水下航行器舱室内废水处理及回用研究
2014-08-17赵健慧杨基先
黄 志,赵健慧,王 兵,杨基先,马 放
(1.哈尔滨工业大学 市政环境工程学院,哈尔滨150090;2.东北林业大学林学院哈尔滨150040)
水下航行器是一种用于水下勘探、侦测及军事进攻防守的水下航行载体.随着现在信息化作战技术的发展,水下航行器越来越得到了各个国家的重视[1-2].水下航行器舱室内是一个完全与外界大气隔绝的密闭环境[3-5],对于中长期运行的航行器,舱内航员大约为80名左右,因此航员取水用水将会是困扰其正常运行的一大难题.根据美国航天员每天的用水标准[6]:饮用水每人最低为2 kg,卫生用水每人最低为6 kg,总计每名宇航员每天要消耗8 kg水,那么这样卫生废水、尿液废水等的排放累积将会造成很大的负担.然而若在航行器舱室内建立废水处理及回用系统,可以最大限度的回收和再生排出的废水来补充用水量,这样不仅能够满足航员的用水需求,还可以降低航行器运行费用,提高经济综合效益.在我国,尚无人研究中长期航行的水下航行器舱室内的废水处理及再生系统.因此,本研究试图为水下航行器舱室设计建立废水处理及回用系统,使废水循环利用,以解决用水困难问题.
1 材料与方法
1.1 实验装置
本实验根据水下航行器航员排放的废水量建立的膜分离处理及回用系统主要由膜生物反应器、保安过滤器、超滤装置、高级氧化单元、活性炭过滤装置、反渗透装置等组成,该系统的具体流程见图1.
本试验膜生物反应器由有机玻璃制成,有效容积为525 L,温度控制在20~25℃之间.反应器所采用的膜为天津膜天技术公司生产的聚偏氟乙烯中空纤维微滤帘式膜组件,膜孔径为0.22 μm,中空纤维膜的内外径分别为0.5 mm和0.8 mm.整个装置共装有膜组件3只,每只膜组件的膜面积为2 m2,外形尺寸为 S=0.514 m × 0.336 m=0.173 m2.为避免污泥的淤积,每两只膜组件的安装间距为0.2 m,膜组件的安装总长度为0.2 ×2=0.4 m,所以,膜组件的填装体积为 V=0.173×0.4=0.069 m3.膜组件两端用一竖管接纤维丝的出水孔,形成一种平板状,然后将这种单片状膜构成一种矩形状膜组件,膜和集水管相连,通过抽吸作用出水.曝气装置的曝气量由空气流量计进行调节,控制在0.3 ~0.5 m3/L,从而保持溶解氧(DO)为 2 ~3 mg/L.
保安过滤器采用1支0.1 m长缠绕型聚丙烯滤芯,过滤精度为5 μm.
超滤膜组件采用1根内压式,外形尺寸为Φ50×480 mm,切割分子质量(MWCO)为30 000 u的国产中空纤维膜,材质为聚丙烯睛(PAN)膜,膜面积为2 m2.
高级氧化单元采用TiO2紫外光催化氧化法.
活性炭滤柱材质为有机玻璃圆柱:滤柱内径86 mm,高800 mm,活性炭层有效高度为300 mm,承托层石英砂高度为70 mm.
反渗透组件采用CTA三醋酸中空纤维膜,对反渗透进水水质的要求为:θ=25℃,pH值满足5~6,SDI15 <4,P 满足 2.5 ~3.0 MPa,浊度 <0.2 ntu,含铁量 <0.1 mg/L,游离氯在 0.2 ~1 mg/L 范围内.
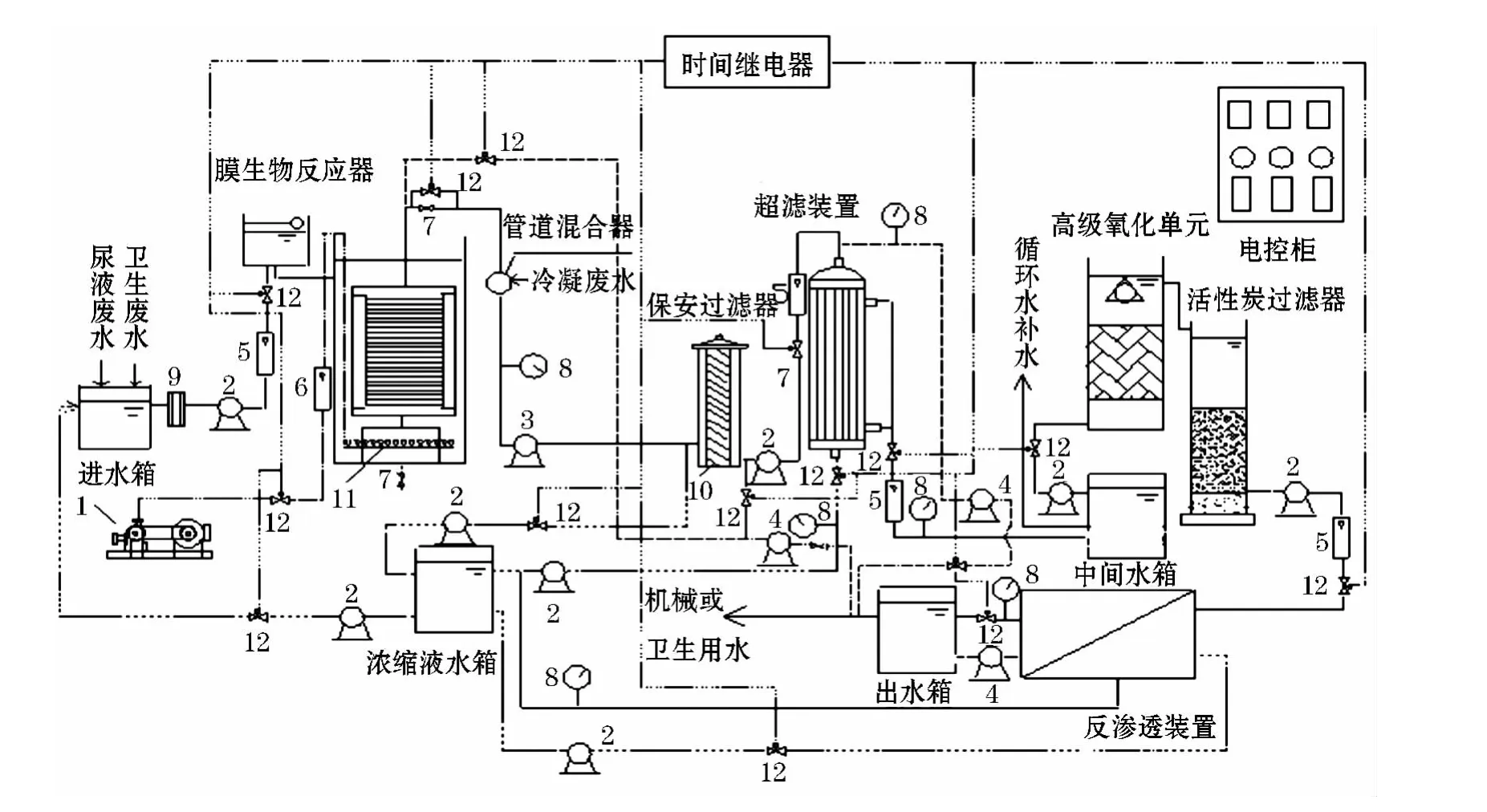
图1 水下航行器废水处理及回用系统流程图
1.2 实验废水
水下航行器舱室内收集的废水主要包括生理废水、卫生废水和冷凝废水.试验采用人工配制的水下航行器舱内混合废水,具体成分见表1.经水量按水下航行器舱室内载航员80名进行计算,各类废水的水量如下所示:生理废水200 L/d,卫生废水2 530 L/d,冷凝废水180 L/d.

表1 模拟废水水质
1.3 膜生物反应器污泥驯化
本试验中对活性污泥的培养采用了接种培养方式.先将接种池充满废水,停止进水后接种污泥,并进行闷曝气.经过1~2 d曝气后,反应器中出现模糊不清的絮凝体.为补充营养和排除菌群代谢产物,需及时换水.第1次加料曝气并出现模糊地絮凝体后,停止曝气,使混合液静沉,经1~1.5 h沉淀后采用虹吸的方法排除上清液(其体积约占总体积的50%~70%),然后再向曝气池内投加新的废水.每次换水,从停止曝气、沉淀到重新曝气,总时间不超过2 h.开始时每天换水1次,以后增加到2次,以及时补充营养.随时检测溶解氧(DO)、进出水pH值、固体悬浮物(MLSS)、污泥容积指数(SVI)、污泥沉降速率等指标以及使用显微镜观察微生物相的变化.成熟的污泥为黄褐色絮状,沉降性能良好.污泥培养成熟后将活性污泥接种进膜生物反应器.
1.4 分析方法
试验中主要的分析项目有:MLSS、化学需氧量(COD)、氨氮(NH3—N)、浊度和阴离子洗涤剂(LAS)等,均采用标准方法进行检测.分析项目的选择参照了《生活饮用水卫生规范》(2001)和《城市供水水质标准》(CJ/T206-2005、简称《规范》和《标准》).其中 COD、NH3—N、浊度及 LAS在这些标准中有明确的限值规定,分别为3 mg/L(特殊情况不超过 5 mg/L)、0.5 mg/L、1 ntu 和0.3 mg/L.
2 实验结果与讨论
2.1 系统对废水中有机物的去除效果
废水中的COD主要在膜生物反应器中被去除,在溶解氧存在条件下,有机物一部分用于微生物新陈代谢、自身增殖,另一部分被好氧微生物分解成CO2、H2O、NH3等无机物,并释放能量.经过8个月的连续运行,系统对废水COD的去除情况如图2所示.从图2中可以看出,试验期间,系统进水COD质量浓度在2 120~5 350 mg/L之间,平均质量浓度为3 735 mg/L,系统出水COD质量浓度低于2 mg/L,COD可以几乎完全被去除.
2.2 系统对废水中氨氮的去除效果
氨氮(NH3—N)是水体中的主要耗氧污染物,氨氮的去除主要是靠硝化和亚硝化作用实现的,若系统污泥龄不长、污泥质量浓度较低,则不适宜世代时间很长的硝化菌和亚硝化菌的代谢繁殖,这样氨氮去除效率不高[7-8].本试验 NH3—N 主要集中在尿液废水中,并因人体生理情况不同存在较大差异,卫生及冷凝废水NH3—N值较稳定,混合废水NH3—N 值在 79.5~129.3 mg/L之间变化,平均100.7 mg/L.
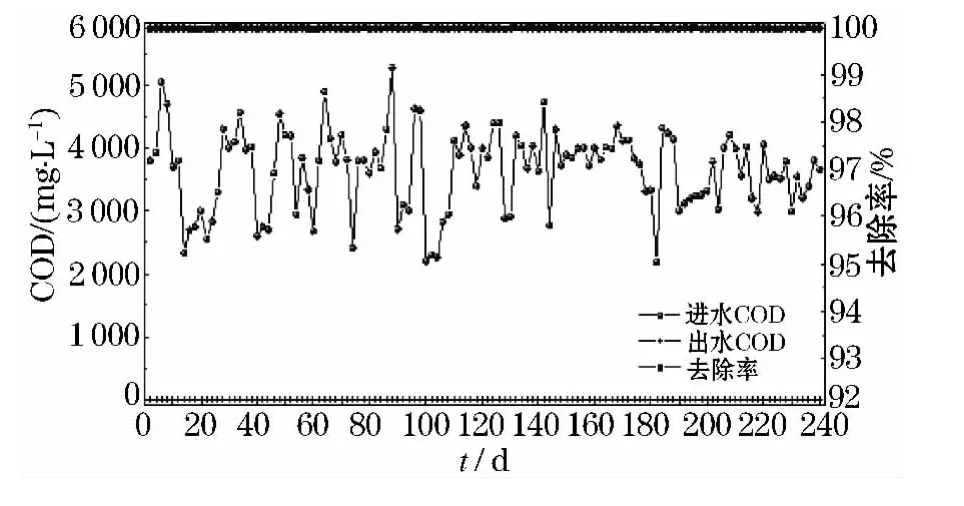
图2 系统对废水中NH3—N的去除情况
经过8个月的连续运行,系统对氨氮的去除情况如图3,由图3可以看出,试验期间,MBR单元进水氨氮质量浓度在79.5~129.3 mg/L之间,平均值为100.66 mg/L.NH3—N经系统处理后出水质量浓度低于0.3 mg/L,NH3—N几乎完全被去除,去除率为99.9%,表明该系统能够有效的去除废水中的氨氮.

图3 系统对废水中NH3—N的去除情况
2.3 系统对废水中浊度的去除效果
由于浊度间接代表了水中悬浮物和胶体物质的含量,降低浊度可在满足感官性状要求的同时部分降低有机物和有毒有害物质的含量,低浊度水使细菌、病毒失去保护而更容易在消毒过程中被杀灭,因此,浊度在历次水质标准的修订中都被列为出厂水的每日必检项目,在上述标准中更要求浊度的合格率必须达到95%.新修订的《生活饮用水卫生规范》(2001)和《城市供水水质标准》(CJ/T206-2005)常规检验项目中浊度有比较大的变动:由原来的3 ntu变为1 ntu.因此浊度作为废水回用指标也是十分必要的.
图4所示为系统对废水中浊度的去除效果.从图4中可以看出,系统进水浊度值在110.0~181.1 ntu之间浮动,平均值为147.0 ntu.检测结果显示,经系统处理后的出水浊度为0,浊度被完全去除.

图4 系统对废水中NH3—N的去除情况
2.4 系统对废水LAS的去除效果
阴离子洗涤剂(LAS)是考察回用废水是否达到标准的重要指标,水下航行器废水中阴离子洗涤剂主要存在于卫生废水中.目前国产合成洗涤剂主要成分以阴离子型烷基苯磺酸盐为主,还有一些其他增净剂、漂白粉、荧光增白剂、抗腐蚀剂、泡沫调节剂、酶等辅助成分.其具有慢性毒性但有持久作用,当水中质量浓度超过0.5 mg/L时,能使水产生泡沫和异味,并对人体的皮肤有损害.故我国新修订的《生活饮用水卫生规范》(2001)和《城市供水水质标准》(CJ/T206-2005)规定其质量浓度不超过0.3 mg/L.系统对废水中LAS的去除效果见图5.
从图5中可以看出,系统进水LAS质量浓度在4.9 ~5.4 mg/L 范围内,平均为 5.1 mg/L.经系统处理后出水检测不到LAS的存在,LAS去除率为100%.可见该系统对LAS有较高的去除率.
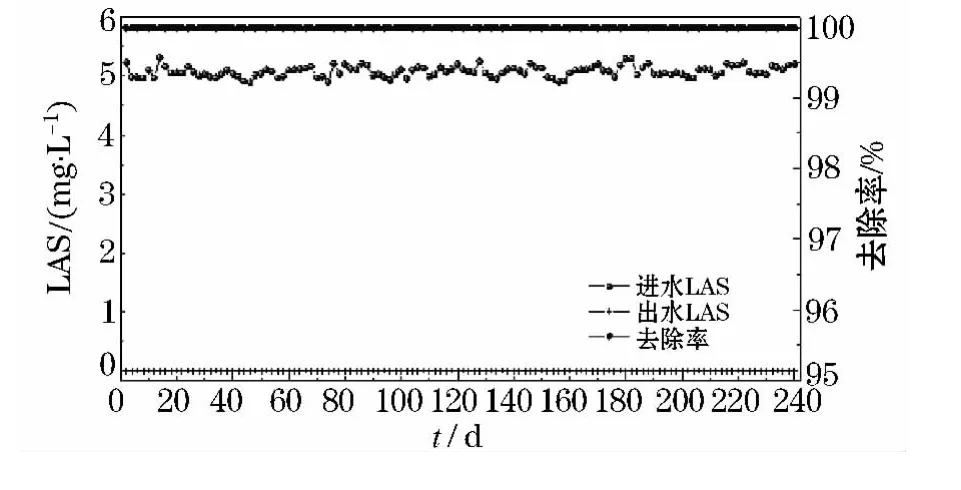
图5 系统对废水中LAS的去除情况
由以上分析可知,本文建立的废水处理及回用系统可以有效地处理水下航行器的混合废水,出水各项指标远远低于《生活饮用水卫生规范》和《城市供水水质标准》的要求,可以达到回用的目的.
3 结语
本实验建立的水下航行器废水膜分离处理及回用系统可以解决其用水取水困难问题,检测结果发现经系统处理后的出水水质完全达到回用标准,
废水中的COD和NH3—N的去除率可达99.9%,
浊度和LAS可被完全去除.这样该系统不仅可以减少废水的排放量,利于水下航行器作战隐蔽的要求,而且还可以减少启航时陆地供应的淡水量,降低航行器的运行负荷.
[1] LOK J J.Autonomous underwater vehicles technology plunges toward maturity[J].Jane’s International Defense Review,2005,38:44-47.
[2] JUAN P J,DECIO D,JULIO A.Experimental model identification of open-frame underwater vehicles[J].Ocean Engineering,2013,60:81 -94.
[3] CACCIA M,INDIVERI G,VERUGGIO G.Modeling and identification of open frame variable configuration unmanned underwater vehicles[J].Ocean Engineering,2000,25(2):227 -240.
[4] MOHAN S,THONDIYATH A.Power efficient dynamic station keeping control of a flat-fish type autonomous underwater vehicle through design modifications of thruster configuration[J].Ocean Engineering,2013,58:11-21.
[5] LUO J,TANG Z,PENG Y,et al.Anti-disturbance control for an underwater vehicle in shallow wavy water[J].Procedia Engineering,2011,15:915-921.
[6] LYGOURAS J N,LALAKOS K A,TSALIDES P G.THETIS:an underwater remotely operated vehicle for water pollution measurements[J].Microprocessors and Microsystems,1998,22(5):227-237.
[7] MARTINS A M,HEIJNEN M C.Bulking sludge in biological nutrient removal systems[J].Biotechnology and Bioengineering,2004,86:125-135.
[8] TSUNEDA S,OHNO T,SOEJUMA K,et al.Simultaneous nitrogen and phosphorus removal using denitrifying phosphate-accumulating organisms in a sequencing batch reactor[J].Biochemical Engineering Journal,2006,27(3):191 -196.
