带PID调节器的高性能直流电动机双闭环调速系统
2014-08-25汪晓东钟建伟
张 俊,汪晓东,钟建伟
(1.国网恩施供电公司,湖北 恩施 445000;2.湖北民族学院 信息工程学院,湖北 恩施 445000)
带PID调节器的高性能直流电动机双闭环调速系统
张 俊1,汪晓东1,钟建伟2*
(1.国网恩施供电公司,湖北 恩施 445000;2.湖北民族学院 信息工程学院,湖北 恩施 445000)
转速反馈控制系统用PI调节器实现了无静差调节,并用电流环限制了电枢电流,消除了负载转矩扰动对稳态转速的影响,实现较好的动态过程.虽然其动态性能可以满足一般工业需求,但是对于最动态性能要求高的场合,传统的双闭环就无法满足要求.结合内模控制原理,提出了一种新型PID转速调节器,使系统具有更好的动态性能.经过MATLAB/SIMULINK仿真,结果表明控制系统能稳定运行在目标工作点,并且相比于传统的双闭环调速系统具有更好的动态性能和抗扰动性能.
直流电动机;高性能;调速系统;双闭环;内模控制
由于直流电动机的电枢绕组和励磁绕组磁耦合较弱,使得直流电动机有良好的运行特性且控制方式简单.直流电动机的机械特性硬,调速范围宽,且容易实现无极平滑调速,所以直流电动机在电气传动领域广泛的被作为电力执行元件[1-3].
闭环控制作为电力拖动控制系统的主要控制方式之一,能够是系统稳定的工作在目标工作点,并且具有较强的抗扰动特性.在直流电动机单闭环调速的基础上,用PI控制器实现了转速稳态无净差,并且消除了负载转矩对稳态转速的影响.但是,在这种控制方式下,无法限制启动电流,从而有可能导致烧毁电机.
然而,在传统的双闭环调速系统下,引入了电流内环,在转速环饱和的情况下,限制了电枢电流,解决了单闭环调速系统的缺点,但是其启动超调量较大,受扰动时,动态速降较大,恢复时间也较长[4-6].本文按照传统方式确定了电流环的参数,根据内模控制原理,确定了新型转速环的参数,使调速系统具有高性能的正反转工作状态.Matlab/Simulink平台仿真结果表明,系统能稳定运行,相比于传统的双闭环调速系统有更好的动态特性,调节时间大大减少,对负载突变时动态速降小,有更强的鲁棒性.
1 内模控制原理
如图1所示为内模控制的结构框图[7-8],P(s)为被控对象的数学型,M(s)为过程模型, Q(s)为内模控制器,R(s)为输入信号,Y(s)为输出信号,D(s)为扰动信号.将图1所示系统等效变换后得到图2的系统框图.
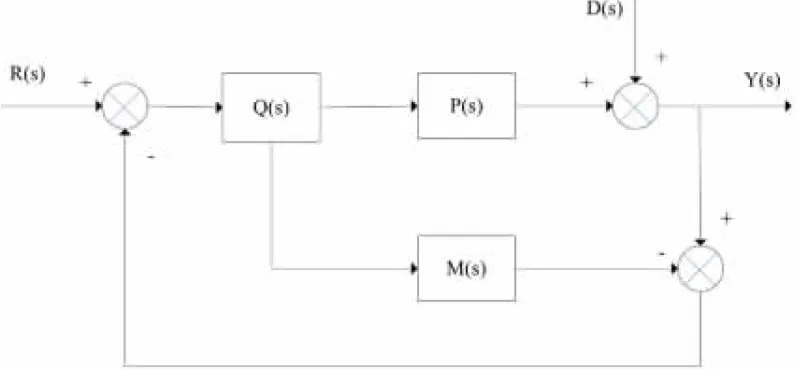
图1 内模控制系统结构框图
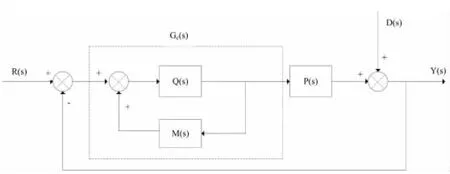
图2 等效变换后的系统框图

图3 双闭环调速结构系统结构框图
如图2所示,内模控制器的传递函数为:
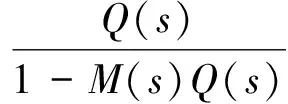
(1)

(2)
由上面的等效变换,得到系统的闭环传递函数为:

(3)
假设模型是精确的,即P(s)=Q(s).要使系统稳定的充要条件是,M(s)和Q(s)都是稳定的.而由闭环传递函数分析可得,若内模控制器Q(s)=M-1(s),可使系统输出Y(s)等于输入R(s),在扰动输入D(s)输入下,输出为0.
可以实现对输入信号的跟踪和完全抑制干扰的效果.然而现实中由于对象的时滞特性,采用理想的控制器对误差极为敏感,若模型不准确,很难保证系统的稳定性.所以在理想控制器上引入滤波器,使系统得到期望的动态性能和稳定性.
2 双闭环组成及对新型转速调节器参数的整定
图3所示为双闭环直流调速系统的稳态结构框图.调节器主要有两种工作状态,即饱和和不饱和.当调节器饱和时,输出为最大幅值,饱和的调节器使输出信号不能再跟随给定信号,相当于开环工作.实际上,正常工作时电流环不会达到饱和的状态,因此,对于静态特性来说,只有转速环饱和和不饱和两种工作状态.
转速环不饱和时,两个调节器都不处于饱和状态.作为外环的转速环起主导作用,电流环跟随转速信号与给定信号的误差信号,服从转速环的误差信号.稳态时,转速环输出信号为零.

此外,对于如图3所示系统,电网电压变化对调速系统也产生扰动作用.由于负载扰动能够比较快地反映到转速上,从而得到调节,而电网电压扰动的作用点离被调量要远一些,调节作用受到延滞,因此单闭环调速系统抑制电压扰动的性能要差一些.
对于双闭环系统而言,由于增设了电流内环,电压波动可以通过电流反馈得到比较及时的调节,不必等它影响到转速以后才能反馈回来,抗扰性能大有改善.因此,双闭环系统中电网电压波动引起的转速动态变化会比单闭环系统小得多.
对于电流环采取工程设计方法,并将其为Ⅰ型系统,则电流闭环传递函数为:

(4)

用等效代替环节代替电流环后,电流环的传递函数为:
(5)


图4 等效成单位负反馈和小惯性近似的处理
对等效变换后的结构图如图4所示,被控对象的传递函数变为:
(6)

根据内模控制原理,Wre(s)为P(s),新型的滤波器采用如下的传递函数.

(7)
那么内模控制器的传递函数为:

(8)
由式(1)得到,新型的转速环传递函数为:
(9)
很显然,这是一种PID控制器,但是只有一个可调参数.
3 仿真实验
直流电源参数:VS=220 V,开关管选用N沟道MOSFET.直流电机参数:Ra=0.06 Ω,La=0.001 2 H,Rf=20 Ω,Lf=0.05 H,Laf=0.07 H.ACR参数:P=9.8,I=17.传统ACR参数:P=0.000 86,I=0.002 98.新型的转速调节器ASR参数:P=7.207 40,I=0.133 3,D=0.007 733,电流反馈系数:β=0.01 6.转速反馈系数:α=1.
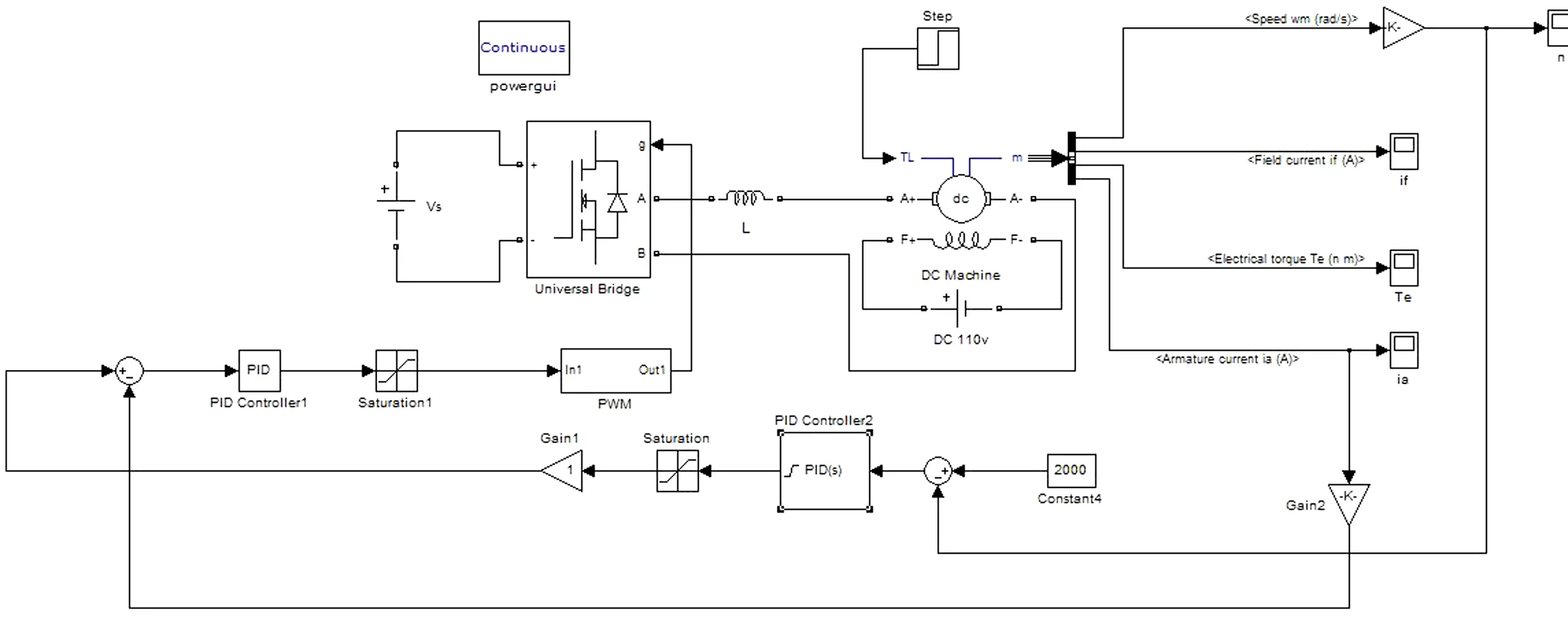
图5 仿真结构图
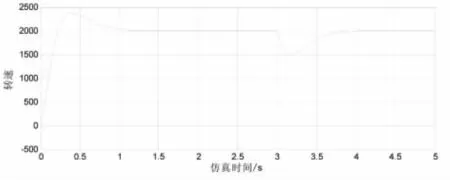
图6 传统转速环转速波形
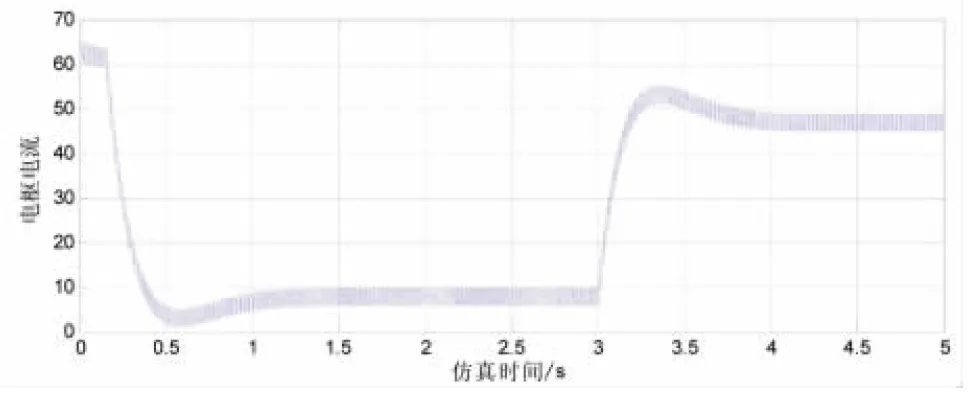
图7 传统转速环电枢电流波形

图8 新型转速环转速波形
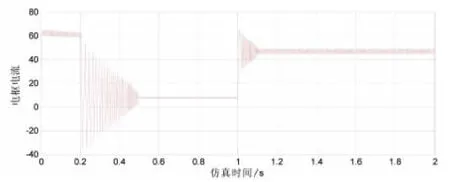
图9 新型转速环电枢电流波形
4 结论
本文设计了带PID转速环的双闭环直流电动机调速系统,建立了跟踪控制,实现了高性能动态调速.相比于传统的双闭环调速系统,其启动超调量,受扰动时,动态速降,调节时间等动态性能都大为提升.Matlab/Simulink仿真结果表明,由图9和图7可以看出,启动过程和受负载扰动时,新型转速环的电枢电流由最大电枢电流衰减到稳定的负载电流时间相比于传统双闭环大大减少了,这与之前分析的结论也相符合.
该控制器能保证系统在目标点稳定运行,具有高动态性能,对电机启动和负载突变都表现出非常理想的动态性能.
[1]Juan W Dixon,Ivan A Leal.Current control strategy for brushless DC motors based on a common DC signal[J].IEEE Transactions on Power Electronics,2009,17(2): 232-240.
[2]Pragasen Pillay,Ramu Krishnan.Modeling, simulation and analysis of permanent-magnet motor drives,part II:the brushless DC motor drive[J].IEEE Transactions on Industry Application,2009,25(2):274-279.
[3]Hijazi T M,Demerdash N A.Computer-aided modeling and experimental verification of the performance of power conditioner operated permanent magnet brushless DC motors including rotor damping effects[J].IEEE Transactions on Energy Conversion,2008,3(3):714-721.
[4]杨祖元,杨华芬.双闭环直流调速系统模糊PID控制研究[J].计算机应用研究,2011,28(3):921-923.
[5]章丽红,臧小惠.基于FUZZY-PID直流调速系统的仿真与分析[J].计算机仿真,2009,26(1):154-161.
[6]Libin W, Hui L,Yong K S.Fuzzy control based on self-adjusted parameter for brushless DC motor[J].Proceedings of the 2007 DEEE International Conference on Mechatronics and Automation,Harbin,China,2007,17(3):674-678.
[7]戴文战,丁良,杨爱萍.内模控制研究进展[J].控制工程,2011,18(4):487-492.
[8]Matausek M R,Micic A D,Dacic D B.Modified internal model control approach to the design and tuning of linear digital controllers[J].Int J of System Science,2001,33(1):67-79.
责任编辑:时凌
SimulationResearchonSpeedRegulationSystemofDoubleClosedLoopWithPIDAdjusterofDCMotor
ZHANG Jun1,WANG Xiaodong1,ZHONG Jianwei2
(1.State Grid Enshi Power Compary,Enshi 445000,China;2.School of Information Engineering,Hubei University for Nationalities,Enshi 445000,China)
With the feedback of speed control system,we use PI adjuster to realize zone-error adjustment and eliminate the influence of disturbance of load torque on speed,and use current loop to limit the current of armature, realizing the better dynamic quality.Although its dynamic quality can meet the common needs of industries, the traditional double closed loop are not satisfied in the occasions which request high dynamic properties.This article puts forward a new PID speed adjuster to make the speed regulation system has a better dynamic property according to the principle of internal model control(IMC).The result of the simulation on MATLAB shows that the control system can work at the point of destination steadily, which has a better dynamic property and disturbance-resistant performance than the traditional speed regulation of double closed loop.
DC motor;high property;speed regulation;double-closed-loop;internal model control
2014-05-23.
湖北省自然科学基金计划项目(2012FFB01102).
张俊(1970- ),男,高级工程师,主要从事电力系统运行与控制的研究;*
:钟建伟(1972- ),男,教授,主要从事电力系统运行与控制的研究.
TM641
A
1008-8423(2014)02-0211-04