履带式遥控风力灭火机的设计与研究
2014-08-23杨春梅经凤明孟德宇潘云峰申景博
杨春梅,杨 博,马 岩,经凤明,孙 奇,孟德宇,潘云峰,申景博
(东北林业大学 林业与木工机械工程技术中心,哈尔滨 150040)
1 履带式遥控风力灭火机的工作原理
履带式遥控风力灭火机是将履带式工程机械与无线遥控技术、电子控制技术与液压相结合的产物。其基本构成包括遥控发射装置、遥控接收装置(安装在履带式遥控风力灭火机上)和整机机械系统[1-2,7]。遥控器将指令发送给安装在履带式遥控风力灭火机上的接收装置,经调解、译码和驱动后,传给输出电路,安装在整机上的电—液(机械)转换元件,在电路系统的作用下分别驱动相应的传动机构与执行元件,最终完成相应功能部件的预定动作,如发动机的点火、熄火和油门控制,风管摆动控制,制动、转向和档位控制等,如图1所示为遥控履带式风力灭火机工作的原理图。
2 履带式遥控风力灭火机总布局的确定
根据履带式遥控风力灭火机总体布局的基本要求和工作原理,可确定灭火机的总体布局,如图2所示为本设计的三维总装配图。本设计采用左右对称布置的双风机系统,主要工作过程为发动机输出转矩,一部分传递给主轴,主轴带动风机旋转;同时,另一部分传递给底盘驱动轮,驱动轮驱动底盘行驶。操作人员根据火势发展实时遥控风管摆动进行灭火并遥控底盘的移动和转弯。初步确定履带式遥控风力灭火机由动力分配系统,履带底盘系统,风机系统和电—液系统等组成。
履带式遥控风力灭火机的底盘与风机的驱动力来自于柴油机,柴油机启动后,经过动力分配系统后,分别传递给底盘系统和风机系统,风机旋转在风机蜗壳内形成高速高压气流,经风管甩出进行灭火,整机的移动与风管的摆动由遥控装置分别控制。
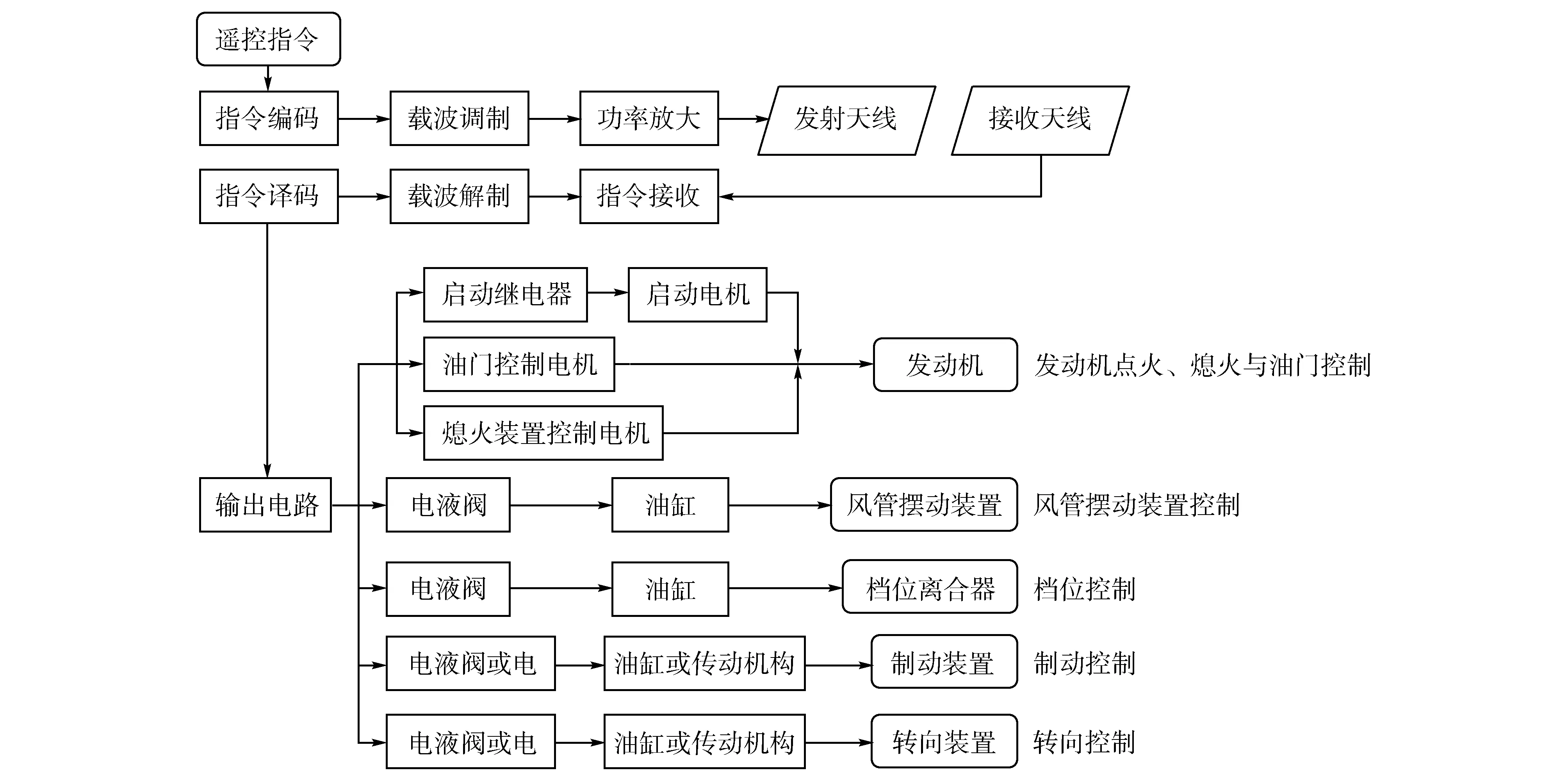
图1 遥控履带式风力灭火机工作原理图
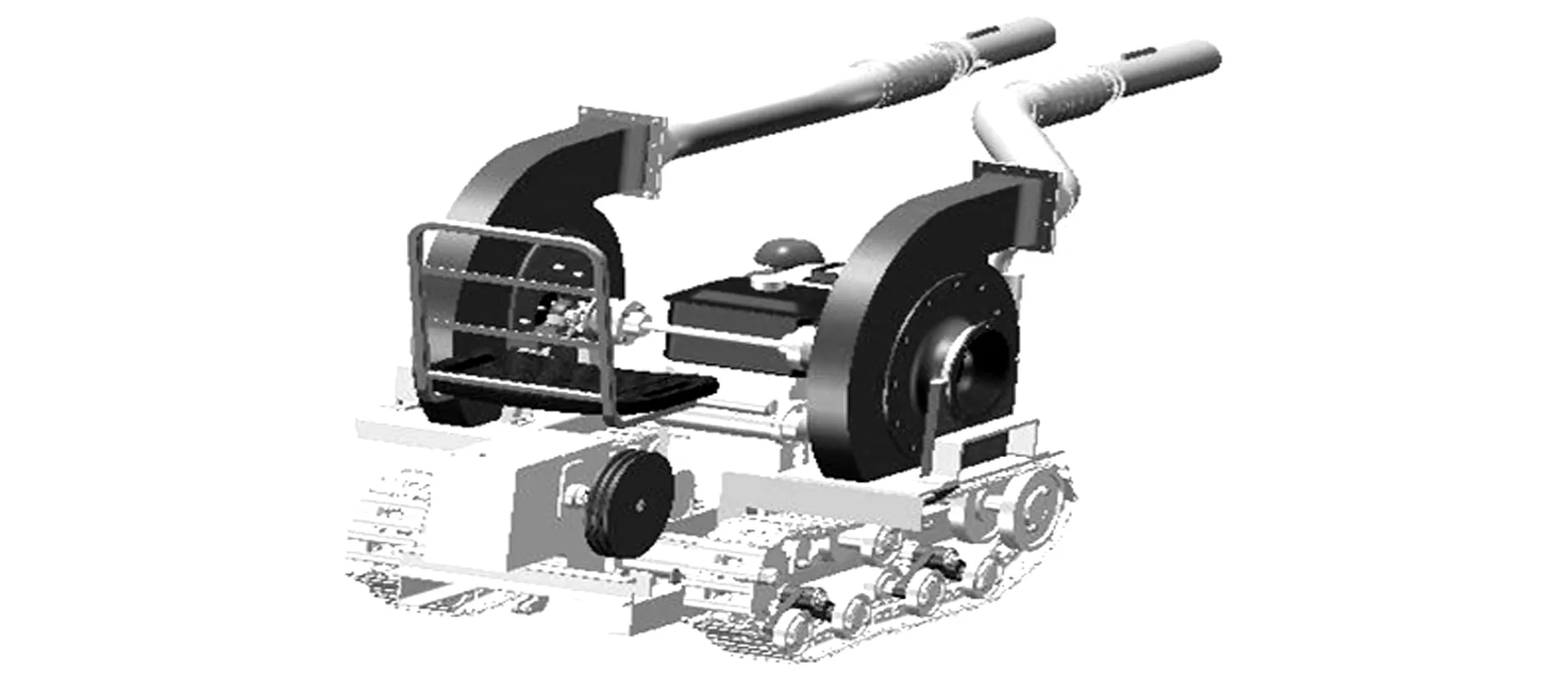
图2 履带式遥控风力灭火机三维模型
3 履带式遥控风力灭火机行走机构设计
3.1 行走机构的构造
遥控风力灭火机的行走机构,即履带底盘,主要由履带、驱动轮、托带轮、支重轮、履带张紧装置、导向轮和机架等组成。行走系的作用是:一方面支撑整机的全部重量;另一方面将发动机传给驱动轮的驱动扭矩转化为驱动力,并将轮子的旋转运动转化为整机的水平移动[3-4]。与轮式行走系比较,履带式行走系具有支承面积大,滚动阻力小、牵引附着性能好等优点。
3.2 行走机构的设计要求
履带底盘是遥控风力灭火机的行驶机构,其性能直接影响遥控风力灭火机在林间移动的性能,所以在行走机构的设计中,需要合理的设计与之相关的参数。遥控风力灭火机的行走机构需要具备较强的爬坡越障能力,并且适合行驶于复杂的森林地形与路况环境。遥控风力灭火机在行驶过程中,需同时承受自身的重力与工作时的外力作用,故行走机构必须保证整机的稳定性和安全性[5-8]。遥控风力灭火机在进行草原森林灭火时,路况复杂,履带底盘占整机的比重大,结构比较复杂,同时要求其在火灾扑救过程中灵活移动,因此,合理设计遥控风力灭火机履带底盘可提高工作效率。
行走机构的设计应根据履带式机械的设计准则及要求,满足以下4点要求:
(1)较强越障、爬坡能力(能爬35°陡坡)与较大驱动力,保证遥控风力灭火机在复杂林地与路况中平顺地行驶。
(2)确保在有坡度的路面工作时,不会出现打滑、溜坡及超速等现象。
(3)履带与地面的接触面积充足,保证遥控风力灭火机在松散路况中稳定行走。
(4)履带式遥控风力灭火机在不灭火时可作为交通运输工具,底盘的外形尺寸设计应符合道路运输设计要求。
4 确定行走机构的主要性能参数
4.1 行驶速度
履带式遥控风力灭火机可由大型运输工具载运或工作人员驾驶至森林火灾现场。在进行扑救工作时,履带式遥控风力灭火机在林区中行驶,并不是作恒定的等直线运动。由于行驶系中的履带在驱动轮的作用下作卷绕运动,运动速度并不是常数,所以常用平均速度来表示行驶速度,则:
(1)
式中:v为平均速度,m/s;ωk为驱动轮角速度,s-1;lt为履带链轨节距,m;nk为驱动轮转速,r/min;Zk为驱动轮有效啮合齿数。
由于实际的行驶过程中,履带与地面存在着一定的滑转运动,实际行驶速度由台车架相对链轨的相对速度vT与履带的滑转速度vi进行合成,则
v=vT-vi。
(2)
式中:v为实际行驶速度,m/s;vT为理论行驶速度,m/s;vi为履带相对地面的滑转速度,m/s。
针对履带式遥控风力灭火机的工作特点并参考小型履带式机械的行驶速度,选定最低档和最高档的理论行走速度:vTmin=1.5~2 km/h,vTmax=8.5~10.5 km/h。履带式遥控风力灭火机设置2个工作档、1个运输档和1个倒档,以便适应不同的工况。履带式遥控风力灭火机整机的净重量为515 kg,选定最低档理论速度为1.5 km/h,最高档理论速度为10 km/h,倒档理论速度为1.5 km/h。
4.2 爬坡能力
履带式遥控风力灭火机的工作环境要求其行走系有较强的爬坡能力,即整机的静稳定性。参考小型履带式机械的爬坡能力,初步选定爬坡角度α的区间为30°~35°,即58%~70%。初步确定爬坡角的范围后,通过理论分析计算法确定爬坡角α的具体数值。行走系爬坡时遇到几种阻力,即:
履带式遥控风力灭火机自重在斜坡方向的分力
Wp=Gsinα。
(3)
式中:G为履带式风力灭火机自重,N;α为坡度角。
履带式遥控风力灭火机的运行阻力:
Wy=0.2Gcosα。
(4)
式中:0.2为运行阻力系数。
则最大牵引力T应不小于这些阻力之和,即:
T≥Wp+Wy。
(5)
此外还要确保履带底盘在爬坡时不发生打滑,即:
φGcosα≥T。
(6)
式中:φ为履带与地面的附着系数,见表1。
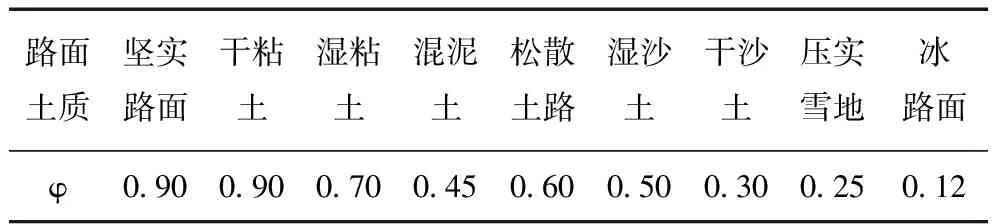
表1 履带与地面的附着系数
求解公式(5)和公式(6)即可求得最大的坡度角α=35°,表示履带式遥控风力灭火机的最大爬坡能力。
4.3 通过能力(接地比压)
行走底盘的通过能力将直接影响整机的承载能力与工作效率,它是指整机在不同路面上作业与行驶的能力,用接地比压P衡量。若两条履带与土壤完全接触,履带式遥控风力灭火机的重心位于其机械中心,如图3所示。
图3 履带对地面的压力为均匀分布
则有:
(7)
或
(8)
式中:P为履带平均接地比压,Pa;m为履带式风力灭火机工作质量,kg;g为重力加速度,m/s2;b为履带板宽度,m;L为履带接地长度,m;h0为履带高度,m。
履带的主要参数见表2。

表2 履带主要参数
求解公式(7),得:
平均接地比压P是履带式遥控风力灭火机的一个重要指标,因此在总体布置时尽可能 是整机的垂直载荷均匀、对称地分布在履带的接地区段,才能确保整机工作时具有良好的通过性与稳定性。
4.4 最大牵引力
履带式遥控风力灭火机底盘的牵引力要比各种外部阻力大,并且要比地面的附着力小。
假设履带式风力灭火机底盘爬坡时不进行转弯,其最大牵引力即为其最大爬坡能力,不考虑转弯的情况下计算,则整机最大牵引力T计算公式为:
T=Tf+Tt=fG+sinαG。
(9)
式中:Tf为滚动阻力;Tt为坡道阻力;f为滚动阻力系数,见表3;α为最大设计坡度角;G为整机所受重力。
表3 滚动阻力系数f
根据履带式行走机构最大牵引力的经验公式,最大牵引力也可以通过整机质量的比例进行计算,如公式:
T=(7.0~8.5)m。
(10)
式中:T为最大牵引力,N;m为整机质量,kg。
针对履带式遥控风力灭火机底盘要求的转弯、爬坡的能力比较高,行走机构的最大牵引力计算可根据如下公式:
T=5.7m+14454。
(11)
式中:T为最大牵引力,N;m为整机质量,kg。
求解公式(11),得最大牵引力:
T=5.7×515+14454=17.4kN。
5 行驶机构的主要外形尺寸分析
5.1 履带底盘的接地长度和轨距
履带式遥控风力灭火机底盘的接近角和离开角数值都不大,则轴距A(即导向轮与驱动轮两轮的轮距)近似等于接地长度L。接地长度L和轨距B是影响行走系性能的重要参数。合理选取L和B能使行走系的性能得到很大提高,其中包含转弯能力的增加。
接地长度L、轨距B与整机质量m关系式为
L=0.2m+860。
(12)
B=0.112m+574。
(13)
式中:L为接地长度,10-3m;B为轨距,10-3m;m为整机质量,kg。
求解公式(12)和公式(13),得接地长度L=963 mm,轨距B=636 mm。
在复杂的路况行驶时,由于履带式遥控风力灭火机重心不稳定以及路面崎岖不平,行驶机构的接地比压不是常数,行驶过程中将出现最大接地比压Pmax,其公式为:
(14)
从公式(14)得出,L/B应该较大,以防止Pmax值增大,避免降低行驶机构的通过性。
行驶机构在进行原地转弯时受到多个外部力,其中转弯阻力Tz可以根据以下公式解得[9]:
(15)
式中:μ为履带板与地面的摩擦系数。
从公式(15)得出,L/B应该较小,以防止Tz值增大,避免降低行驶机构原地转弯的能力,因此应恰当的选择L/B的比值。
L/B比值初步确定后,可以使用理论分析计算法来选定[10]:
(16)
式中:α为履带板修正系数,α=(b/500)1/3;b为履带板宽度,10-3m;G为整机机重,N;T为行走最大牵引力,N。
S<2.1时,原地转弯的性能良好;2.1
(17)
5.2 履带底盘最小离地间隙
最小离地间隙h是履带式遥控风力灭火机行驶机构的重要设计参数,它直接影响到整机的重心位置以及稳定性,取h>0.13 m1/3,根据经验可得最小离地间隙与整机质量关系式
h=0.0162m+254。
(18)
式中:h为最小离地间隙,10-3m;m为整机质量,kg。
求解公式(18),得h=262 mm。
根据以上计算分析,可知履带式遥控风力灭火机行走系的最大爬坡角α=35°,平均接地比压
P=28.04×103Pa,最小离地间隙h=262 mm,说明履带式遥控风力灭火机行走机构具有较强的通过性和爬坡能力,可确保整机在工作过程中安全和稳定地移动。
6 结束语
本设计最大的特点是采用了双风机系统,并将双风机系统对称安装在小型履带式行走系的两侧上方,运用远程遥控技术对整机的移动和风管的摆动进行控制,在进行火灾扑救时,操作者站在距离履带式遥控风力灭火机100 m外的安全位置,通过操纵独立的遥控按钮控制整机的行驶与风管的左右、上下摆动。相比传统的纯机械传动而言,电子控制技术与液压传动技术的结合,可简化这个设备的复杂程度,降低整个产品的生产成本,维修保养更加方便。
【参 考 文 献】
[1]赵 越,齐英杰,姜新波.履带式风力灭火机的设计[J].林业机械与木工设备,2011,39(8):42-43.
[2]杨春梅,吴 楠.自走风力灭火机离合电机控制精度的研究[J].森林工程,2013,29(6):86-91
[3]马 岩,张明松,杨春梅,常春媛.森林火灾的危害及重要手段的分析[J].森林工程,2013,(6):25-27.
[4]Yu S,Yang C,Ren C,et al.Cutting force analysis of large branch crusher based on the finite element[J].Mechanical Engineering and Materials,2012,152-154:900-905.
[5]魏茂洲,王克印.森林灭火装备的现状与展望[J].林业机械与木工设备,2006(7):11-14.
[6]陈 韵.林火扑救优效组合技术研究[D].北京:北京林业大学,2007.
[7]任 海,高昌海,王晓辉.国外森林火灾扑救新技术及设备[J].林业机械与木工设备.2005(7):7-9.
[8]李攀旭,王顺喜,何 鹏,等.我国草原森林风力灭火机问题探讨[J].林业实用技术,2007(12):42-43.
[9]蔡增基,龙天渝.流体力学泵与风机(第4版)[M]北京:中国建筑工业出版社,1999.
[10]Bons J P,Taylor R P,MeClain S T.The many faces of turbine surface roughness[J].ASME J.Turbomachinery,2001,123(4):739-748.