPACE单板系统便可成为脱离PC主机的实时控制器,可作为3-RRR并联机器人控制器单独使用。
ControlDesk是dSPACE的实验工具软件。它可以实现控制程序的下载、启动和中断操作。通过拖放方式建立的虚拟仪表界面,可实时显示控制的结果,并在线完成控制模型中参数的修改,以获得更好的控制效果。
2 控制模型设计
本文中3-RRR并联机器人可应用于高速运动和高精度定位两种工作场合。在高速轨迹跟踪时,伺服驱动器既可以工作在位置控制模式,使用脉冲信号进行控制;也可以工作在力矩控制模式下,由模拟量力矩信号进行控制。因此Simulink控制原型也需要根据工作场合与伺服驱动器工作方式的不同进行设计。
2.1 位置模式的高速轨迹跟踪
伺服驱动器在位置控制模式下,伺服电机的驱动依赖于外部输入的脉冲控制信号。因此位置控制模式下的主要问题是如何将伺服电机转角的期望轨迹变为位置控制脉冲信号。伺服驱动器通过接收两路数字信号控制伺服电机。一路是脉冲信号,一个脉冲信号代表一个固定步距角,而这个角度的方向由此时代表方向的一路I/O的状态决定,不同的旋转方向由高低电平决定。
Simulink模型主要功能是将连续的轨迹信号变为离散的控制脉冲。图3为位置控制下轨迹跟踪的Simulink控制模型。每部伺服电机的转角轨迹,通过运动学逆解离线完成。生成驱动电机的转角轨迹后,通过Simulink中的Repeating Sequence Interpolated模块生成伺服电机期望的轨迹。通过建立的Pulse Generator子系统将连续的轨迹变为脉冲和方向信号发送到dSPACE I/O口模块。在模型中加入RTI库中的DS1103ENC_ POS模块,可采集伺服驱动器反馈的伺服电机转角信号,再通过离线的运动学正解便可还原动平台工作空间运动轨迹。
Pulse Generator子系统如图4所示,期望轨迹通过Trajectory in端口输入,经过Quantizer模块,变为离散的台阶形信号,每个台阶的高度代表了电机的步距角,两个步距角之间的时间由角速度决定。将此信号进行微分便得到了期望的脉冲信号,之后再经过取绝对值、限制数值范围和布尔数字类型的转换,脉冲信号便可以通过Pulse_I/O_port端口输出给外部链接的I/O口模块。为了获得电机转向控制信号,期望轨迹则首先通过微分获得速度轨迹,再通过符号运算模块获得速度方向,最后调整数值范围便可生成电机转型控制信号,并通过Direction_I/O_port端口输出给外部链接的I/O口模块。

图3 位置控制下连续轨迹跟踪框图Fig.3 Simulink model for tracking control
在Simulink模型的Sample Time设为20 μs,伺服驱动器设置为500个脉冲伺服电机转动一圈时,在保证脉冲信号发生正常的情况下,脉冲信号最大频率为25 kHz,对应驱动关节最大瞬时角速度为62.83 rad/s,在原点零度位姿下沿x方向最大平动速度为16.1 m/s,沿y方向最大平动速度为14.8 m/s,满足高速运动的要求。
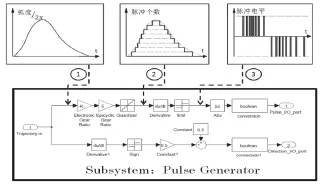
图4 “Pulse Generator”子系统工作原理Fig.4 The schematic diagram of ‘Pulse Generator'
2.2 位置模式的高精度定位
在高精度定位时,控制模型需要对3-RRR并联机器人进行点对点运动控制。因此,当平台在期望的位置和姿态改变时,控制程序需要实时在线完成轨迹的规划。本文使用Simulink传递函数模块实现在线的轨迹规划。
如图5在Simulink控制模型中,机器人目标位姿由3个常数模块表示:Point_X、Point_Y、Ponit_T代表了动平台在工作空间内的期望位姿:X、Y、θ。经过传递方程模块和运动学逆解模块便可生成伺服电机的期望轨迹。3个位姿的常数模块的数值可以在ControlDesk界面中改写。当模块数值改变时,便生实时可成了一种先快后慢的运动轨迹,此变化规律很好的适应了高精度定位的需要。
在控制模型sample time为20 μs的情况下,伺服驱动器调整被到200 000个脉冲转动一圈,此时一个脉冲对应的步距角为6.3 μrad,对应的机器人终端动平台在x和x方向的分辨率为1.5 μm左右,满足高精度定位的需求。但此时x和x方向的最大速度仅为40.3 mm/s和36.9 mm/s。
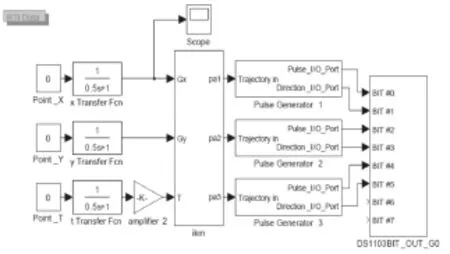
图5 点对点定位控制框图Fig.5 Simulink model for positioning control
2.3 力矩模式的高速轨迹跟踪
在位置控制模式下,机器人闭环控制的过程由伺服驱动器完成,dSPACE仅相当于是伺服驱动器的上位机,发送控制指令。伺服驱动器的力矩控制模式也可实现高速运动控制。此时,dSPACE通过DA接口向伺服驱动器输出模拟量力矩信号,伺服驱动器将信号转变为伺服电机的控制力矩,并向dSPACE反馈分频后的电机编码器信号,组成控制闭环。
驱动角空间PD控制的Simulink模型如图6所示。伺服驱动器接收dSPACE控制器输出的电压信号直接对伺服电机电流环进行控制生成电机的输出力矩,此力矩的大小与dSPACE控制信号的电压值成正比。图中使用的期望轨迹产生方式与位置控制模式相同,期望的轨迹信号经过微分后便可以得到期望的角空间速度轨迹。三部反馈回的伺服电机角度位置信号和角速度信号通过RTI库中的DS1103ENC_POS模块读取,与期望的角度、角速度一同经过PD控制器便可生成力矩控制信号,并通过DS1103DAC模块输出。Saturation 模块限制了输出力矩,防止因为输出力矩过大引起失控。
3 实 验
3.1 高速轨迹跟踪
伺服驱动器位置控制模式下的轨迹跟踪结果如图7。实线为期望轨迹,虚线为实际跟踪结果。期望轨迹为以原点为圆心,半径70 mm的圆形,运行一圈时间为0.5 s。由图可知机器人在工作空间内上取得了光滑的轨迹跟踪结果。实际跟踪轨迹略小于期望轨迹是由伺服驱动器控制延迟导致。
力矩控制模式下的实验与位置控制模式使用了相同的期望轨迹,其跟踪结果如图7中点画线。与位置控制模式相比,工作空间的轨迹跟踪出现了明显的偏移与波动,并且急停时出现了明显的残余振动现象。
以上实验验证了本控制系统用于高速运动控制的可行性。
3.2 精密定位
基于图5中模型进行控制,首先使用Leica AT901-B激光跟踪仪测量了并联机器人在工作空间内的x与y方向定位误差分布,如图8(a)、8(b)。虽然并联机器人可以实现微米级的分辨能力,但是由于机器人构件加工和装配过程中的几何误差的存在,定位误差依然明显,该误差可以通过运动学标定进行识别与补偿。如图8(c)和8(d)所示,运动学标定与补偿后x和y方向的定位误差均保持在±30 μm以内,验证了本控制系统用于精密定位的可行性。

图6 力矩控制模式下轨迹跟踪框图Fig.6 Contorl model for torque control mode

图7 力矩控制模式的原型轨迹跟踪结果Fig.7 Torque control mode tracking result
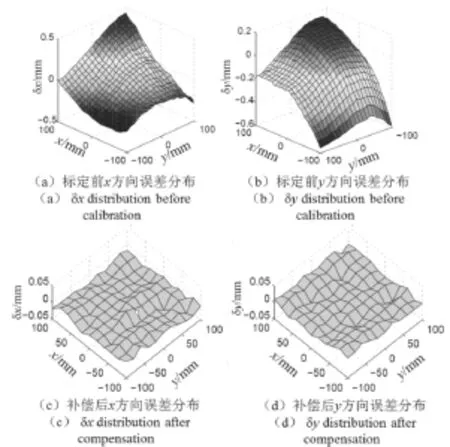
图8 并联机器人在运动学标定前后的误差分布Fig.8 Error distribution before and after kinematic calibration.
4 结束语
文中展示了基于dSPACE的平面3-RRR并联机器人的控制系统设计,并针对伺服驱动器的位置和力矩控制模式,设计了Simulink控制模型。通过高速轨迹跟踪实验和运动学标定实验,分别验证了本控制系统用于高速和高精度定位的可行性。综上所述,基于dSPACE的控制系统在使用中简单方便灵活,满足了并联机器人高速与高精度控制的需求,具有应用价值。
[1] 张学涛,杨建新,余跃庆.高速柔性平面3-RRR并联机器人实验系统开发[J].机械设计与研究,2008,24(5):39-41.
ZHANG Xue-tao,YANG Jian-xin,YU Yue-qing.Experiment system for the high-speed flexible planar 3-RRR parallel robot[J].Machine Design and Research,2008,24(5):39-41.
[2] YU Yue-qing,Du Zhao-cai,YANG Jian-xin,LI Yuan.An experimental study on the dynamics of a 3-RRR flexible parallel robot[J].IEEE Transaction on Robotics,2011,27(5):992-997.
[3] Lapusan C,Maties V,Balan R.et al.Rapid control prototyping using Matlab and dSpace on application for a planar parallel robot [C]//2008 IEEE International Conference on Quality and Testing,Robotics,AQTR 2008:361-364.
[4] 沈悦明,陈启军.dSPACE快速控制原型在机器人控制中的应用[J].机器人,2002(6):545-549.
SHEN Yue-ming,CHEN Qi-jun.dSPACE rapid control prototyping and It's application in robot control[J].Robot,2002(6):545-549.
[5] 潘峰,薛定宇,徐心和.基于dSPACE半实物仿真技术的伺服控制研究与应用[J].系统仿真学报,2004,16(5):936-939.
PAN Feng,XUE Ding-yu,XU Xin-he.The research and application of DSPACE-based hardware-in-loop simulation technique in servo control[J].Journal of System Simulation,2004,16(5):936-939.
[6] GAO Mingwang,ZHANG Xianmin,WU Zhi-wei.Optimum design of a 3-RRR planar parallel manipulator with a singularity-free workspace[J].Applied Mechanics and Materials,2011(86):606-610.
Control system design for a high speed and accuracy planar 3-RRR parallel robot basing on dSPACE
LIU Han,ZHANG Xian-min
(Guangdong Province Key Laboratory of Precision Equipment and Manufacturing Technology,South China University of Technology,Guangzhou 510641,China)
Parallel robots have been widely used as high speed platform and high accuracy positioning platform.The control system should also be designed basing on the needs of high speed or accuracy.Basing on dSPACE rapid prototyping technology,this paper put forward three Simulink models for high speed control and high accuracy control,and makes a demonstration of the whole process of control experiment.On one hand,we demonstrate how to realize high speed trajectory tracking;on the other hand we measured the positioning error before and after kinematic calibration.The experiments prove that this control system is suitable for both high speed and accuracy motion control.
dSPACE;rapid control prototyping;3-RRR parallel robot;simulink
TN05
A
1674-6236(2014)11-0019-04
2014-03-28 稿件编号:201403311
国家自然科学基金重大研究计划项目(91223201);广东省自然科学基金团队(S2013030013355);中央高校基本科研业务费项目(2012ZP0004);广东省高等学校珠江学者岗位计划(2010)
刘 晗(1989—),男,黑龙江绥化人,硕士。研究方向:并联机器人控制。
