数字天顶摄影仪中星象匹配识别与匹配星表编制
2014-08-21宋来勇曾凡祥
宋来勇,曾凡祥
(广州海洋地质调查局海洋地质勘查技术方法所,广东 广州510760)
0 引 言
垂线偏差是铅垂线与参考方向之间的夹角,表征重力的方向,反映了大地水准面相对于地球椭球的倾斜,在大地测量归算、地球重力场和大地水准面精化等方面具有重要应用[1]。
数字天顶摄像仪集成CCD/GPS[2-3],利用CCD对测站天顶恒星进行照相,通过CCD图像处理,得到CCD中恒星影像的亚像素位置及星等信息等[4],再对曝光时刻的星表星历数据处理,根据平面坐标和赤道坐标转换公式,就可以实现CCD观测星像与星表中恒星匹配识别,计算铅垂线天文坐标,利用GPS获得大地坐标[4],根据天文大地测量原理,就可以测量高精度的垂线偏差[5-6]。
利用数字天顶摄像仪测量高精度垂线偏差的关键之一就是实现CCD恒星星象快速精确匹配识别。这就需要编制适合数字天顶摄影仪的高精度高密度的匹配星表数据库,通过坐标转换,实现CCD影像平面中恒星星象与天顶切平面中恒星匹配识别。现阶段,星象匹配识别算法主要有概率统计算法[7]、三角形算法[4,8-9]、栅格算法[9-10]、基于遗传算法的方法[11]、匹配组算法[9]和基于神经网络的算法[11]等。已有的星图匹配算法主要针对星敏感器姿态确定,而恒星敏感器观测视场较大,探测星等能力低,导航星表小[12-13]。
而本文研究所依据的数字天顶摄影仪的CCD可以对暗至13 m~14 m的恒星进行成像,视场为3°左右,正常天气状况下,每次拍摄可得到数十颗到上百颗不同亮度恒星星象。根据处理效率与精度要求,使得星象匹配识别处理愈加关键,而以往算法不适合对数字天顶摄影仪星象处理。基于此,在已有星图匹配算法基础上提出一种新的控制三角形匹配算法,利用CCD影像平面中星象与天顶切平面中恒星的三角形角、三角形边长及星等信息作为判定条件,快速准确实现CCD影像平面中星象与切平面中恒星的控制星和参考星识别匹配,完成CCD图像中恒星影像与曝光时刻天顶区域的恒星一一配对识别。并选用高精度的Hipparcos、Tycho-2星表,通过建立星表编辑准则,分别编制了适用于数字天顶摄影仪的控制星和参考星匹配星表数据库。实测数据表明:0.3 s内完成一幅3073×2048大小的CCD实测图像星象准确匹配识别。
1 一种新的控制三角形匹配算法
数字天顶摄影仪,如图1所示,视场大约两度,每次拍摄可得到数十颗到上百颗暗至13m-14m恒星成像等特点,在此提出一种新的控制三角形匹配算法,利用CCD影像平面中星象与切平面中恒星的三角形角、三角形边长、及星等信息作为判定条件,依次实现CCD影像平面中星象与切平面中恒星控制星和参考星识别匹配。匹配工作主要包括三角形信息计算、CCD影像平面中星象星等计算、控制星匹配、参考星匹配。

图1 CCD天顶照相望远镜实图
1) 控制星匹配准则
① 根据曝光时间及GPS测得的大地坐标,首先确定天顶区域,并在对恒星星表进行视位置改正后,截取数字天顶摄影仪视场区域内星表恒星信息。
② 根据初始天文坐标,把天顶区域恒星投影到切平面中,把赤道坐标转化为切平面坐标。
③ 建立天顶切平面中任意三颗星组成的所有三角形的三角形信息,包括三个角度,三个边长,三个星等信息,作为匹配数据库。
④ 再计算CCD影像中心附近区域最亮的三颗恒星星象(假设为a、b、c)的三角形abc信息。包括角度,边长,星等差。
⑤ 利用三角形abc的信息与第三步得到的匹配数据库做控制星匹配,寻找切平面中与CCD影像面中最亮的三颗星象一一对应匹配的三颗星A、B、C。控制星匹配判定条件为三个边长乘以一常数倍数后的差(倍数由焦距确定),三个角度差,三个星等差。对角度筛选矩阵、边长筛选矩阵、星等筛选矩阵进行求交集运算,寻求所有三角形信息中满足所有限制条件三角型组合,即为与CCD影像中最亮的三颗三角形匹配的三角型组合。需要注意的是此时三角形三个边、三个角、三个星等要根据三颗星的六种排列顺序进行六种排列方式。
2) 参考星匹配
把CCD图像中搜索出的除星象a、b、c外的所有星象作为参考星,利用已经找出的三颗CCD控制星a、b、c和匹配数据库中的恒星A、B、C,实现参考星与匹配数据库的匹配识别。
① 计算CCD影像平面中任何一颗星象与控制星象a、b、c每一颗星的距离,同时其星等也作为判定信息。
② 在切平面中求出匹配数据库中任何一颗恒星与恒星A、B、C每一颗星的距离,其星等也作为判定信息。
③ 求出边长倍数差及星等差作为匹配判定条件,实现参考星匹配识别。
④ 在参考星匹配的过程中,受双星等情况的影响,CCD影像中的一颗星象有可能被切平面中几个星象匹配。此时把这几个重合的匹配组合删除,不参与垂线偏差的计算。
2 编制匹配星表数据库
现代天体照相测量星表主要有伊巴谷星表,第谷星表,UCAC星表等。
依巴谷星表是欧洲空间局(简称ESA)依巴谷天体测量卫星(Hipparcos)计划的主要成果。其中在1989年11月至1993年3月共40个月期间,卫星观测得到了高质量的科学资料,得到平均观测历元1991.25的118,218颗恒星的位置、自行和视差的精度分别好于0.001″、0.001″/y、0.001″。绝大部分恒星星等小于11等。
Tycho-2星表是通过对AC星表和Tycho-1星表处理得到的,Tycho-2是当前比较常用的照相参照星表,其包含2,539,913颗恒星的位置,自行和色指数数据,还有大于0.8角秒的双星数据. 此星表含盖99%的11等星,90%的11.5等星。极限星等15m,平均位置精度为60 mas,平均自行精度为2.5 mas/y。Tycho-2星表没有系统误差。Tycho-2星表系统为J2000.0的国际天球参考系(ICRS)。
UCAC星表全称是US Naval Observatory CCD Astrograph Catalog美国海军天文台CCD巡天照相星表,最新版本为UCAC3星表。它是高密度高精度星表,覆盖整个星空的7.5到16等星。
经过国内相关学者研究发现,UCAC-3星表自行存在问题,故在此选用伊巴谷星表作为控制星表来源星表,在此Tycho-2星表作为参考星星表来源星表。
1) 编制控制星匹配星表数据库
由EditPlus和Hipparcos星表的简介观察确定Hipparcos星表数据格式,编写Matlab读取函数Hipparcos_Read,实现Hipparcos星表读取并且以字符串的形式作为输出,由于用到的主要是赤经、赤纬、赤经自行、赤纬自行、星等等,所以其余用不到的信息直接剔除。
读取与编制过程如下:
① 由于Hipparcos星表数据格式固定,首先利用fgets函数得到一行数据的所占位数,以及找到数据的格式,找到数据之间的分隔符,由EditPlus和Hipparcos星表的简介观察确定数据格式,然后fread读入文件,由于fread读入的格式为一整列,且为ASCII的形式,利用reshape命令先把数据分开,重新组织数据,使得每行的数据与在EditPlus中读取的格式一致。
② 剔除视差大于0.01″的恒星数据行。
③ 剔除没有赤经赤纬信息的恒星数据行。
④ 剔除变星,即亮度变化的恒星数据行。
⑤ 提取代表恒星编号、赤经 、赤纬、赤经自行、赤纬自行和星等的数据列,组成Hipparcos匹配星表数据(Hipparcos_Data.mat),并保存。
根据Hipparcos星表编辑适用于数字天顶摄影仪的匹配星表数据Hipparcos_Data数据J1991.25时刻密度分布图如图2所示:

图2 Hipparcos适用星表数据J1991.25时刻恒星密度分布
全天区面积共41 252.961 25平方度,根据Hipparcos星表编制的Hipparcos_date数据统计信息如表1所示。
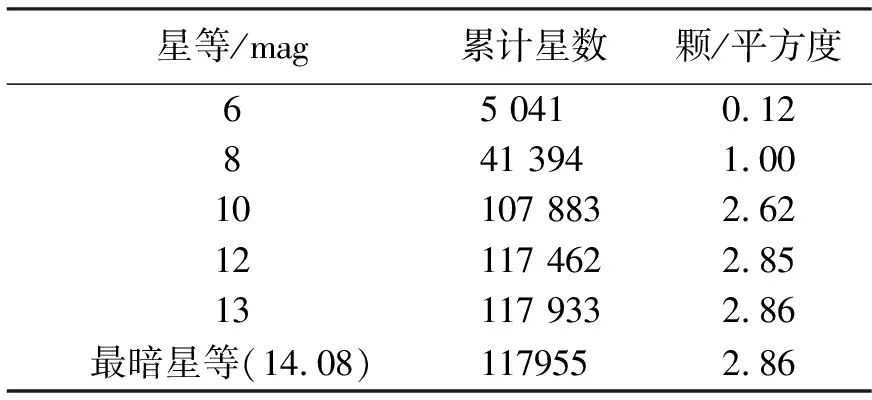
表1 Hipparcos适用恒星数据统计信息
2) 编制参考星匹配星表数据库(Tycho-2星表读取与数据处理)
Tycho-2星表由20个数据文件组成,由EditPlus和Tycho-2星表的简介观察确定数据格式,编写函数Tycho2_Read,依次实现20个数据文件的读取,组成Tycho-2星表,并且以字符串的形式作为输出,提取有效恒星数据的赤经、赤纬,赤经自行、赤纬自行,视星等信息等。
Tycho-2星表读取及编辑过程如下:
①与Hipparcos星表相似,根据Tycho-2数据格式,查找数据间分隔符,重新组织数据,使得每行数据与EditPlus中读取的格式一致。
②剔除视差大于0.01″的恒星数据行。
③剔除没有赤经赤纬信息的恒星数据行。
④剔除变星,即亮度变化的恒星数据行。
⑤剔除视星等小于14m的所有恒星数据行。
⑥恒星“ID”设计:Tycho-2星表中没有针对每一颗恒星给出一个恒星编号,为了使每一颗恒星拥有唯一的编号,方便查找需要对每一颗恒星给予其唯一的“ID”编号,设计方法是:把每一颗恒星的前三列数据TYC1、TYC2、TYC3,按照倒序排列的形式(TYC3_ TYC2 _TYC1)作为每一颗恒星的ID编码。
⑥提取代表恒星编号的ID、赤经 、赤纬、赤经自行、赤纬自行和星等的数据列,组成Tycho-2匹配星表数据(Infomation_Tycho2.mat),并保存。
Infomation_Tycho2数据J2000.0时刻恒星密度分布图如图3所示:
根据Tycho-2星表编制的适用于数字天顶摄影仪参考星匹配星表数据(Infomation_Tycho2.mat)统计信息如表2所示。

表2 Tycho-2适用恒星数据统计信息
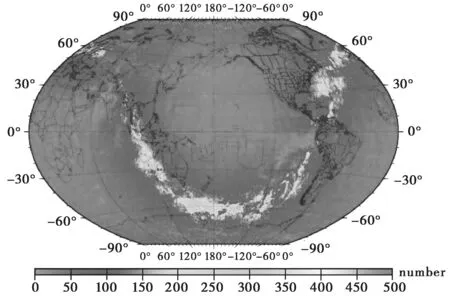
图3 Tycho-2适用恒星J2000.0时刻密度分布
3 实测CCD星象处理分析
1) 赤道坐标与切平面坐标转换
恒星赤道坐标属于球坐标系,为了建立与影像平面坐标之间的关系,需将赤道坐标投影到过接近天顶相切的切平面上,建立切平面坐标系(l,m),在天球坐标系中以初始天文坐标(δ0,α0)作切平面,切点为Q,将(δ0,a0)点附近的恒星赤道坐标(δ,α)投影到切平面上,就得到对应的切平面坐标,如图4所示。此时切平面与CCD影像平面近似平行。

图4 切平面投影原理
投影变化公式为
(1)
m=tan(q-δ0),
(2)
式中,cotq=costδcos(α-α0),δ0=φ,α0=λ+GAST.
2) 结果分析
以2011年11月30日实际拍摄的Fits图像为例,利用GPS授时及测量的大地坐标,精确计算曝光时刻的天顶区域恒星视位置,在算得光轴中心和CCD方位的基础上,实现影像坐标仿射变换及天顶恒星赤道坐标与切平面坐标转换,完成星象匹配识别,如图5为CCD星象中控制星与参考星。图6,7分别示出匹配出控制星、参考星匹配结果,并与国家天文台软件比较。
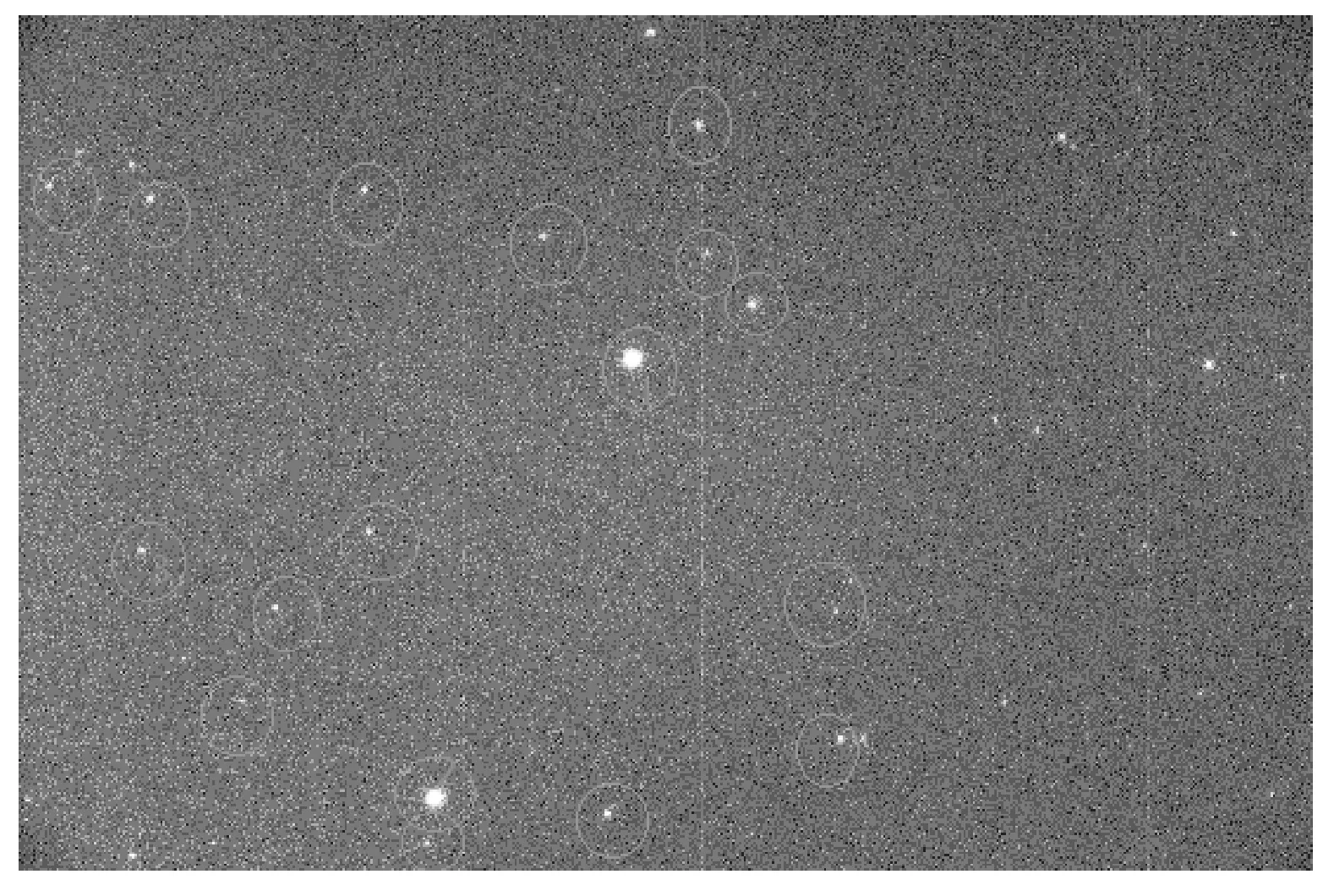
图5 CCD星象中的控制星与参考星
其中星象匹配识别中,边长倍数常数为130 000,边长判定上限为150,角度判定上限为1°,恒星星等差上限为0.5 mag.

图6 匹配星表中寻找到的控制星

图7 匹配星表中寻找到的参考星
4 结 论
本文提出一种新的控制三角形匹配算法,利用CCD影像平面中星象与天顶切平面中恒星的三角形角、三角形边长及星等信息作为判定条件,快速准确实现CCD影像平面中星象与切平面中恒星的控制星和参考星识别匹配。并详细给出了控制星与参考星的匹配准则。通过实际数据处理证明,新控制三角形匹配识别算法实现恒星CCD影像坐标和天球坐标转换匹配识别的可靠性抗干扰性稳健性。本算法具有旋转不变性,勿用考虑切平面坐标和影像坐标夹角,可以用以计算确定每一观测瞬间CCD北方向。根据数字天顶摄影仪CCD星象观测能力,选择Hipparcos、Tycho-2星表分别作为控制星匹配星表、参考星匹配星表来源星表。通过对Hipparcos、Tycho-2星表处理,分别编制了数字天顶摄影仪控制星和参考星匹配星表数据库。0.3 s内完成一幅3 073×2 048大小的CCD实测图像星象准确匹配识别。满足数字天顶摄影仪快速高精度测量垂线偏差的需要。
[1] 陈俊勇,李建成,宁津生,等. 中国似大地水准面[J]. 测绘学报,2002,31(sup):1-6.
[2] HIRT C. Automatic determination of vertical deflections in real-time by combining GPS and digital zenith camera for solving the GPS-height-problem [C]//Proc 14th International Technical Meeting of the Institute of Navigation, Alexandria, 2001:2540-2551.
[3] HIRT C, SEEBER G. Accuracy analysis of vertical deflection data observed with the Hannover digital zenith camera system TZK2-D[J]. J Geod, 2008(82):347-356.
[4] 郭金运, 宋来勇, 卢秀山, 等. 数字天顶摄像仪中CCD星象亚像素定位的改进二维矩方法[J]. 测绘学报, 2011, 40(6): 679-683.
[5] 郭金运, 宋来勇, 常晓涛,等. 数字天顶摄影仪确定垂线偏差及其精度分析[J]. 武汉大学学报·信息科学版, 2011, 36(9): 1085-1088.
[6] 赵 铭. 天体测量学导论[M], 北京: 中国科学技术出版社, 2006.
[7] UDOMKESMALEE S. Stochastic star identification [J].Journal of Guidance Control Dynamies, 1994, 17(6): 1283-1286.
[8] 李立宏. 一种改进的全天自主三角形星图识别算法[J].光学技术.2000, 26(4): 372-374.
[9] PADGETT C. Evaluation of star identification teehniques [J]. Journal of Guidance Control Dynamics, 1997,20(2): 259-267.
[10] CURTIS P K. A grid algorithm for autonomous star identification [J]. IEEE Transactions on Aerospace and Electronic Systems, 1997, 33(1): 202-213.
[11] LALITHA P, BRIAN G W, MAREO P S. Star pattern recognition for attitude determination using genetic algorithms presented at the 17th AIAA/USU conference on small satellites [M]. Logan:UT, 2003.
[12] 朱长征. 基于星敏感器的星模式识别算法及空间飞行器姿态确定技术研究[D]. 长沙:国防科技大学, 2004.
[13] 韩茂城, 阂桂荣. 星载恒星相机的作用、特点及其发展成就[J].航天返回与遥感, 1993, 14(4): 23-27.
[14] UDOMKESMALEE S. Stochastic star identification [J].Journal of Guidance Control Dynamies, 1994, 17(6): 1283-1286
