卫星导航相对定位技术研究
2014-08-21任小伟杨文辉
任小伟,熊 帅,杨文辉
(中国电子科技集团公司第二十研究所,陕西 西安710068)
0 引 言
在飞机和航母的编队出行、飞行器空中交会对接、无人机协同探测、多平台协同作战等应用中,实现系统中各成员精确的时空统一是完成系统功能的基础,相对导航技术则是一种实现时空统一的重要途径。卫星导航相对定位技术是指利用两个平台上卫星导航接收机的测量数据计算两个天线之间的矢量,用于测量两个平台相对距离和方位。这种技术采用了差分的处理方法,也称为相对差分技术。本文对卫星导航相对定位技术进行了深入的研究,详细分析了载波相位和伪距单差与双差的形成,建立了双差算法模型以及相对定位解算模型,开发了卫星导航差分相对定位算法处理软件并利用卫星导航接收机搭建试验研究环境,开展了零基线、短基线的试验研究。
1 卫星导航差分处理方法
差分处理方法通过对不同平台的卫星导航测量值进行差分组合,消除或降低测量值中的公共误差部分,从而有效提高导航定位精度[1-3]。按照差分级数可以分为差分和双差。
1.1 单差差分
每个单差测量值涉及两个接收机在同一时刻对同一颗卫星的测量值,它是接收机之间对同一颗卫星测量值的一次差分。单差不但可以消除测量值中的卫星钟差,在短基线情况下,也可以基本消除大气延时误差[4]。

(1)
(2)
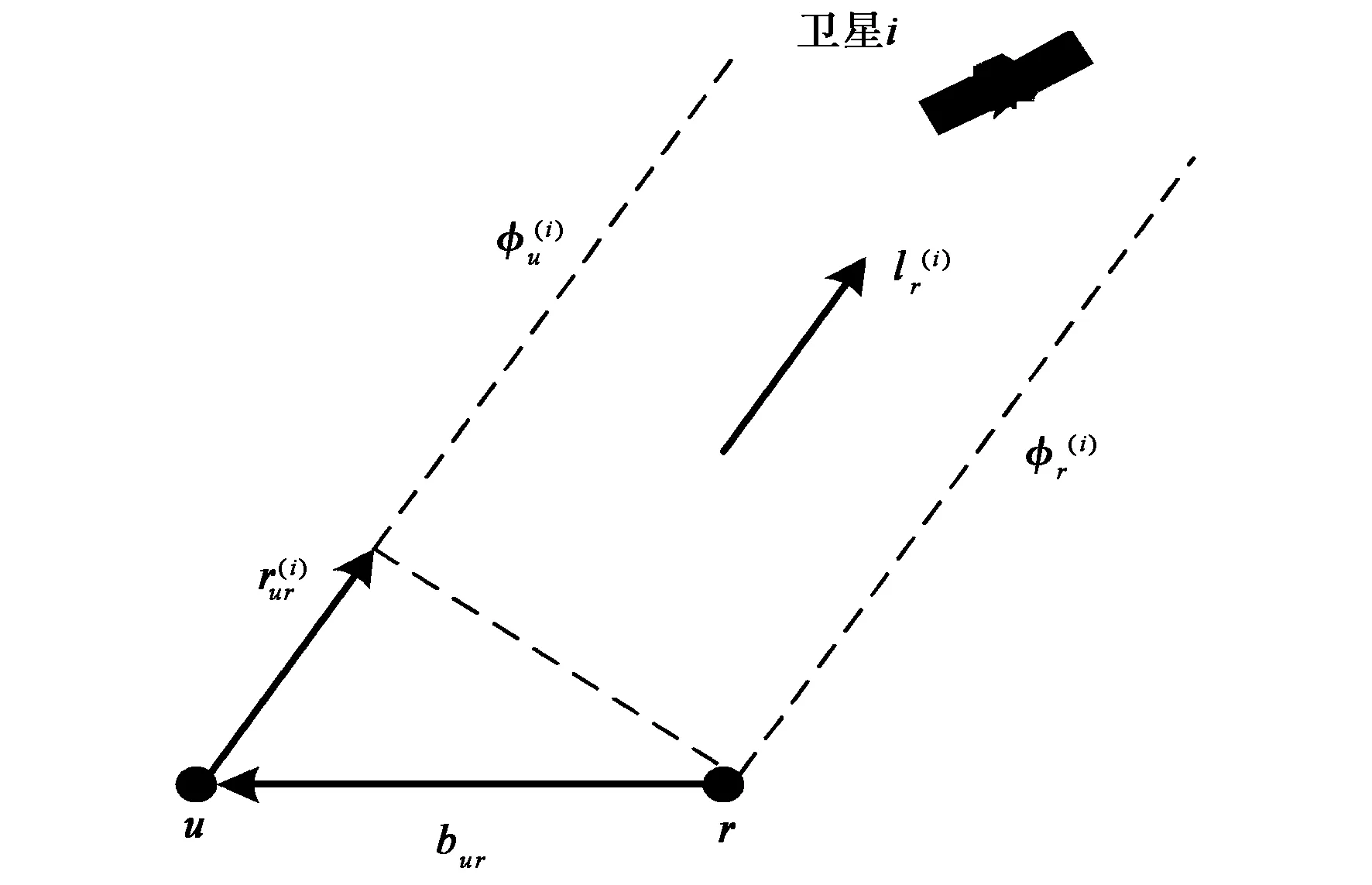
图1 单差形成示意图
其中:上标表示卫星编号;下标表示对应的接收机;f为载波频率;λ为波长;R为接收机与卫星的真实几何距离;I为电离层延时;T为对流层延时;δt为钟差;N为整周模糊度;ε为测量值噪声。

(3)
将式(1)和式(2)代入式(3),得
(4)
其中,下标为“ur”的各参量的定义与式(3)类似,即将两个接收机的对应参量做差。

(5)

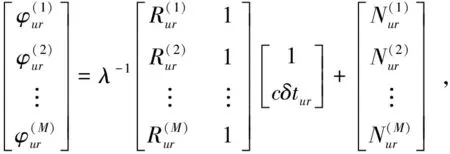
(6)

以上是形成单差载波相位矩阵观测方程式的过程,类似地,还可以将伪距组合成单差伪距测量值。接收机u和r对卫星i的伪距观测方程式如下:

(7)
(8)


(9)
1.2 双差差分
每个双差测量值涉及两个接收机在同一时刻对两颗卫星的测量值,它对两颗不同卫星的单差再进行一次差分,即在站间和星间各做一次差分。相比单差,双差能够进一步消除测量值中的接收机钟差。

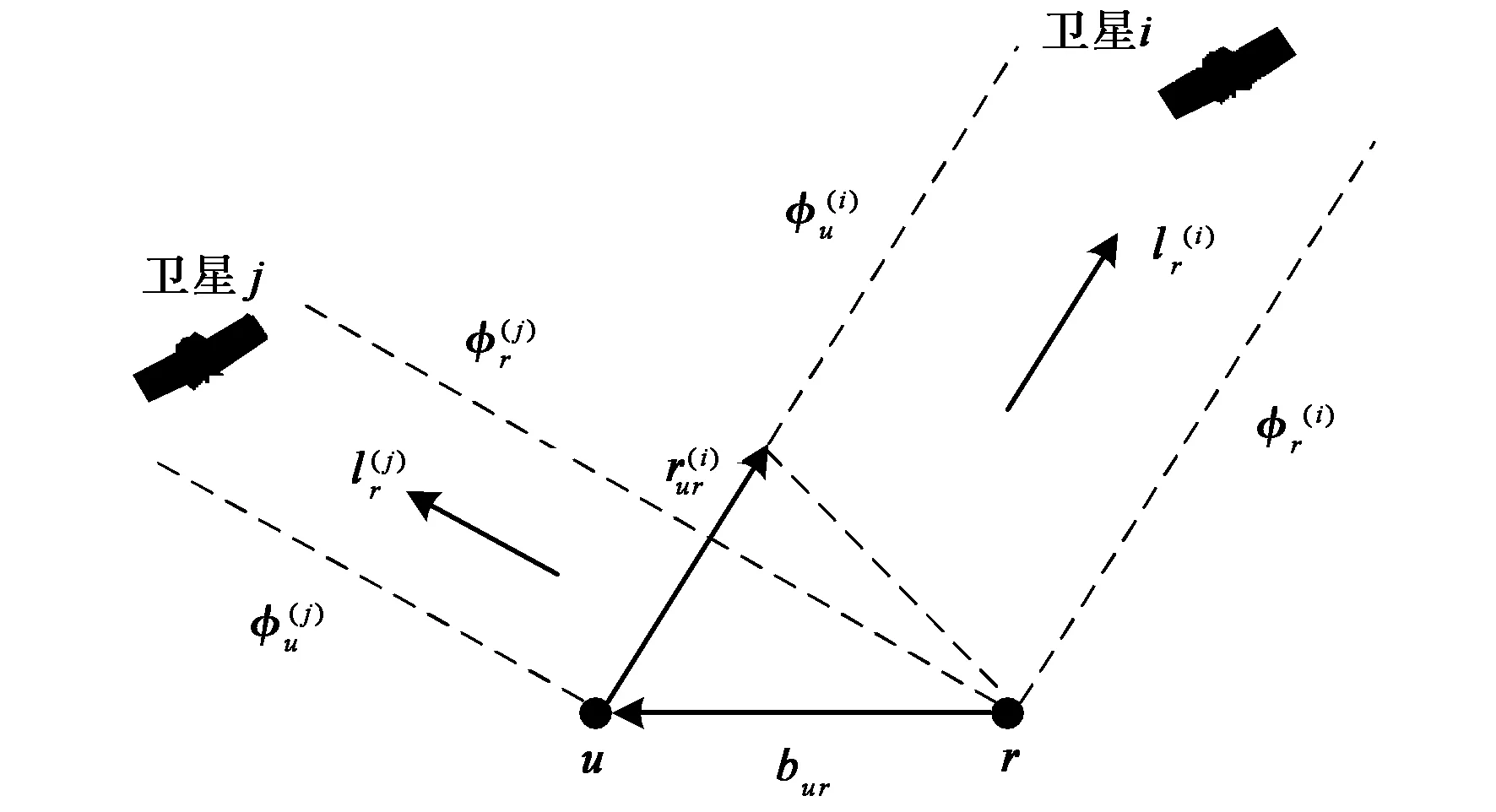
图2 双差形成示意图

(10)
(11)

(12)
其中,上标为“ij”的各参量的定义与式(11)类似,即将两个卫星的单差量再做差。由式(11)定义的双差是先求站间差、再求星间差,实际上,先求星间差、再求站间差得到的双差结果是一样的。式(12)表明,经过双差后,单差中剩余的接收机钟差δtur被彻底消除。

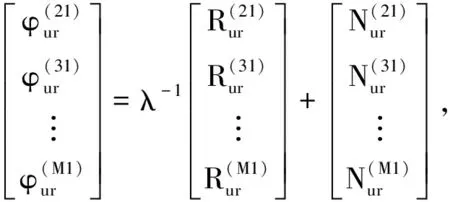
(13)


(14)
2 卫星导航相对定位方法
2.1 相对定位解算

(15)
其中,点号“.”代表向量内积运算。对于短基线系统,由于卫星距接收机的距离远远大于基线长度,因而在两个平台处的接收机对同一卫星的观测向量可以认为是相互平行的。当然,若基线很长,则观测向量不平行,上述公式就需要做相应修改。

(16)


(17)
将式(15)和式(17)代入式(12)得

(18)
2.2 相对速度解算
如图3,假设eui和eri分别表示为接收机u和r到卫星i的视线方向的单位矢量,Vu为接收机u的速度矢量,Vr为接收机r的速度矢量,Vi为卫星i的速度矢量。则接收机u和r的差分多普勒测量值为
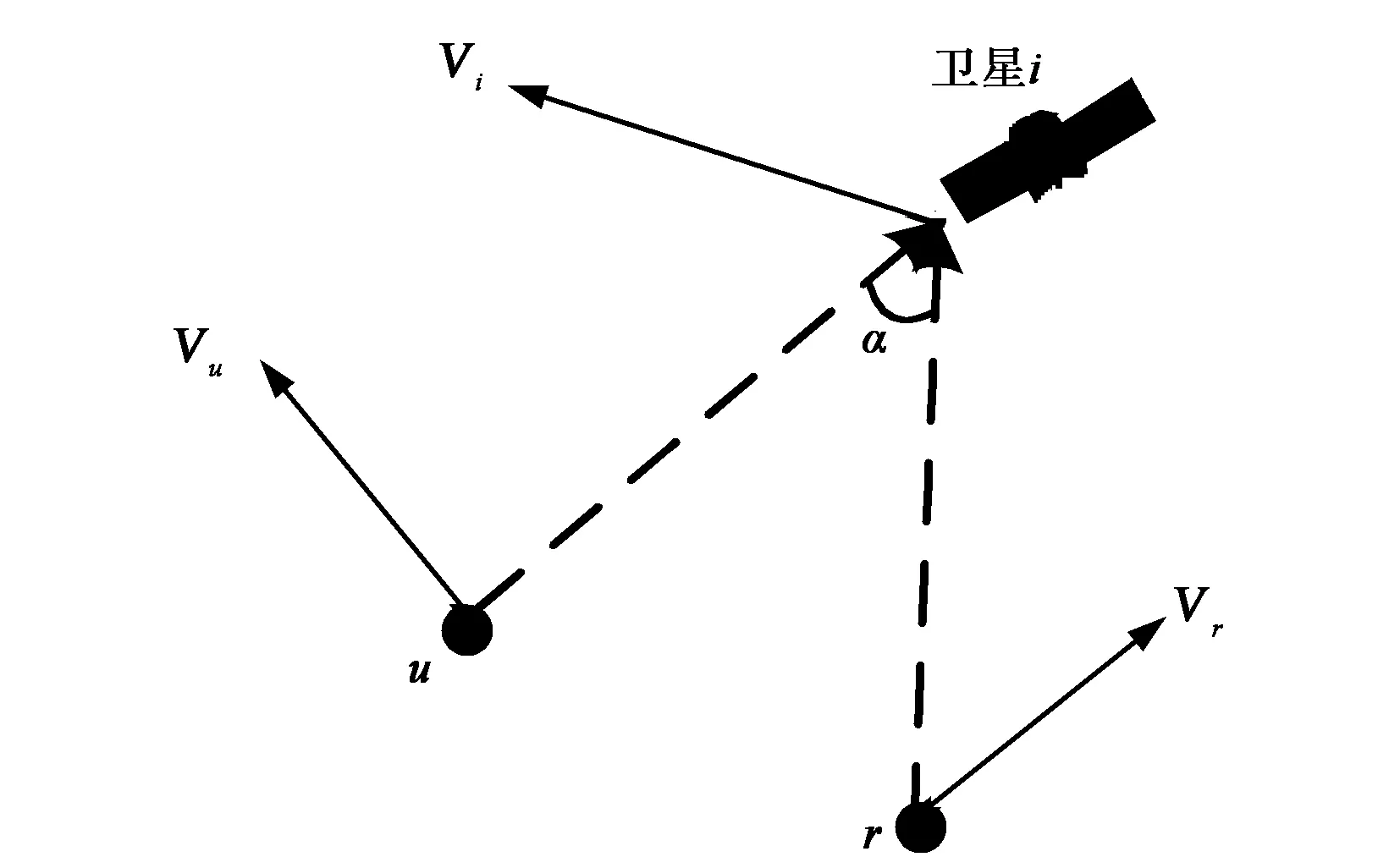
图3 相对速度解算示意图

(19)
虽然式(19)是线性的,但不是相对速度状态(Vur=Vr-Vu)的直接函数。用相对速度状态Vur将式(19)重写为
eui·(Vu-Vi)
=eri·(Vr-Vu)+(eri-eui)·(Vu-Vi)
=eri·Vur+(eri-eui)·(Vu-Vi).
(20)
3 相对导航定位试验
3.1 试验环境配置
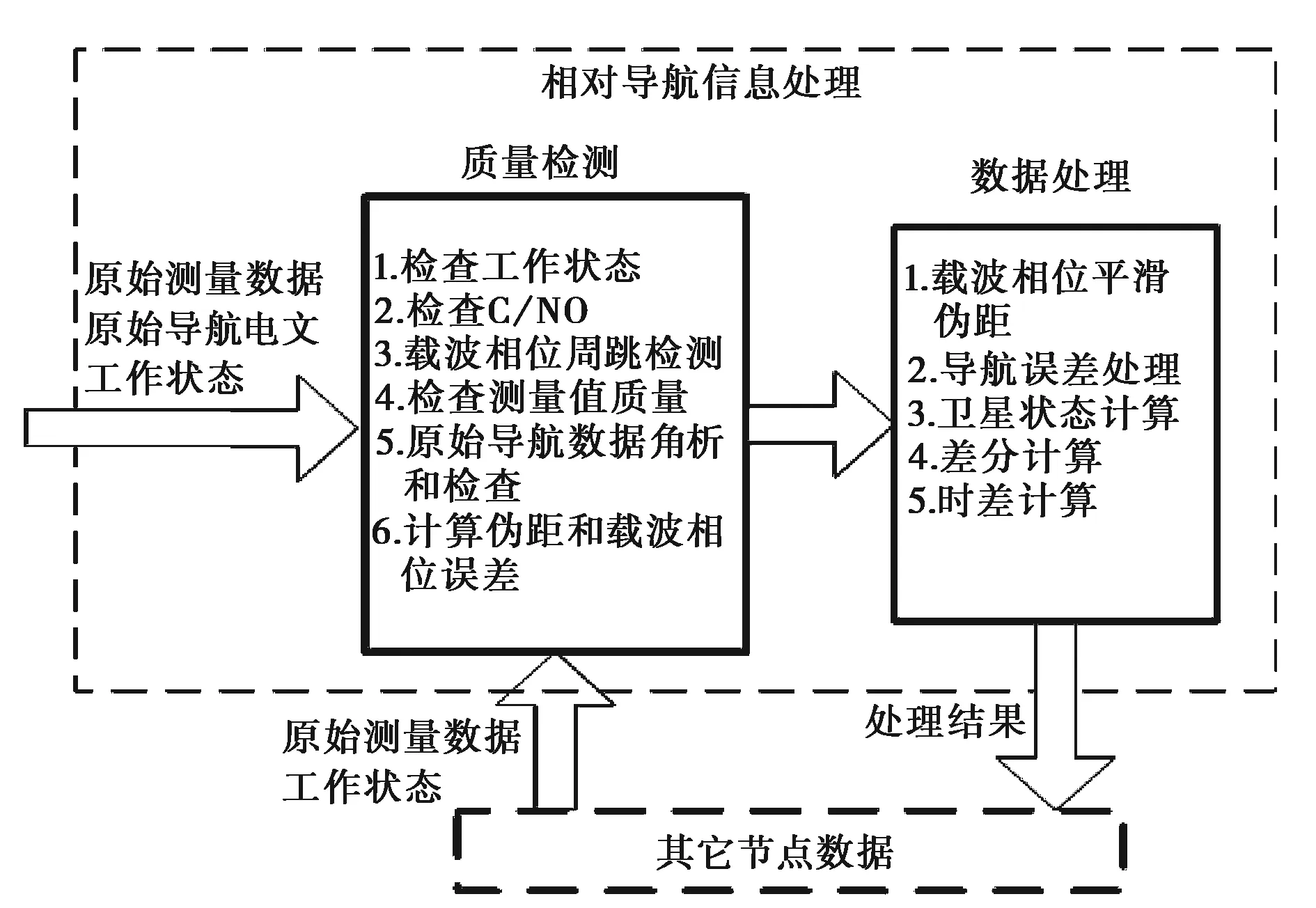
图4 卫星导航差分相对定位软件处理框图
图4示出了根据以上差分相对定位方法开发完成的卫星导航差分相对定位处理软件处理框图,可对GPS、BD2的多种数据类型进行相对定位处理和分析,下文进行的试验采用的均是双差伪距测量值的相对定位方法。图5示出了进行静态相对定位试验的处理过程。卫星导航接收机1和2架设在两处,其各自的天线位置通过长期统计进行标定。两接收机同时接收卫星数据并进行记录,然后用开发的卫星导航差分相对定位处理软件进行事后处理,计算两天线间的基线向量,并以标定的天线位置为真值对解得的基线向量的精度进行统计。
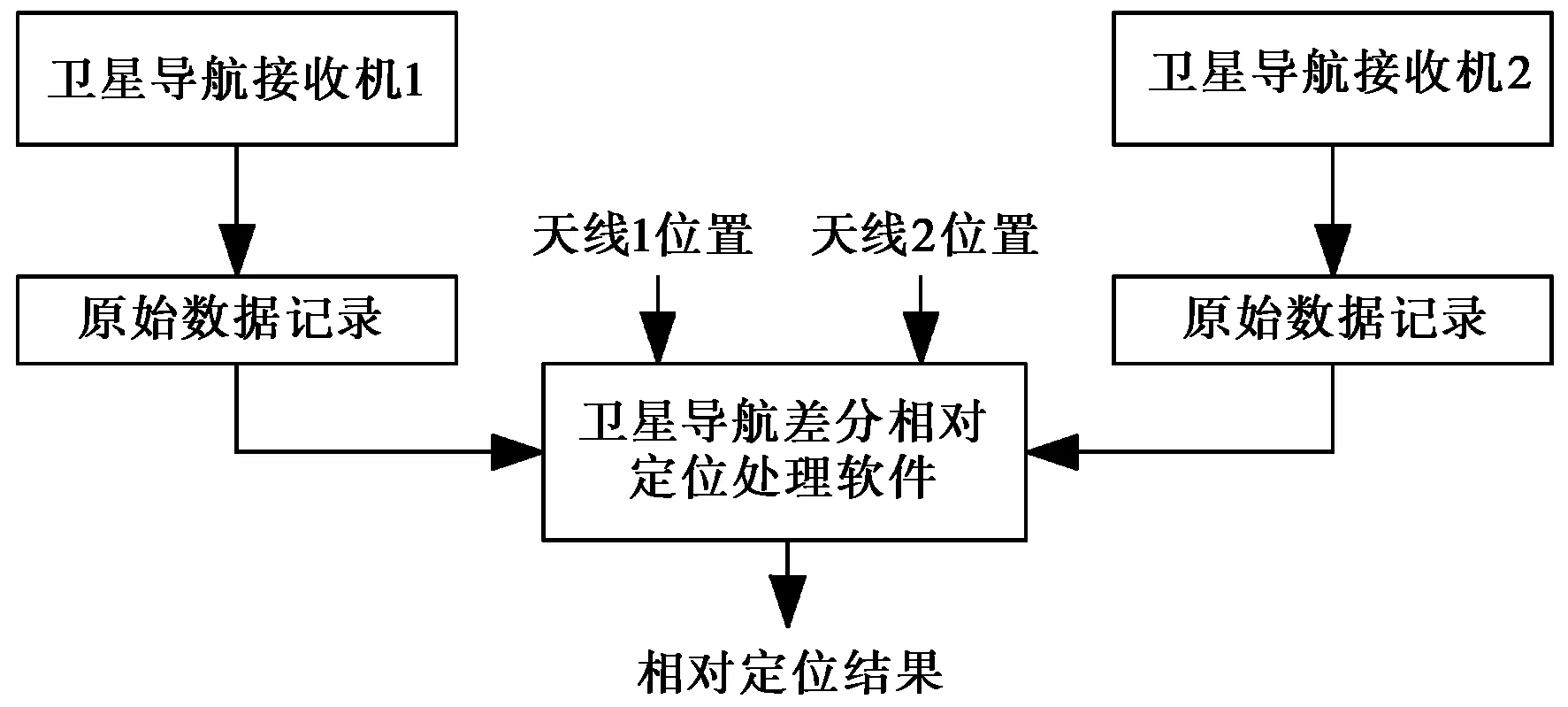
图5 相对定位试验处理过程框图
3.2 零基线试验结果
天线位置:一个接收机天线位于某大楼七层平台,一个接收机天线位于同大楼六层平台。基线长度非常短,故此处称为“零基线”,并非基线长度真的为零。
接收机采集BD2 B1、B2和B3频点的数据,并利用卫星导航差分相对定位处理软件分别进行事后差分相对定位处理统计。共处理统计了约20 h的数据,时间段为2013-2-19 3∶59∶57至2013-2-19 23∶59∶56.各个频点的差分相对定位的水平和高度定位误差结果如图6~8所示。

图7 B2频点差分相对定位水平误差和高度定位误差

图8 B3频点差分相对定位水平误差和高度定位误差
表1所示为三个频点水平和高度定位误差的统计结果。
3.3 短基线试验结果
天线位置:一个接收机天线位于某大楼七层平顶,一个接收机天线位于某试验场。基线长度为10.7 km,属于短基线情形。两接收机采集GPS L1频点数据,并利用卫星导航差分相对定位处理软件进行事后差分相对定位处理统计,结果如表2所示。其中5号卫星为处理时仰角最小的卫星,15号卫星为仰角最大的卫星。
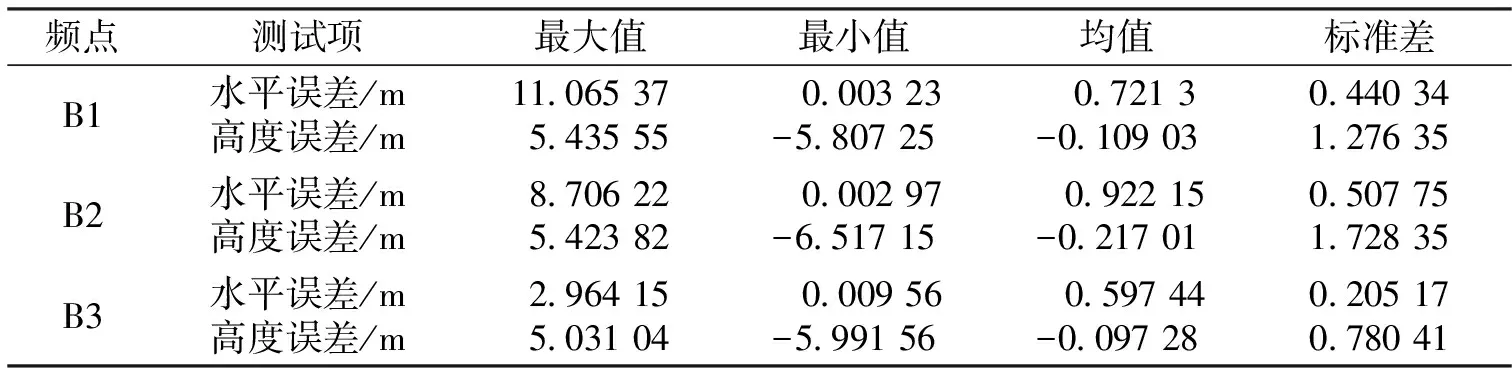
表1 零基线试验差分相对定位结果统计表
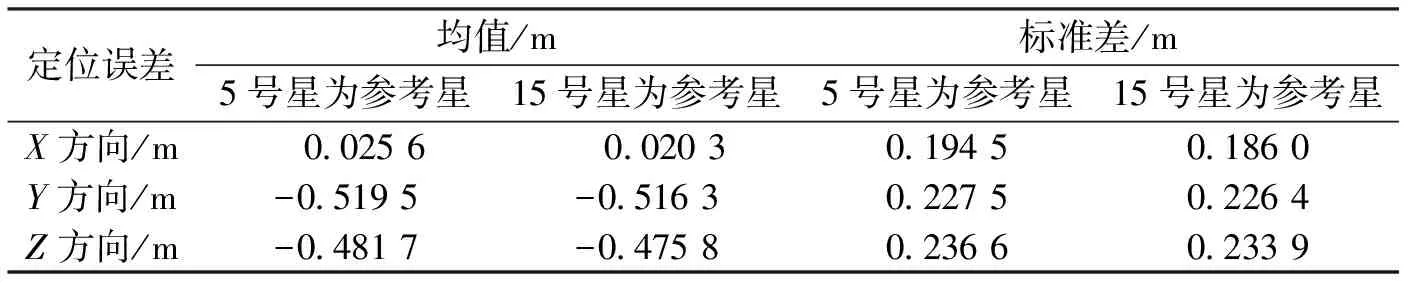
表2 短基线试验差分相对定位结果统计表
3.4 试验结果分析
总体来说,零基线和短基线相对定位试验结果表明,二者的水平和高度定位误差都在2 m以内,均达到了较高的精度。其中零基线相对定位统计结果处理的是BD2数据,短基线相对定位统计结果处理的是GPS数据,而所用接收机对GPS的测距精度要高于对BD2的测距精度,因此零基线的定位精度较短基线的略差。另外从短基线试验结果表2可以看到,以卫星仰角最大的15号卫星作为参考卫星时,定位精度要好于用卫星仰角最小的5号星作为参考卫星,这也符合前文对于双差处理算法中参考卫星选取的分析。
4 结束语
在协同作战领域,相对导航技术是实现高精度时空统一的重要途径。本文对基于载波相位和伪距的单差与双差相对导航方法进行了深入的研究和分析,建立了双差算法模型和相对定位解算模型,并以此为基础开发完成了差分相对定位处理软件。开展了零基线和短基线的静态相对定位试验,对BD2和GPS数据进行了事后差分相对定位处理。试验结果表明:采用双差伪距测量值的处理方法,能够获得小于2 m(1σ)的定位精度。进行的研究和试验具有一定的工程实用价值,后续将研究开展动态的相对定位试验。
[1]谢 钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[2]KAPLAN E,Understanding GPS:Principles and applications[M].2 ed.Artech House,Inc.,2006.
[3]PARK C,HOW J P.Precise relative navigation using augmented CDGPS[C]//Proceedings of the ION-GPS Conference,2001.
[4]MISRA P,ENGE P,Global Positioning System-Signals,measurements,and performance[M].Ganga-Jamuna Press,2001.
[5]CHAITIN-CHATELIN F,DALLAKYAN S,FRA-YSSE V,"GPS" carrier phase ambiguity resolution with the LAMDBA method:1.A stability analysis 2.An exponential speed-up[R].Toulouse:CERFACS,2000.
[6]TEUNISSEN P.GPS and integer estimation[J].Nieuw Archief Voor Wiskunde,2004,5(1):48-53.
