Pro/E在倾翻机构设计中的应用
2014-09-01马全建
马全建
(贵州航天乌江机电设备有限责任公司,贵州 遵义 563000)
Pro/E在倾翻机构设计中的应用
马全建
(贵州航天乌江机电设备有限责任公司,贵州 遵义 563000)
在倾翻机构设计中充分利用Pro/E软件的强大功能,针对设计中的关键点,利用Pro/E机构分析模块,方便地找出驱动复杂机构所需转矩,取代了复杂的力学计算,并进行运动学仿真分析,验证了静止点位置的正确性;通过行为建模功能对负载(铁水包外形)进行了优化设计;最后通过Mechanica模块对主要受力件进行有限元分析,大幅提高了设计的质量和效率。
Pro/E;倾翻机构;运动学仿真;行为建模;有限元分析
0 引言
随着计算机技术的发展,利用现代CAD/CAE工具对机械产品进行研究已经成为一种趋势。采用三维软件建立设计模型,综合运用软件内的各个功能模块,对设计目标进行特定的分析,如机构的运动学仿真分析、静态分析、动态分析及有限元技术分析等,而Pro/E软件正是这种现代工具的代表。采用三维软件,无需生产样机,可直接对设计模型进行分析验证,不仅节约了大量的成本和时间,还能提高设计的质量和效率。
1 倾翻机构组成及原理
倾翻机构是一种浇铸系统的核心部分,主要由组合平行四连杆机构、机架、铁水包及减速机等组成(图1),铁水包固定在组合平行四连杆机构上端支臂上,包内盛有供浇铸的铁水,减速机带动组合平行四连杆机构旋转,铁水包也随之倾翻,平缓地将包内的铁水倒入一种炭块碳碗孔内,从开始倾倒到包内的铁水完全倒完的整个倾翻过程中,铁水包浇铸口(O点)相对于碳碗孔始终处于静止状态(炭块碳碗孔会定时送到浇铸口下的固定位置)。基于平行四连杆机构的固有特性,要求浇铸口(O点)必须在FG杆的连线上,且与BD杆等长,这样浇铸时铁水包相当于绕O点作旋转运动,自然浇铸口O与A、B点一样始终静止不动,其机构简图如图2所示。
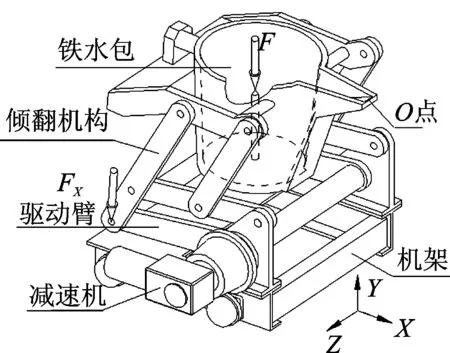
图1 倾翻机构结构示意图

图2 倾翻机构原理及受力简图
2 倾翻机构建模及机构分析
根据图2所示的机构原理,以Pro/E三维设计软件为平台,采用顶层骨架法为核心的自顶向下方法建立倾翻机构的三维模型(图1)。装配时各连杆采用销钉连接,保留自由度,之后对模型进行全局干涉检查。下面我们运用Pro/E软件对机构设计的关键点进行分析及优化。
2.1 减速机倾翻力矩(找出最大倾翻力矩)
该机构由减速机产生驱动力矩带动BD杆(摇杆)旋转,其中铁水包与FG杆成为一体,主要承受铁水包及包内铁水重量。驱动整个机构旋转主要需克服铁水重量(G1)、铁水包重量(G2)及机架自重(G3)所产生的力矩。为保持机构平衡,设此时减速机加在摇杆BD上的力矩为M。
首先针对机构本身来说,在运动过程中各连杆重心始终在变化,另外,铁水的重量在不断减少,重心始终在变化,确定整个机构的重心位置,建立力学分析模型较为复杂。
为解决这个问题并准确计算出力矩M,运用三维软件Pro/E进行仿真分析,可快速得出所需数据。在机构的装配模型中,在外部载荷项启用重力选项(针对机构自身及铁水包重量);因铁水处在近似圆柱形的铁水包内,在旋转的初始时间内(取350 s范围内),可以假设为重心不变且绕O点旋转,这样,我们在初始位置铁水重心处添加作用力(图1)模拟铁水重力,作用力方程:
F=(m-m1·t/t1)gt∈(0~350)
式中,m为铁水包中铁水总重量(kg);m1为浇铸一个碳碗孔所需铁水重量(kg);t1为平均浇铸一个碳碗孔用时(s)。
选定连接点D处的径向力FX(垂直于摇杆BD,单边)为测量点,得出分析的测量结果(图3)。该曲线图中径向力FX与力臂长(BD杆长度LBD)的乘积即减速机输出力矩M,从而可以绘出相应的力矩曲线图。
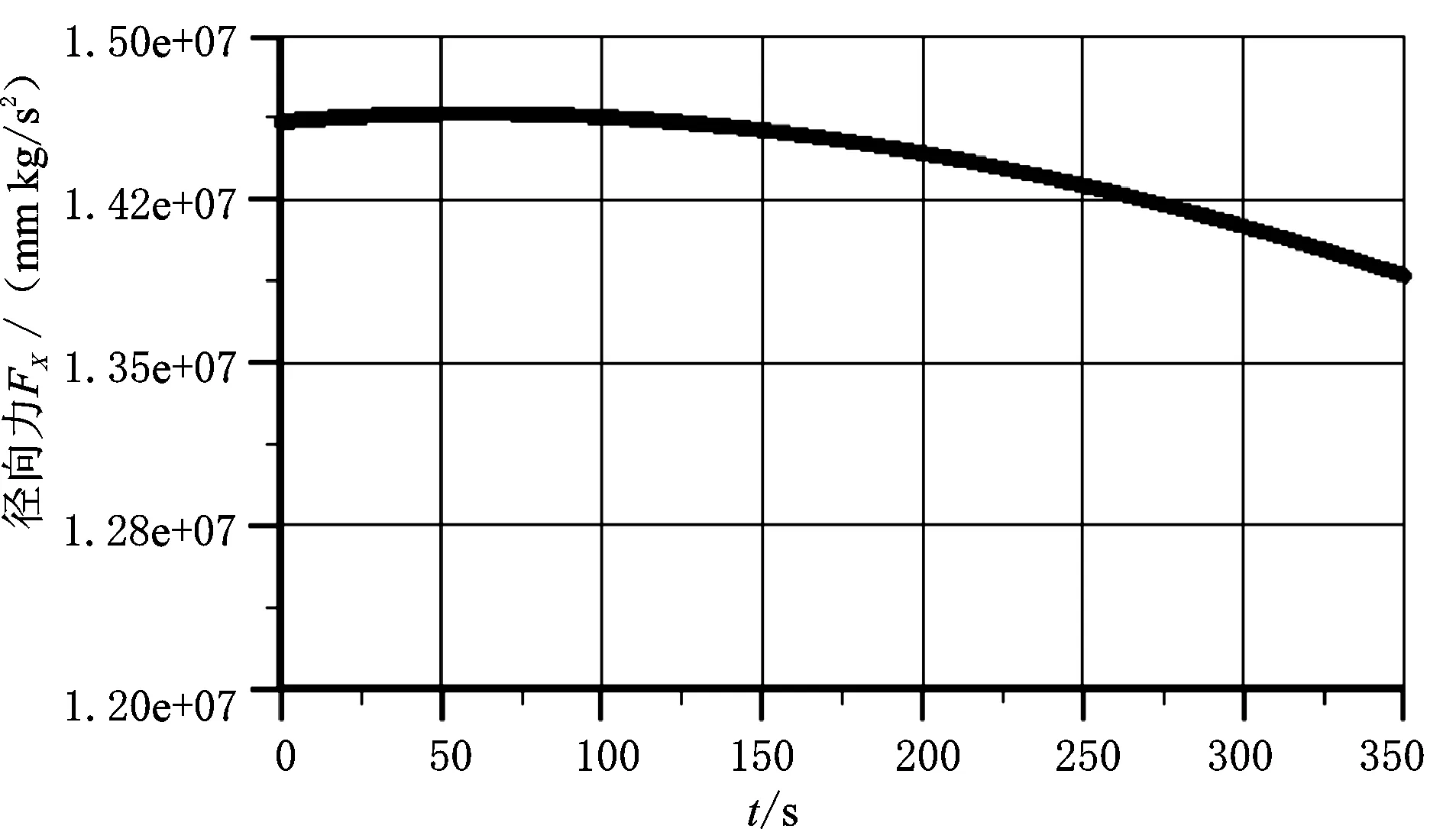
图3 倾翻机构BD杆D点的径向力曲线图
M=2FX×LBD
2.2 运动学仿真验证
在机构分析的同时,用运动学分析及仿真对前面的浇铸口静止点进行验证,以证明设计的可行性(获取浇铸口O点的运动轨迹)。
对机构进行运动学分析,选取O点作为测量对象,得出O点的位移曲线图(图4),从输出图表可以看出,O点完全是一个静止点,相对于原点的位置始终不变,由此进一步印证了设计的正确性。
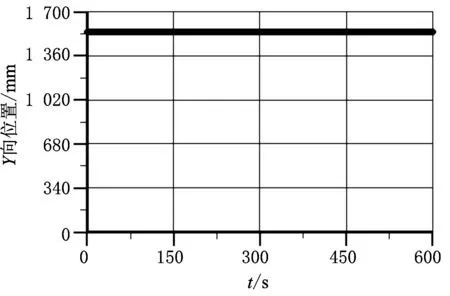
图4 浇铸口(O点)Y向位置曲线图
2.3 铁水包优化设计
铁水包内盛有固定重量的铁水,包与铁水之间隔有耐火材料。设计要求铁水包盛放铁水时使自重最轻及表面积最小,减少热量散失。为解决这个问题,我们运用Pro/E的行为建模功能对其进行优化设计。
行为建模是参数化设计中的一种分析工具,主要是通过对模型中的参数进行分析和选取,从中找出合适的参数,通过改变这些参数来改变模型的外形尺寸以满足设计要求。
用行为建模解决问题的方法:在满足铁水重量为定值时,找到合适的铁水包外形尺寸一组值,使其表面积S最小,从而使包裹铁水的耐火材料及铁水包自重最小,自然散热面积最小。
行为建模首先创建锥形分析特征(图5),建立模型目标参数(φ=630 mm、H=710 mm、θ=4°),并创建质量分析特征;其次对参数进行敏感度分析;最后进行可行性/优化分析,以分析并优化各个参数,使模型最大程度地符合设计要求。

图5 行为建模分析模型
铁水包的设计目标是质量为定值(1 200 kg)的前提下表面积最小,对设计变量(目标参数)设定变化范围为原值的±50%,最后求解,优化后模型最小面积如图6所示,同时模型的3个变量尺寸被自动更改为所求的优化尺寸,优化前后结果对比如表1所示。

图6 优化目标收敛图

表1 优化前后结果对比
利用行为建模技术的自动求解,能在最短的时间内找到满足工程设计所需的最佳参数,大大提高了效率。
2.4 关键件的有限元分析
Pro/E中Mechanica模块是集运动、结构、热力学于一体的大型分析模块,能进行静态、动态、疲劳等多种分析。我们根据模块中结构分析步骤和要求对倾翻机构的主要受力件(变截面驱动臂)进行有限元分析,确保其强度和刚度满足使用要求,用于指导该机构的优化设计,有限元应变和应力分析结果如图7、图8所示。

图7 驱动臂最大主应变图

图8 驱动臂最大主应力图
3 结语
本文以一种倾翻机构的设计为例,运用三维软件Pro/E各个模块,通过运动学仿真分析、行为建模及有限元分析等,为倾翻机构的设计提供了精确的设计依据,有助于提高产品设计的可行性和可靠性,并为新产品的研发提供新的思路。
[1]许家忠.Pro/E在机构运动分析中的应用[J].轻工科技,2012(4)
[2]郭洋.Pro/ENGINEER企业实施与应用[M].清华大学出版社,2008
[3]陈良宇,巩云鹏.机械设计手册[M].第5版.机械工业出版社,2010
2014-06-11
马全建(1980—),男,河南开封人,助理工程师,研究方向:机械设计制造。