超短基线定位系统在侧扫声呐水下定位中的应用
2014-09-02陈航伟
陈航伟
(中国南方电网超高压输电公司广州局,海南 海口 570105)
超短基线定位系统在侧扫声呐水下定位中的应用
陈航伟
(中国南方电网超高压输电公司广州局,海南 海口 570105)
根据侧扫声呐应用于海底电缆路由检测过程中,需要对拖鱼进行精确水下定位的实际需要,介绍了超短基线定位系统的原理,并根据实际应用经验,分析了影响系统定位的2类误差主要来源。
超短基线;侧扫声呐;水下定位
0 引言
南方电网主网与海南电网联网系统(以下简为“联网系统”)于2009年6月30日建成投产,联网系统在琼州海峡敷设了3根单相海底电缆,作为南方电网主网与海南电网的联络线。受狭管效应影响,琼州海峡常年海流较大,而海底电缆部分海域海床为泥沙底质,易因海水冲刷而使海底地形地貌产生巨大变化。同时琼州海峡是国内最繁忙的航道之一,船舶抛锚现象较为频繁。为及时了解海底地形地貌的变化情况,确保海底电缆安全,需定期使用侧扫声呐系统对海底电缆路由海域开展地形地貌测量。为获取精度较高的测量数据,需精确定位侧扫声呐的拖鱼在水下的位置。目前国内常见的定位方法是利用水声传感器对拖鱼进行位置测量,并辅助其他姿态传感器,可以得到较高精度的拖鱼位置信息。
1 超短基线系统定位原理
超短基线定位系统主要由发射基阵、应答器、接收基阵和数据处理单元组成(其结构框图如图1所示),实际生产中一般将发射基阵、接收基阵制作到同一探头内形成收发基阵。将至少3个收发基阵安装到船体不同位置,应答器安装到拖鱼本体。系统通过测定各接收基阵接收到的信号相位差来确定接收基阵到拖鱼的相对方位角;通过测定声波到接收基阵的时间,再利用声速剖面修正波速线,最终确定接收基阵到拖鱼的相对距离,从而确定拖鱼的相对位置。
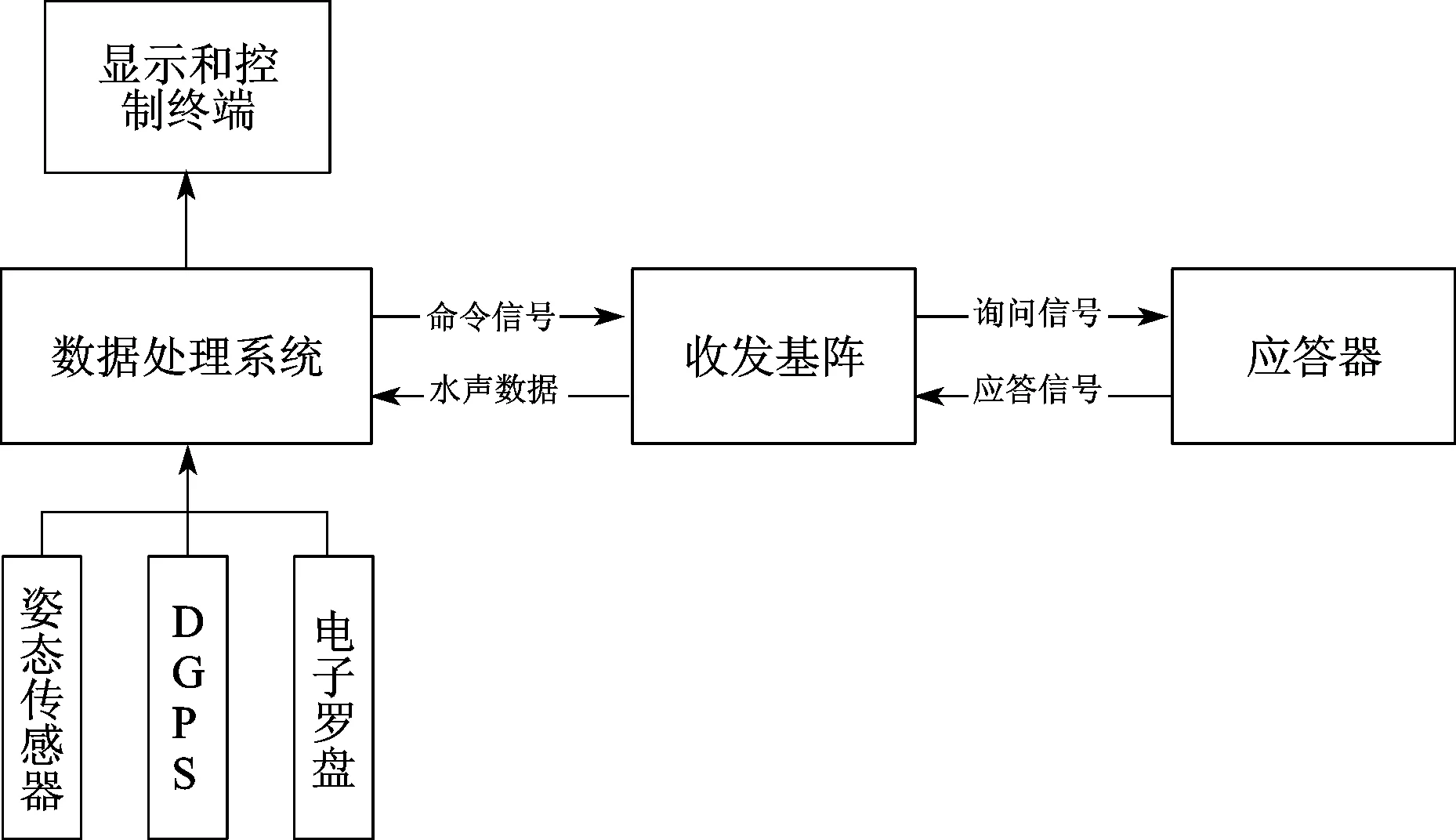
图1 超短基线系统结构框图
应用由3个收发基阵组成的最简单的超短基线系统,原理如图2所示。
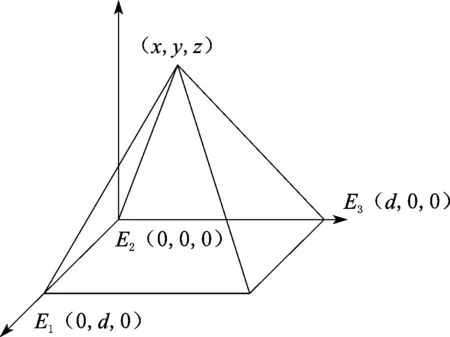
图2 超短基线系统原理图
采用直角三角形基阵,直角边的阵元间距为d,X轴指向船首方向,3个基阵的坐标如图2所示,分别为(0,d,0)、(0,0,0)、(d,0,0),拖鱼上的应答器坐标为(x,y,z),以位于坐标原点的基阵为基准点,可以计算得到和其他2个基阵的相位差计算公式:
(1)
(2)
其中,坐标原点与拖鱼上的目标斜距r为:
(3)
因此,将公式(3)带入公式(1)、(2),可得公式(4)、(5):
(4)
(5)
由于在实际生产中斜距r远大于阵元间距d,因此可推导出公式(8)、(9):
(6)
(7)
(8)
(9)
式中,λ为接收到的声波波长;v为接收到的声波在水中的传播速度;Δt为拖鱼上的应答器发出声波后,声波被船舶上的接收基阵接收到的时间间隔。
公式中,相位差φ12、φ23可以使用仪器测量得到,声波的波速v、时间间隔Δt也可以测量得到,因此可以计算得到斜距r,而声波波长λ为已知量,将上述数据代入公式(8)、(9)、(3),最终可计算得到拖鱼的坐标值(x,y,z)。
2 超短基线定位系统应用中的误差分析
根据图1可以了解到超短基线的数据来源主要有DGPS、船载姿态传感器、收发基阵等,因此在实际应用中,DGPS/船载姿态传感器的稳定性和可靠性、水下作业环境、海况都是超短基线定位系统的主要误差来源。为尽可能减少误差,提升系统定位精度,需首先明确超短基线定位系统的误差来源,进而才能尽可能降低显著误差,取得良好的测量结果。通过分析总结,超短基线的误差主要来源于以下2类:
(1) 校准误差。超短基线定位系统的坐标由DGPS系统提供,同时船舶姿态传感器提供船舶实时摆动参数。上述系统在实际使用过程中存在的误差将直接影响超短基线定位系统的精度。同时在实际操作过程中,受航速、潮流影响,拖鱼上应答器与收发基阵之间的位置关系在不断变化,导致收发基阵之间的相位差也在不断变化,也会影响系统的定位精度。
(2) 环境误差。声波在水下传播过程中,受海洋环境影响,将会产生反射、散射、折射、扩散等物理现象,上述情况都将影响测时准确度。同时声波在不同温度、盐度、深度海水中的传播速度不同,因此需根据实际情况,建立声波传播通道的详细模型,计算声线传播的详细轨迹,得出收发基阵和应答器之间几何斜线和相位差之间的准确关系。
3 结语
随着联网系统二回建设、海南核电逐步投产,对海底电缆的运行和维护要求将越来越高。对于侧扫声呐拖鱼的水下精确定位将是海底电缆运维工作的一项重要研究课题,本文对于超短基线定位系统应用于侧扫声呐拖鱼的水下精确定位进行了初步的探讨,但是由于水下定位工作的复杂性,如何有效提高超短基线定位系统对拖鱼的水下定位精度,还需开展深入研究。
[1] 庄杰枣,王绍智,郑铁民,等.侧扫声呐探测的若干问题[J].海洋测绘,1996(4)
[2] 罗声荣.侧扫声呐和多波束测深系统在海洋调查中的综合应用[J].海洋测绘,2003(1)
[3] 邢志伟,于开洋,王晓辉.超短基线定位系统在ROV动力定位中应用的可行性研究[J].机器人,2002(6)
[4] 黄俊峰,邢志伟,李一平.基于超短基线的缆控水下机器人动力定位[J].控制工程,2002(6)
[5] 张粤宁,刘鹏.高精度超短基线定位系统在水下定位中的应用[OL].http://wenku.baidu.com/view/8a22594e852458fb770b 56f2.html
2014-09-01
陈航伟(1986—),男,浙江龙游人,助理工程师,主要从事海底电缆运维工作。