基于不同滤波算法差异的机载LiDAR数据桥梁提取
2014-08-25谷延超范喆宇范东明
谷延超,范喆宇,范东明,林 鉴
(西南交通大学 地球科学与环境工程学院,四川 成都 611756)
基于不同滤波算法差异的机载LiDAR数据桥梁提取
谷延超,范喆宇,范东明,林 鉴
(西南交通大学 地球科学与环境工程学院,四川 成都 611756)
在对形态学滤波和区域生长算法研究的基础上,通过对桥梁的特点进行分析,提出一种基于形态学滤波和区域生长算法的滤波结果的差异进行桥梁探测的算法。算法不受桥梁形状的影响,桥梁可分叉、无需平行和等宽,甚至在部分桥梁数据不完整的情况下也有效。通过3个不同场景的桥梁实例验证算法的正确性。
形态学滤波;区域生长;桥梁探测;机载LiDAR
桥梁作为重要的人工建筑和交通枢纽,其信息在民用、军事、灾害评估上都发挥着极大的作用,桥梁的自动识别是一项困难而重要的任务。当前桥梁探测算法的研究工作主要集中在基于高分辨率遥感影像利用其光谱、形状、结构、纹理等信息进行桥梁探测[1]。机载激光雷达(Airborne Light Detection and Ranging)作为一种主动的新型测量技术,不受天气等因素的干扰,能够快速地获取大范围高精度的空间地理信息,已经得到了广泛的应用。与传统的遥感影像相比较,LiDAR记录地表的空间三维信息,使得空间对象的几何特征和拓扑关系更为明确,利用高程信息能精确地确定地表不连续的特征[2]。利用LiDAR数据进行桥梁探测的研究较少,其算法主要有基于剖面分析的桥梁提取算法[3-5]和顾及地形特征的桥梁提取算法[2]等。基于剖面分析的桥梁提取算法对一个或多个方向进行分析,确定潜在桥梁点,然后对其进行分割提取边界,当边界存在与地面点两边以上的连接时则可判断为桥梁;顾及地形特征的桥梁提取算法在渐进加密不规则三角网滤波的基础上,利用二维不规则三角网采用多个阈值对滤波得到的非地面脚点进行初步提取,同时进行分割且辅以面积判断桥梁主体点,最后利用顾及地形的点云区域生长算法得到桥梁点。本文则针对不同滤波算法的特点,利用形态学滤波和区域生长相结合进行桥梁探测。
1 形态学滤波
数字形态学作为图像处理的重要部分,已经广泛应用于点云滤波,并取得了较好的效果[6]。形态学利用一定形状的结构元对影像进行增强或者消除某些地物特征。形态学的基本操作包含腐蚀和膨胀,其定义为
腐蚀:

(1)
膨胀:

(2)
其中:f为规则化的影像,例如规则化的DSM,g为结构元素,结构元素可定义为不同形式,例如矩形结构元素、圆盘形结构元素等,Z(i,j)为形态学操作(腐蚀或膨胀)运算后规则化的影像中(i,j)的影像值,w为结构元素的窗口,Z0(s,t)为原始规则化影像中(s,t)的影像值。
腐蚀和膨胀运算组合后,形成开运算和闭运算用于LiDAR 点云数据处理,其数学表达为
开运算:
(f∘g)=((f⊗g)⊕g);
(3)
闭运算:
(f·g)=((f⊕g)⊗g).
(4)
开运算首先对目标影像f进行结构元素g的腐蚀操作,然后在腐蚀的基础上再进行膨胀操作;而闭运算则相反,先膨胀后腐蚀。
开运算应用于LiDAR 点云数据滤波,当结构元大于地物时,则地物将被移除。利用一个固定窗口大小的结构元素很难移除各种尺寸的非地面物体,如果窗口过小,则大部分地面点被保留,但仅有较小的地物(如车、树木)被移除,而城区的大型建筑物不能被移除。而利用过大的窗口,则能够将地物较好地移除,但是大量的地面点被误删。故一般情况下均采用渐变的窗口来进行滤波,在迭代过程中不断增大结构元素的尺寸。
2 区域生长算法
区域生长在遥感影像分类中得到了较多的应用,其是通过邻域元素利用某种判定条件寻找“同质”像素,进而达到分类的目标。区域生长以某个像素为生长点,比较相邻像素,将特征相似相邻像素合并,以合并的像素为生长点,重复以上操作,最终形成具有相似特征的像素集[7]。
LiDAR 点云数据滤波也可以理解为对点云数据进行分类,计算周围相邻的点与地面种子点的高差。当邻近点与种子点的高差小于设定阈值时则被判断邻近点为“新的种子点”, 依次搜索扩张,直到没有可接受的邻近点时,生长结束[5,8]。
在区域生长的过程中,滤波的精度对阈值的设定较为敏感,在进行阈值设定时应考虑地物、地形以及栅格大小进行设定。当阈值设定过小时,则会存在大量的地面点被误删,造成地形的过渡平滑;而当阈值设定过大时,则会存在部分地物未被移除。
3 桥梁探测
桥梁作为交通枢纽,是连接间隔地面的构筑物。对于跨河桥梁,桥道的标高应满足桥下排洪或通航的要求;对于跨线桥,则应保证桥下通行的安全,故桥梁与周边地形均有一定的高差,该高差一般情况下均大于1~2 m。无论是跨河桥梁还是跨线桥梁其坡度一般不会太大,一般情况下小于20%。故通常桥梁应具有以下一些特性:① 桥梁点高于周围地面点;②桥梁具有有限的宽度;③桥梁具有一定的坡度,但其坡度平缓;④桥梁具有一定的面积。本文基于上述特征对桥梁进行探测。
由1和2可知:基于桥梁特点①和②,当形态学滤波的结构元大于桥梁时,桥梁会被移除;基于桥梁特点③可知桥梁的坡度与地形的坡度基本一致,甚至在某些场景中,桥梁的坡度小于地形的坡度,故在区域生长的过程中桥梁会保留。考虑到现实地物中桥梁的独特性,将分别由形态学滤波和区域生长得到的数字高程模型作差得差分DEM,桥梁点即在差分DEM中体现,然后再利用桥梁的特点在差异中进行桥梁探测。
dDEM=DEMgro-DEMmor.
(5)
由上述桥梁特征可知:桥梁点在dDEM中所表现的差异为桥梁点高于周围地面点的高差,故高差判定阈值应该大于1~2 m,故由dDEM可得潜在的桥梁区域
Bridgepot={p≥Hthreshold|p⊂dDEM}.
(6)
上述的潜在桥梁区域Bridgepot包含了两部分:真实的桥梁区域和由于形态学窗口过大造成的地形过渡平滑所产生的区域。但是考虑到dDEM小于高差判定阈值的应为形态学窗口过大误删的地面点,故将该部分点与原有的形态学滤波DEMmor整合形成新的数字地面模型DEMnew。具体为:利用Bridgepot区域边界点基于不规则三角形对桥梁区域进行内插,将Bridgepot与内插值进行对比,将大于高差判定阈值的区域更新Bridgepot,小于高差判定阈值的区域更新DEMmor,迭代此步骤,直至Bridgepot的面积变化小于一定的阈值即可得最终的桥梁区域,同时也可得到整合的数字地面模型DEMnew。
综上所述,具体的基于形态学滤波和区域生长的LiDAR数据桥梁提取算法流程如下:
1)对LiDAR点云数据进行栅格化,得到原始栅格影像DSM。
2)利用渐变的窗口进行形态学滤波,要求最大滤波窗口应大于数据区域的最大建筑物的尺寸,得到数字高程模型DEMmor。
3)选定生长高差阈值进行生长,得到区域生长得到的数字高程模型DEMgro。阈值可以根据坡度与栅格尺寸进行选择,在进行桥梁探测时坡度应大于桥梁的坡度,一般情况下可选择最大坡度为30%左右。
4)将形态学滤波得到的DEMmor和区域生长得到的DEMgro进行作差,即可得差分DEM。
5)对差分DEM进行迭代分离地面点和桥梁点,最终得到潜在的桥梁区域。
6)对各潜在桥梁区域进行面积判断,当桥梁区域的面积大于设定面积时即为包含桥梁区域,同时进行桥梁区域细化,需要根据已经提取出的桥面的连续性删除桥梁周围的树木,以及恢复桥面上的汽车等地物。
4 实例验证
为了验证本文算法的有效性,对3个不同场景的桥梁进行实验。3个桥梁数据区域均来自于国际摄影测量与遥感协会提供的公共数据集(CSite2)。本文将以桥梁A进行详细的描述,其他桥梁则仅作简单分析说明。
数据集(CSite2)激光点间距约为1.0~1.5 m,重采样栅格大小为1.0 m,该数据集中最大建筑物的尺寸小于60 m,差分DEM的高差判定阈值为1 m,桥梁的面积阈值为100 m2。由于数据集区域较大,本文将提取桥梁附近区域的影像作以说明。
图1中,图1(a)为桥梁A周边的数字表面模型,可知:桥梁A为跨线桥,桥梁一端(右上角)地势较为平坦,另一端(左下角)地形呈山包状且桥梁位于山包顶部;图1(b)为采用渐变窗口形态学滤波得到的DEMmor,最大结构元为60 m,可知:在滤波的过程中桥梁、建筑物、植被等均为移除;图1(c)为区域生长得到的DEMgro,生长高差阈值为0.5 m,可知:在生长过程中树木、建筑物等地物被移除,而桥梁被保留;图1(d)为DEMmor与DEMgro作差得到的差分DEM,从图上可得出:差分DEM包含着桥梁和地形过渡平滑两部分,故需要对其进行这两类分离;图1(e)为将差分DEM分离出的地形与DEMmor整合得到的数字地面模型DEMnew,对比图1(b)、图1(c)可得:形态学滤波中地形过渡平滑的现象得到了改善,部分地形得到了很好的恢复; 图1(f)为将差分DEM分离出的潜在桥梁区域经过面积判断和桥梁区域细化后的桥梁,可得算法较好地提取了桥梁区域。

图1 桥梁A提取示意图
图2(a)、图2(b)分别为桥梁B周边的数字表面模型和最终提取的桥梁区域。桥梁B呈“L”型,桥梁左侧起于高处,右侧止于低处,桥梁主体坡度较小,然而桥梁右侧与地面有较大的高差,桥梁主体与右侧地面靠一斜坡连接。由图2(b)可知:桥梁主体提取较为完整,然而L型斜坡处的起始位置定位较为粗略,其主要原因是由于桥梁的起始位置并不完全符合假设桥梁的特征①。

图2 桥梁B提取结果
图3(a)、图3(b)分别为桥梁C周边的数字表面模型和最终提取的桥梁区域。桥梁C为分叉桥,且注意到右侧分叉并未与地面衔接属于不完整的桥梁。由图3(b)可知:桥梁提取较为完整,在部分桥梁不完整的情况下仍能够完整地提取出桥梁。
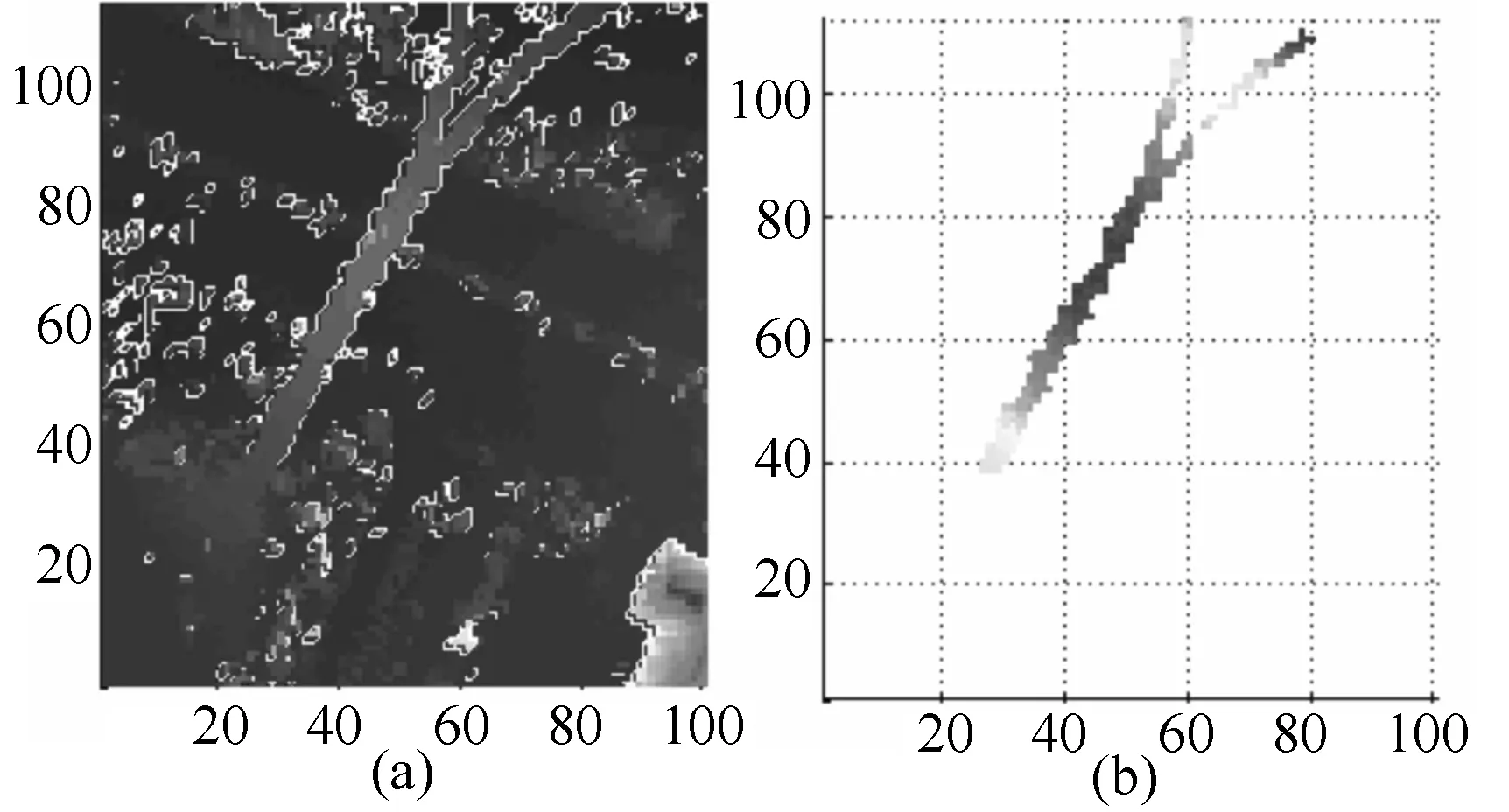
图3 桥梁C提取结果
5 结束语
机载LiDAR可直接获取地表点的三维坐标,使空间对象的几何特征和拓扑关系更为明确,使其在桥梁提取方面较高分辨率遥感影像而言有较为明显的优势[9-10]。本文根据桥梁在某些方向上与地面平缓连接的特性,分析了形态学滤波和区域生长滤波算法的特点,提出了基于两种滤波方法的差异进行桥梁探测的新算法。本文算法与桥梁的形状无关,无需桥梁平行、等宽,即使在部分桥梁数据不完整的情况下也有效。通过3个不同场景的桥梁实验证明,本文算法对桥梁提取有较好的效果。但本算法对于部分桥梁的起止位置未能够准确定位,仍需要在后续的研究中解决。
[1]梁菲,谭衢霖,刘亚岚,等.国产“环境一号”(HJ-1)卫星遥感影像桥梁提取研究[J].测绘工程,2011,20(5):13-17.
[2]李云帆,马洪超,邬建伟,等.顾及地形特征的机载LiDAR数据桥梁提取算法研究[J].武汉大学学报:信息科学版,2011,36 (5):552-555.
[3]G SITHOLE, G VOSSELMAN. Bridge Detection in Airborne Laser Scanner Data [J]. ISPRS Jour nal of Photogrammetry and Remote Sensing, 2006, 61(1): 33-46 .
[4]D FORSBERG. Automatic bridge detection in airborne laser scanned data [D]. University of Gothenburg, 2011.
[5]Shao Y C, Chen L C. Automated searching of ground points from airborne lidar data using a climbing and sliding method [J]. Photogrammetric Engineering and Remote Sensing, 2008, 74 (5): 625-635.
[6]T PINGEL, K CLARKE, W MCBRIDE, An improved simple morphological filter for the terrain classification of airborne LIDAR data [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 77: 21-30.
[7]余洁,余峰,张晶,等.结合区域生长与道路基元的高分辨率遥感影像道路提取[J].武汉大学学报:信息科学版,2013,38 (7):761-764 .
[8]成晓倩,赵红强.基于区域生长的LiDAR点云数据滤波[J].国土资源遥感,2008(4):6-8.
[9]董淑鹏,驾蔚.机载LiDAR系统在公路断面测量中的应用与精度分析[J].测绘与空间地理信息,2014,37(9):170-172.
[10]谷延超,范东明.基于地形的LiDAR数据缺失区域填充方法的研究[J].测绘工程,2014,23(10):23-26.
[责任编辑:刘文霞]
Extracting bridge from airborne LiDAR data based on the difference between diverse filtering methods
GU Yan-chao, FAN Zhe-yu, FAN Dong-ming, LIN Jian
(School of Geoscience and Environment Engineering, Southwest Jiaotong University, Chengdu 611756, China)
Through the research on morphological filter and regional growing, a method of bridge extracting is proposed based on difference between above filtering methods. Combining the characteristics of bridges, the bridges can be extracted from the difference of filtered DEM. The proposed method is adaptable to different bridge designs. Therefore, bridges need not parallel edge or uniform width. Furthermore, a bridge can split into parts, and a bridge can be part of the whole bridge, etc. Three different bridges are conducted to demonstrate the efficiency of the proposed method.
morphological filter; regional growing; bridge extracting; airborne LiDAR
2013-10-02;补充更新日期:2014-10-05
中央高校基本科研业务费专项资金项目(SWJTU10ZT02)
谷延超(1989-),男,硕士研究生.
TP75
:A
:1006-7949(2014)11-0067-04