高速公路路面不平度识别研究
2014-08-27张丽霞章红梅潘福全
张丽霞 章红梅 潘福全
(1. 青岛理工大学汽车与交通学院,青岛 266520; 2. 同济大学结构工程与防灾研究所,上海 200092)
1 引 言
由于路面的不平度,当车辆在高速公路上行驶时会使车辆的振动加剧。车辆对路面或桥面的作用力不再是常量,成为随机动载。如果随机动载作用于桥梁结构,可能会对桥梁产生较大的动力响应,从而会缩短其使用寿命[1]。作用于路面的随机动载的增加会加剧路面的破坏。因此,高速公路路面不平度的研究对于分析道路的应力分布状况及路面结构的动力响应有一定的参考价值。
文献[2]利用功率谱密度函数得到路面不平度,同时考虑路面不平度、汽车动力学性能以及汽车车速来计算增加的动载对桥面的破坏影响。文献[3]将分形插值理论应用于路面不平度的研究,建立了实际道路路面不平度的分形插值模型,并分析了其影响因素及影响规律,通过分形参数与传统参数确定了模型的精度。该研究结果表明不同路面的模拟参数和传统参数与实际路面能保持较好的一致性。文献[4]采用Fourier逆变换法生成了各级桥面不平度序列,应用Newmark法分析了某简支梁在考虑桥面不平度下的动力响应。文献[5]以北京地区真实路面测量数据为例,生成了典型道路谱,得到了能够表征某类路面的典型谱。文献[6]结合实际车辆运行中左右车轮的相干性,给出了右车轮路面不平度激励的数值拟合方法。利用Matlab软件建立了左右车轮的路面不平度激励模型,并进行了仿真验证。
路面不平度的获取方法有直接测量法、仿真模拟法和载荷谱迭代法。直接测量法测量速度慢,设备价格昂贵;仿真模拟法误差较大,只能对国标规定的路面进行仿真模拟;载荷谱迭代法误差源多,数据精度受迭代误差影响较大,周期长,迭代原理较复杂[7]。本文利用仿真分析方法,建立径向基函数(RBF)神经网络理想输入样本和输出样本后,对B级和C级路面不平度进行了识别。
2 径向基函数(RBF)神经网络输入样本的确定
为了得到径向基函数神经网络的输入样本,需要建立汽车振动模型得到车身质心垂直加速度和俯仰角加速度。在建立振动模型时,考虑车身的垂直运动、侧倾运动及俯仰运动,4个车轮质量有4个垂直自由度,共7个自由度,如图1所示。
由拉格朗日方程,可得到车辆的振动方程如式(1)所示
(1)

图1 7个自由度汽车振动模型Fig.1 Seven-degree-of-freedom vehicle vibration model
式中Z——车辆各自由度的位移向量;
M——车辆的质量矩阵;
K——车辆的刚度矩阵;
C——车辆的阻尼矩阵;
Kt——轮胎刚度矩阵;
Ct——轮胎阻尼矩阵;
Q——路面输入向量;

将式(1)两边乘以M-1,得
(2)

(3)
3 径向基函数(RBF)神经网络输出样本的确定
以前轮为参考点,设左、右车轮路面白噪声输入Wx与Wy之间的传递函数为[8]
(4)
取二阶近似,得到
(5)
引入中间变量M(s),式(5)变成
(6)
分别由分子、分母可得
(7)
Wy(s)=a2M(s)+a0s-2M(s)+a1s-1M(s)
(8)
设状态变量x1=L-1(s-1M(s)),

(9)
对式(8)进行Laplace逆变换,可得
(10)
(11)
当前左车轮白噪声输入Wx已知时,根据式(9)得到x1,x2,然后根据式(11)得到前右车轮白噪声输入Wy。根据文献[9]可得前后车轮路面输入函数,这样就能得到四个车轮受到的路面不平度输入函数。
利用Matlab软件编程可得四轮汽车在B级和C级路面受到的不平度激励,分别如图2—图5所示。从图中可以看出,C级路面不平度比B级路面不平度大,前后轮路面不平度存在时间上的延迟。
4 高速公路路面不平度识别的实例分析
某一微型轿车的基本数据为:m=920 kg,Iy=948 kg·m2,Ix=239 kg·m2,a=1.109 m,m1=m2=m3=m4=25 kg,L=1.22 m,u=80 km/h,c6=c8=3 340 N·s/m,k2=k4=16.7 kN/m,k6=k8=21.1 kN/m,b=1.09 m,c2=c4=2 845 N·s/m,k1=k3=k5=k7=147 kN/m,c1=c3=c5=c7=40 N·s/m。

图2 B级路面左前后轮路面不平度Fig.2 Road surface roughness above left front and rear wheels on level B road surface
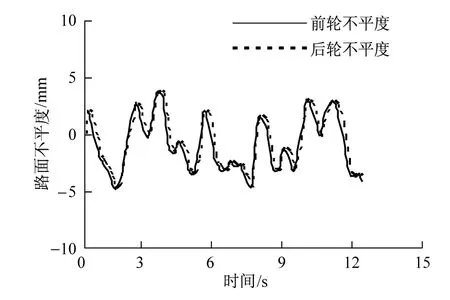
图3 B级路面右前后轮路面不平度Fig.3 Road surface roughness above right front and rear wheels on level B road surface
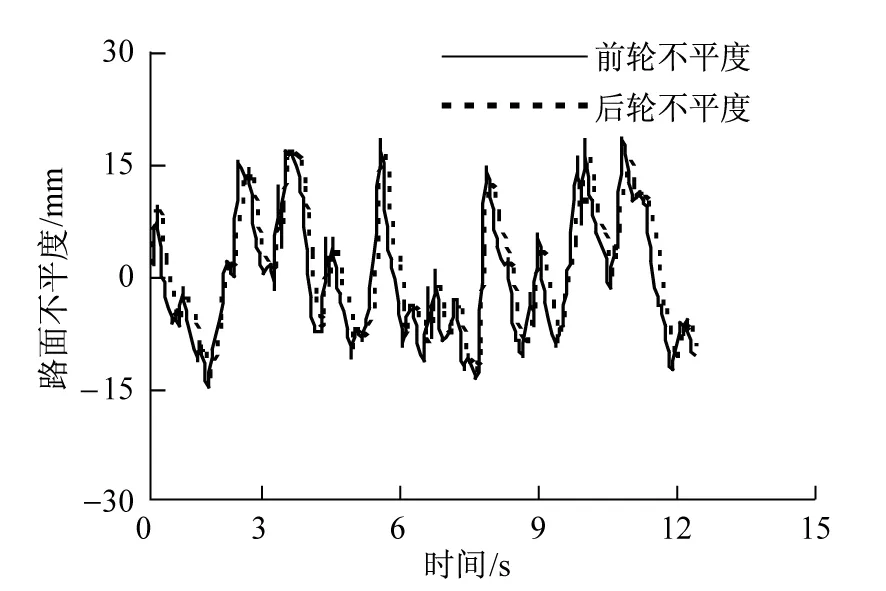
图4 C级路面左前后轮路面不平度Fig.4 Road surface roughness above left front and rear wheels on level C road surface
训练RBF网络时,以计算得到的车身质心俯仰角加速度和垂直加速度作为网络理想输入样本,对应的路面不平度作为网络理想输出样本[10]。
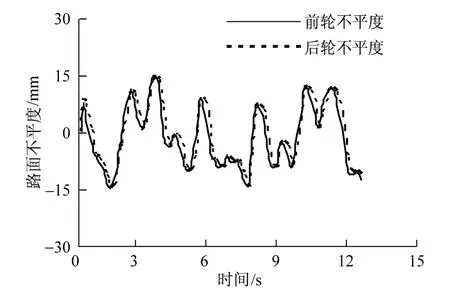
图5 C级路面右前后轮路面不平度Fig.5 Road surface roughness above right front and rear wheels on level C road surface
4.1 B级路面不平度识别分析
根据以上轿车数据和式(1),仿真计算得到B级路面上的车身质心俯仰角加速度和垂直加速度,分别如图6和如图7所示。代入以上训练好的神经网络来识别B级路面不平度。

图6 车身质心俯仰角加速度(B级路面)Fig.6 Body centroid pitching angular acceleration(level B road surface)
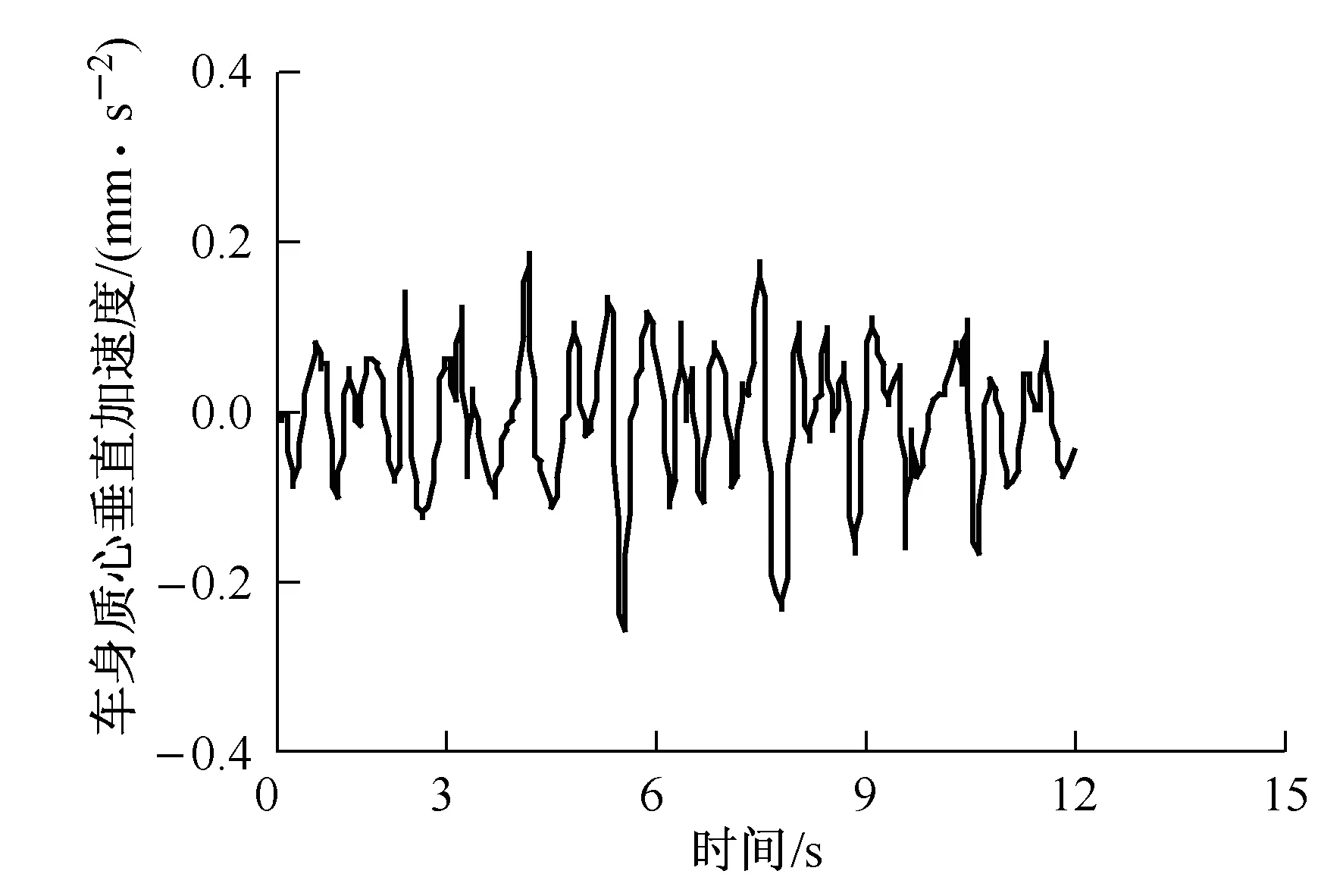
图7 车身质心垂直加速度(B级路面)Fig.7 Body centroid vertical acceleration (level B road surface)
图8(a)是在B级路面上左前轮路面不平度RBF神经网络识别值和滤波白噪声拟合值。从图中可以看出,拟合值和识别值有很好的吻合度。图8(b)是识别值和拟合值的相对误差。相对误差的最大值是0.24%。可见,相对误差很小。
将图6和图7数据加入均匀分布随机噪声,然后代入训练好的RBF网络。图8(c)和图8(d)是加入噪声后的结果。加入噪声后拟合值和识别值吻合度也较好,其相对误差的最大值是3.9%,因此其抗噪声能力强。
4.2 C级路面不平度识别分析
根据以上轿车数据和式(1),仿真计算得到C级路面上的车身质心俯仰角加速度和垂直加速度,分别如图9和图10所示。代入以上训练好的神经网络来识别C级路面不平度。

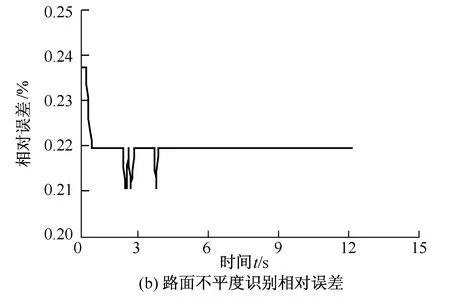

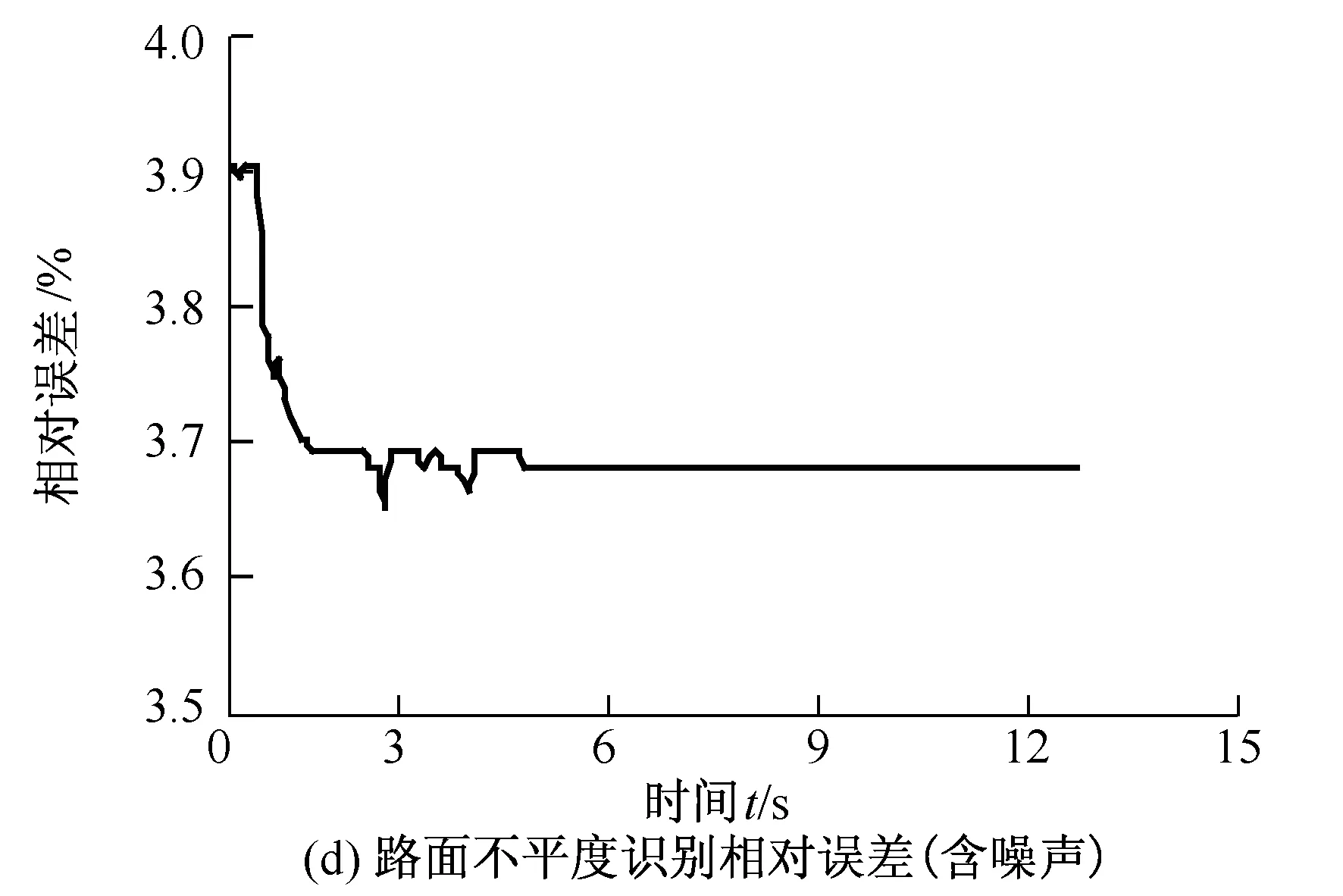
图8 B级路面不平度识别结果Fig.8 Identification result of level B road surface roughness
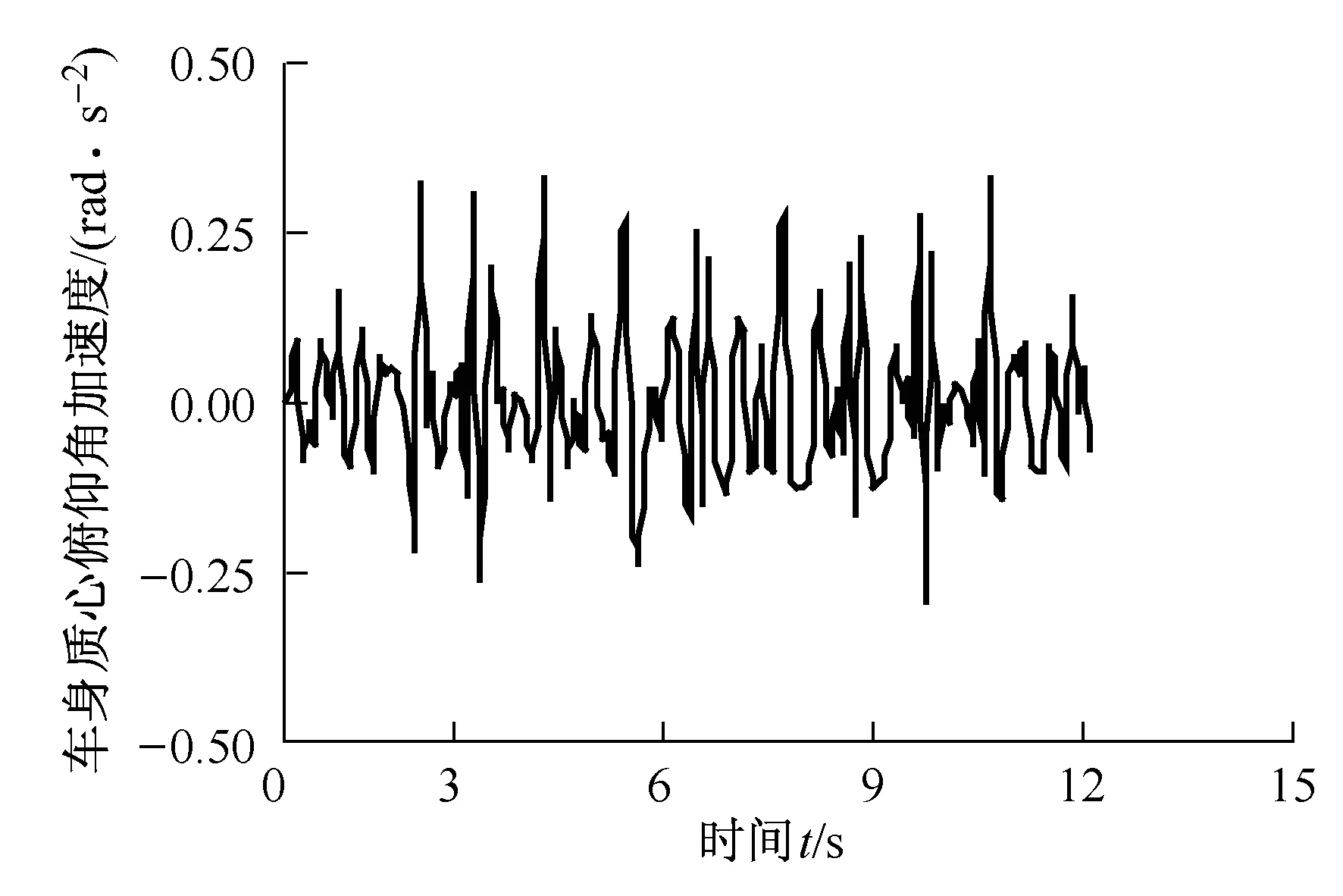
图9 车身质心俯仰角加速度(C级路面)Fig.9 Body centroid pitching angular acceleration(level C road surface)

图10 车身质心垂直加速度(C级路面)Fig.10 Body centroid vertical acceleration (level C road surface)
图11(a)是在C级路面上左前轮路面不平度的RBF神经网络识别值和滤波白噪声拟合值。从图中可以看出,拟合值和识别值有很好的吻合度。图11(b)是识别值和拟合值的相对误差。相对误差的最大值是0.42%,比B级路面的相对误差大。图11(c)和图11(d)是加入随机噪声后的结果,加入噪声后拟合值和识别值吻合度也较好,加入噪声后相对误差最大值是4.73%,因此其抗噪声能力强。



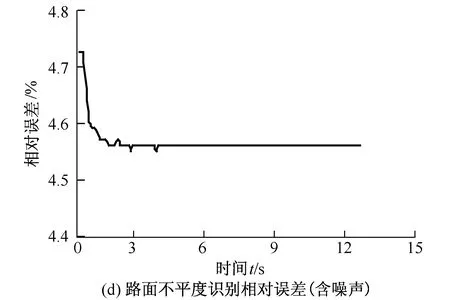
图11 C级路面不平度识别结果Fig.11 Roughness identification result of level C road surface
5 结 论
本文建立了7个自由度汽车振动模型,得到了车身质心垂直加速度和俯仰角加速度,建立了径向基函数(RBF)神经网络理想输入样本和输出样本,识别了B级和C级路面不平度。识别的B级路面和C级路面相对误差的最大值分别是0.24%和0.42%。加入噪声后识别的B级路面和C级路面相对误差的最大值分别是3.9%和4.73%。因此运用该方法识别路面不平度相对误差小,抗噪声能力强。识别出来的路面不平度对深入分析高速公路路面结构的动力响将有重要参考价值。
[ 1 ] 杨建荣,刘章军.车—桥耦合系统迭代解法研究[J].结构工程师,2007,23(4):40-44.
Yang Jianrong,Liu Zhangjun. Iterative procedure for dynamic analysis of vehicle bridge interaction[J].Structural Engineers,2007,23(4):40-44.(in Chinese)
[ 2 ] Sukhvarsh J,Sanjay G.Road surface roughness generation by power spectral density in bridge design[C]. Proceedings of the 2008 Structures Congress- Structures Congress 2008: Crossing the Borders, (314), 2008.
[ 3 ] Lu Z X, Zhao L Y, Li X Q, et al.Simulation of road surface roughness based on the piecewise fractal function[J].IFIP Advances in Information and Communication Technology, 2011,347: 294-305.
[ 4 ] 兰先亮.基于桥面不平度的车桥耦合振动分析[J].华东公路,2013,(2):52-55.
Lan Xianliang. Analysis on vehicle bridge interaction vibration based on bridge surface roughness[J].East China Highway,2013, (2):52-55.(in Chinese)
[ 5 ] 马颖,段虎明,石锋.典型道路谱的生成方法研究[J].振动与冲击,2013, 32(16):19-22.
Ma Ying, Duan Huming, Shi Feng. Generation method of typical road spectrum[J]. Journal of Vibration and Shock,2013,32(16):19-22.(in Chinese)
[ 6 ] 任宏斌,陈思忠,吴志成,等.车辆左右车轮路面不平度的时域再现研究[J].北京理工大学学报,2013,33(3):257-259.
Ren Hongbin, Chen Sizhong, Wu Zhicheng, et al.Time domain excitation model of random road profile for left and right wheels[J]. Transactions of Beijing Institute of Technology,2013,33(3):257-259.(in Chinese)
[ 7 ] 王望良,刘汉光,孟东阁,等.车辆道路模拟试验道路谱获取方法研究[J].工程机械,2013,44(8):18-24.
Wang Wangliang, Liu Hanguang, Meng Dongge, et al. Research of method to acquire roadway spectrums for vehicle simulation tests on roads[J]. Construction Machinery and Equipment,2013,44(8):18-24.(in Chinese)
[ 8 ] 赵衍,卢士富.路面对四轮汽车输入的时域模型[J].汽车工程,1999,21(6):112-117.
Zhao Heng, Lu Shifu. A vehicle’s time domain model with road input on four wheels[J].Automotive Engineering,1999,21(6):112-117.(in Chinese)
[ 9 ] 张丽霞.汽车操纵稳定性和平顺性中逆问题的研究[D].南京:南京航空航天大学,2007.
Zhang Lixia. Research on inverse problem in vehicle handling stability and ride comfort[D].Nanjing: Nanjing University of Aeronautics and Astronautics,2007.(in Chinese)
[10] 张丽霞,赵又群,徐培民,等.路面功率谱密度识别的仿真[J].农业机械学报,2007,38(5):15-18.
Zhang Lixia, Zhao Youqun, Xu Peimin, et al. Simulation on road surface power spectrum density identification[J]. Transactions of the Chinese Society for Agricultural Machinery,2007,38(5):15-18.(in Chinese)
