在摆动相中用于下肢外骨骼跟踪人体踝关节轨迹的方法
2014-08-16路新亮韩亚丽王兴松
贾 山 路新亮 韩亚丽 王兴松
(1东南大学机械工程学院,南京 211189)
(2南京工程学院机械工程学院,南京 211167)
外骨骼是一种并联于使用者身体外侧的机械系统,广泛应用于助力、助残及康复训练领域.
如何获取人体的运动状态,并控制外骨骼良好地随动人体运动是外骨骼研究中的关键问题之一.例如,日本筑波大学的外骨骼HAL用具有超前性的肌电信号检测人体肌肉的运动意图[1-3],但信号特征因人而异,适用性较差.美国IHMC的RoboKnee通过检测足底力,映射为理想的膝关节扭矩,并进而对其SEA驱动器的推力进行控制,但是精度有限,最大误差达20%[4].美国加州大学伯克利分校的BLEEX通过人体上的倾角仪检测人体下肢各部分的角度,结合外骨骼上的关节编码器信号求得虚拟人机接触力,并根据经过优化的预设步态数据,得出外骨骼关节所需扭矩,该方法依赖于外骨骼动力学模型的精度[5-7].华东理工大学的“阿力”根据足底力判断步态阶段,依据预设的步态状态机确定关节扭矩的前馈值,同时人机相互作用力的检测用于扭矩控制的反馈环[8-10].上海交通大学的康复训练外骨骼检测肌电与外骨骼关节角度信号,通过模糊规则及标准步态数据库对外骨骼的关节角度与角速度进行控制[11-12].
在人体上佩戴肌电电极等各类传感器或者预设标准步态数据库等都会增加系统的复杂性,如文献[6]认为在人体上穿戴倾角仪存在可靠性与安全性的问题.
上述各方法在对处于摆动相的外骨骼腿进行控制时显得较为复杂,因为处于摆动相的外骨骼腿不承担负载,其控制要求是良好地跟踪人体的运动轨迹.为此,本文介绍一种基于踝关节处人机位姿误差对外骨骼髋、膝关节进行角度、角速度的控制以减小误差的方法,采用卡尔曼滤波预测消除滞后性.该方法无需在人体上佩戴任何传感器,且对穿戴后的人机关节位置对应精度不作要求.
1 外骨骼机构及其状态检测
东南大学动力辅助外骨骼机构(SEU powerassistant exoskeleton,SPAEX)由背板、腰板、髋关节、大腿杆、膝关节、膝关节弹簧、小腿杆、踝关节、足部等部分组成(见图1),采用由套索传动的液压驱动方式.其中背板宽度与大、小腿杆的长度可调,以适应不同体型的使用者.
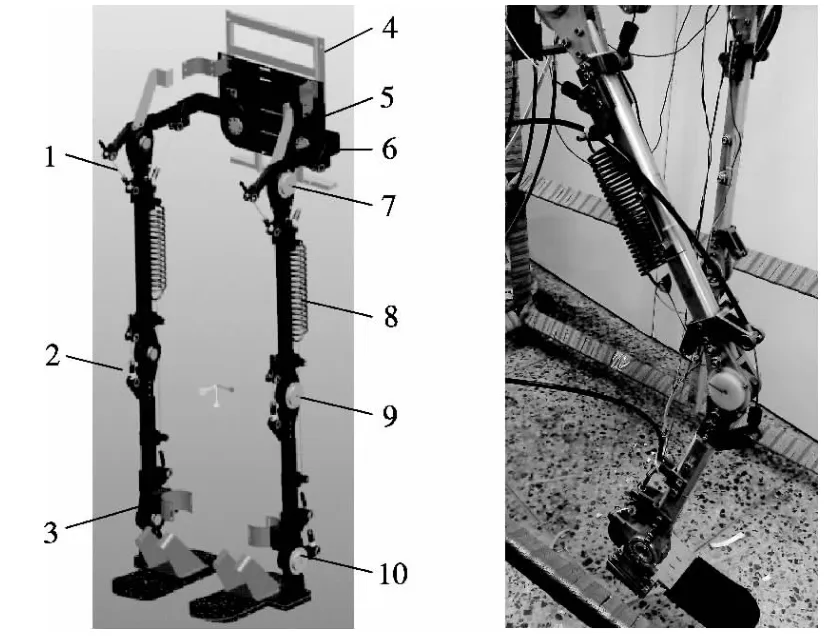
图1 SPAEX总体结构及样机
SPAEX通过检测踝关节处的人机位姿误差实现对其髋、膝关节位置的控制.控制中通过图2(a)所示的电位器实时获知外骨骼各关节的角度、角速度等运动状态.为了测得使用者与外骨骼之间的人机位姿误差,外骨骼在末端(即踝关节处)设置用于检测该位置人机踝关节偏距的人机位姿误差传感器,如图2(b)所示.
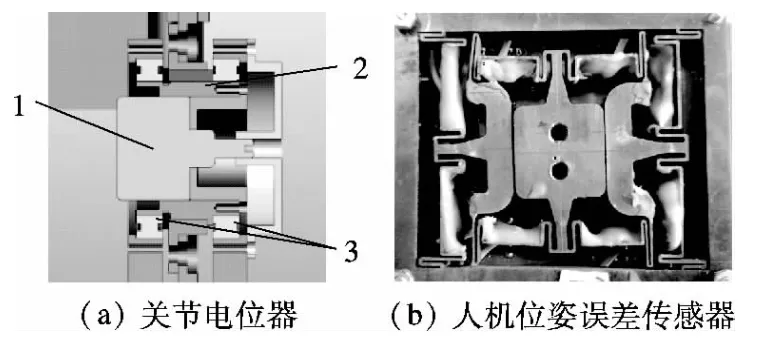
图2 外骨骼状态与人机位姿误差的检测方式
2 外骨骼运动学逆解及人体运动分析
步态特征因人而异,为减少外骨骼对人体运动的限制,SPAEX仅在腰部与踝关节处与人体绑定,即人机之间在髋、踝关节处保持相对固定的位置关系,膝关节处相对自由.因此,在摆动相中SPAEX对人体下肢运动的随动不是要求各关节角度轨迹的跟随,而是要求处于末端的人机踝关节运动轨迹的跟随.
在髋关节处建立基础坐标系XOY的外骨骼摆动腿运动学模型,如图3(a)所示,图中,髋、膝关节角度均为正方向.与实际使用时相同,模型中无须考虑各关节处的人机位置对应精度.图3(b)为反映人机摆动腿运动不一致性的踝关节处人机位姿误差模型.
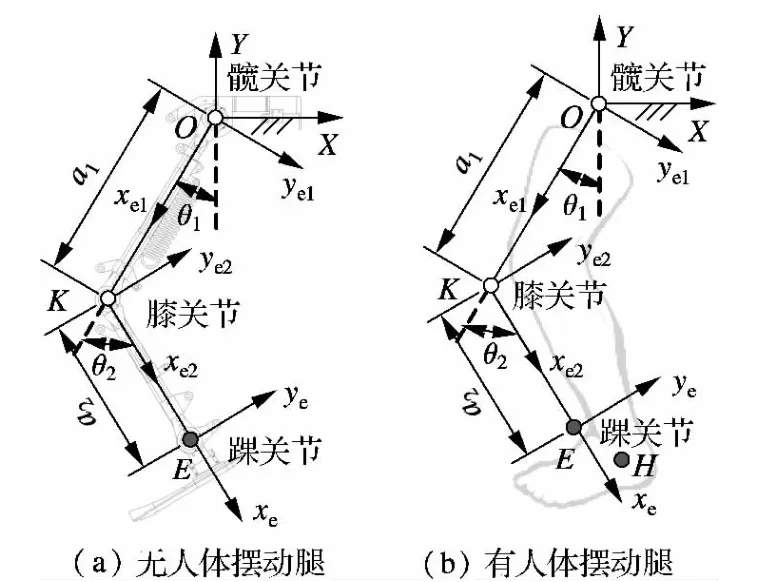
图3 外骨骼摆动腿模型
SPAEX踝关节(即人机位姿误差传感器E所在处)坐标系xeEye至其髋关节基础坐标系XOY的D-H变换为

则SPAEX踝关节处人机位姿误差传感器E在其髋关节基础坐标系XOY中的坐标为

踝关节处人机位姿误差定义(即传感器所测得的量)如图4所示.

图4 人机位姿误差在外骨骼踝关节处的表示
希望SPAEX踝关节能良好地随人体踝关节H运动,因此根据人机位姿位移误差Δ与角度误差θΔ,可得到SPAEX踝关节在其髋关节基础坐标系中的期望坐标A,B为
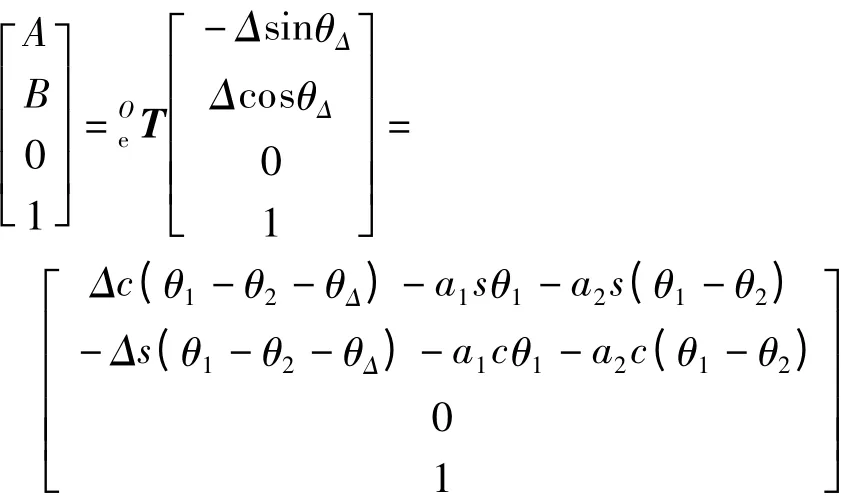
根据该期望坐标A,B对SPAEX髋、膝关节角度θ1,θ2进行运动学逆解,过程如下:
①设θ'1,θ'2是当前逆解得到的SPAEX的新关节角度值,则有

式(2)中有

可得

从而有

②将式(3)代入式(2),可得

式(4)中

设

则由式(4)可得
从而有

③对式(3)和(5)进行修正,使其满足θ'1∈,即符合外骨骼关节角度范围.
为了获得SPAEX踝关节在仿真中所对应跟踪的人体踝关节H的轨迹,并依据该轨迹求取仿真中的SPAEX踝关节处人机位姿误差,在自行开发的人体步态测量台(见图5(a))上进行了行走实验.根据GB10000—1988中以实验结果能够覆盖90%的中国成年人为依据,邀请了7名健康年轻男性实验者,年龄为(25±2)周岁,体重为(62.5±7.5)kg,身高为(170±5)cm,每人分别进行2次步态数据采集,求均值后进行运动学分析.实验中采用Helen Hayes法[13]在人体上设置标记点(见图5(b)),上位机通过图像采集系统对标记点进行坐标追踪并计算出实验者下肢各关节的运动学数据,算法详见文献[14].
由图5(c)可见,人体大、小腿的长度在步态周期中是变化的(由标记点坐标计算而得),其主要原因是人体下肢各关节的球窝-滑车特性,该特性直接导致人体踝关节与SPAEX踝关节在同一髋关节基础坐标系中的明显轨迹偏差(见图6(a)),其中SPAEX踝关节相对于其髋关节的运动轨迹是根据式(1)代入实验所得人体大、小腿长的均值(a1=0.375 4 m,a2=0.387 7 m)和人体髋、膝关节角度轨迹求得.
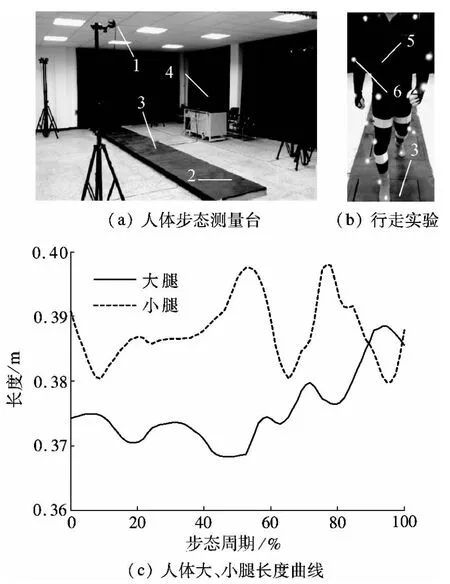
图5 人体步态测量实验与人体大小腿长度变化
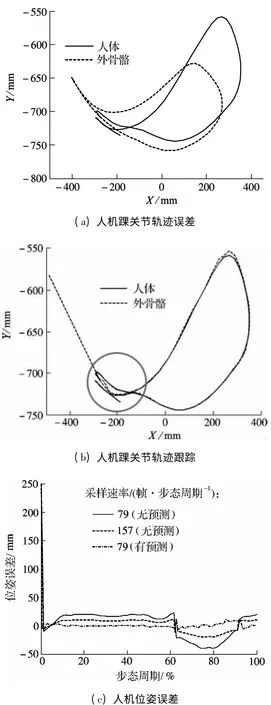
图6 人机踝关节轨迹与踝关节人机立姿误差
由于在SPAEX的实际使用中无须检测人体运动数据,因此在仿真中使用的人体踝关节H相对于其髋关节的运动轨迹数据仅用于计算SPAEX踝关节处的人机位姿误差,如图4所示.将通过实验获得的人体踝关节H在髋关节基础坐标系XOY中的坐标(xh,yh)转化到SPAEX踝关节坐标系xeE ye中,xeE ye坐标(xH,yH)为

式中,s表示sin;c表示cos.进而得到仿真所需的SPAEX踝关节处人机位姿误差为

3 基于运动学逆解的仿真
在实际的行走步态中,一条腿的摆动相约占40%左右.为了在更大的范围内检验本方法,仿真中使用了整个步态周期的关节运动数据,可视为悬吊在空中的行走动作.
由图5(c)所示实验数据可知,实验者平地直立时,大、小腿长分别约为0.373,0.387 m;实验中开始采集数据时的髋关节初始角度约为31.8°、膝关节初始角度约为1.4°.设SPAEX的大腿长a1=0.40 m、小腿长a2=0.36 m,即膝关节处均存在明显的人机位置穿戴误差;设外骨骼髋关节初始角度θ*1=40°、膝关节初始角度θ*2=0°,即存在明显的初始时刻人机位姿误差.
仿真流程如图7所示.仿真结果如图6(c)中实线所示.可见SPAEX踝关节能够随动人体踝关节,但存在明显滞后,这使得人机位姿误差最大达到约30 mm.这是因为依据k时刻的人机位姿误差通过运动学逆解而得到的外骨骼关节位置刷新值只能在k+1时刻实现,而仿真实验数据的采样速率为79帧/步态周期.图6(c)中虚线为将实验数据通过差分翻倍(即157帧/步态周期)后的仿真结果,可见最大误差缩小到15 mm以内.说明可以通过提高控制系统的采样速率改善控制精度.
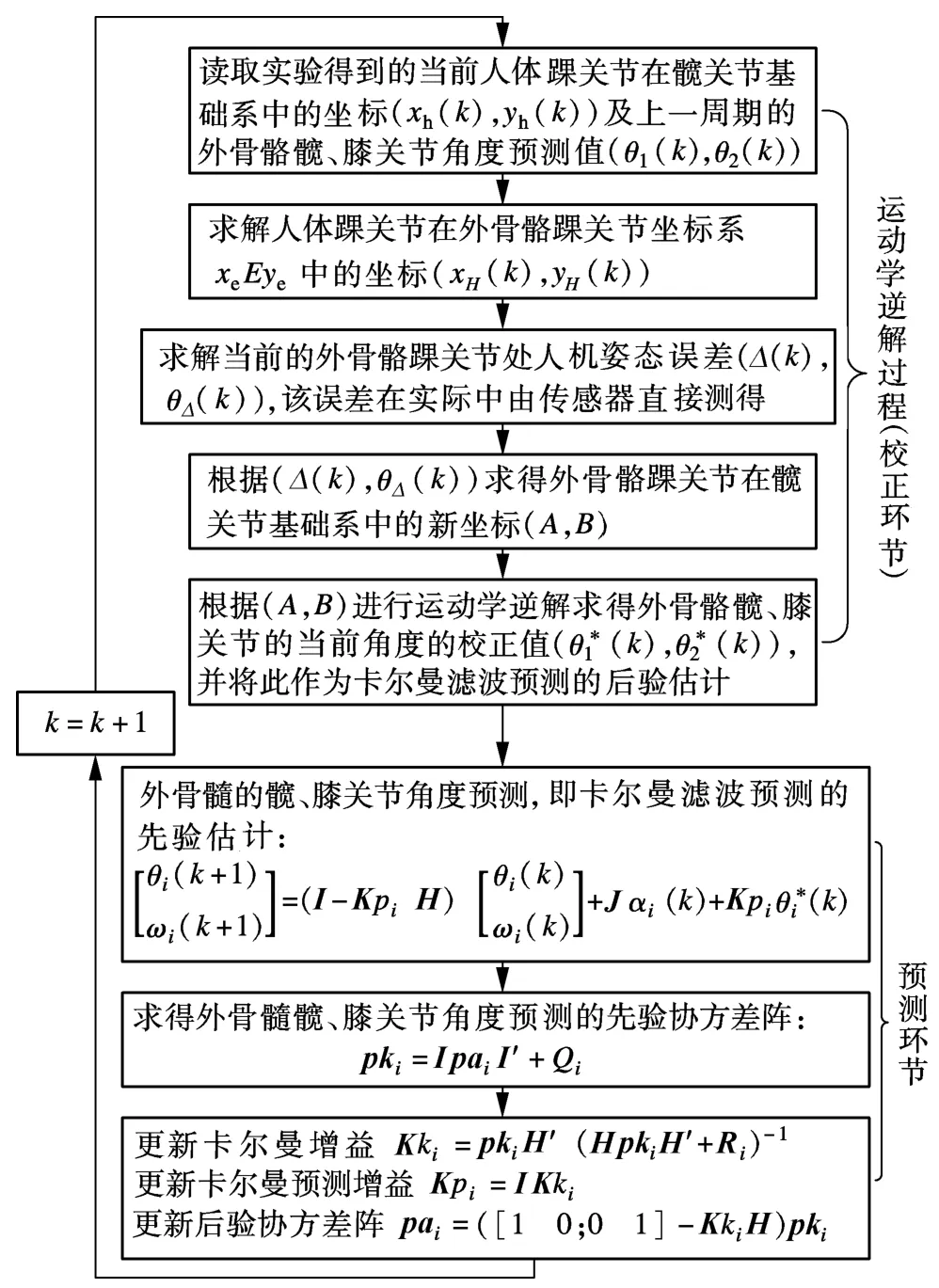
图7 含卡尔曼滤波预测的仿真流程
为了在有限的采样速率(即有限的硬件成本)条件下提高控制精度,本文引入卡尔曼滤波预测算法对SPAEX的关节位置控制进行改进.
4 基于运动学逆解与卡尔曼滤波预测的仿真
采用卡尔曼滤波器估计过程的状态,并使得估计均方差最小.外骨骼关节角度θi、角速度ωi的离散差分状态方程为
式中,i=1,2分别对应髋、膝关节;Δt为采样周期;αi(k)为第k采样时刻的关节角加速度.
以关节角度θi为观测变量,观测方程为


其中,外骨骼关节角加速度αi(k)可通过所测角度差分求得,定义为过程噪声.过程噪声和与由信号检测误差导致的观测噪声vt均为正态分布且相互独立的白噪声,设其对应的协方差阵Qi=0.1,Ri=0.1.
由图6(b)可见,采用采样速率79帧/步态周期的数据预测得到的SPAEX踝关节轨迹能良好地跟踪人体踝关节的运动,与图6(a)所示的仅保证下肢各关节角度轨迹跟随人机踝关节轨迹差异相比,具有明显的改善;由图6(c)中点划线可知,预测得出的踝关节处人机位姿误差迅速收敛并保持在3 mm以内,具有良好的精度.
由图6(c)可见,在步态周期85%~95%阶段踝关节处人机位姿误差出现小幅震荡现象,分析其产生原因为:由于人体髋、膝关节的球窝-滑车特性导致了人体踝关节在该阶段存在相对于其髋关节的运动方向和速度的快速变化(见图6(b)圆圈阶段),仿真中SPAEX踝关节在该阶段又严格跟踪了人体踝关节的轨迹.
在SPAEX的实际使用中,由于其踝关节处人机位姿误差传感器与人体之间的绑缚机构以及人体皮肤肌肉组织的柔性等,使得SPAEX踝关节在该阶段不会出现相对于其髋关节运动状态的剧烈变化,因此图6(c)中所示的小幅震荡现象对外骨骼髋、膝关节角度预测和实际使用的影响不大.
含卡尔曼滤波预测的仿真流程如图7所示.
5 结语
本文提出了一种基于踝关节处人机位姿误差和卡尔曼滤波预测的外骨骼踝关节对人体踝关节的轨迹跟踪方法.仿真中使用人体步态测量实验获得的人体踝关节相对于其髋关节的轨迹数据,通过人机运动学模型逆解计算外骨骼踝关节处的人机位姿误差,并由此对外骨骼髋、膝关节角度进行预测.仿真结果表明,引入卡尔曼滤波预测在不提高系统采样频率的情况下有效改善了运动学模型逆解算法在人机踝关节轨迹跟踪方面的滞后性,并使得外骨骼踝关节处人机位姿误差迅速收敛.同时,用本文所述方法设计外骨骼摆动腿控制系统无需在人体上佩戴任何传感器,也无需保证穿戴时的人机关节位置对应精度,具有较好的便利性.
References)
[1]Sakurai T,Sankai Y.Development of motion instruction system with interactive robot suit HAL[C]//Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics.Guilin,China,2009:1141-1147.
[2]Kawabata T,Satoh H,Sankai Y.Working posture control of robot suit HAL for reducing structural stress[C]//Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics.Guilin,China,2009:2013-2018.
[3]Kawamoto H,Taal S,Niniss H,et al.Voluntary motion support control of robot suit HAL triggered by bioelectrical signal for hemiplegia[C]//32nd Annual International Conference of the IEEE EMBS.Buenos Aires,Argentina,2010:462-466.
[4]Pratt J E,Krupp B T,Morse C J,et al.The RoboKnee:an exoskeleton for enhancing strength and endurance during walking[C]//International Conference on Robotics and Automation.New Orleans,USA,2004:2430-2435.
[5]Kazerooni H,Racine J L,Huang Lihua,et al.On the control of the Berkeley lower extremity exoskeleton[C]//International Conference on Robotics and Automation.Barcelona,Spain,2005:4353-4360.
[6]Kazerooni H,Steger R,Huang Lihua.Hybrid control of the Berkeley lower extremity exoskeleton(BLEEX)[J].The International Journal of Robotics Research,2006,25(5/6):561-573.
[7]Steger R,Kim S H,Kazerooni H.Control scheme and networked control architecture for the Berkeley lower extremity exoskeleton[C]//International Conference on Robotics and Automation.Orlando,USA,2006:3469-3476.
[8]Cao Heng,Ling Zhengyang,Zhu Jun,et al.Design frame of a leg exoskeleton for load-carrying augmentation[C]//Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics.Guilin,China,2009:426-431.
[9]曹恒,孟宪伟,凌正阳,等.两足外骨骼机器人足底压力测量系统[J].传感技术学报,2010,23(3):326-330.
Cao Heng,Meng Xianwei,Ling Zhengyang,et al.Measurement system for plantar pressure of biped exoskeleton robot[J].Chinese Journal of Sensors and Actuators,2010,23(3):326-330.(in Chinese)
[10]王瑜,曹恒,凌正阳,等.基于人机系统运动仿真的数字人步态规划方法[J].华东理工大学学报,2010,36(3):447-451.
Wang Yu,Cao Heng,Ling Zhengyang,et al.Gait planning methods of numerical man based on dynamic simulation of man-machine system[J].Journal of East China University of Science and Technology:Natural Science Edition,2010,36(3):447-451.(in Chinese)
[11]印松,殷跃红.下肢康复用并联式外骨骼膝关节的设计[J].高技术通讯,2009,19(8):839-843.
Yin Song,Yin Yuehong.Design of an exoskeleton knee based on parallel mechanism for lower limb rehabilitation[J].Chinese High Technology Letters,2009,19(8):839-843.(in Chinese)
[12]尤跃东,殷跃红.下肢外骨骼机器人运动学分析与轨迹控制实现[J].机械与电子,2012(3):65-69.
You Yuedong,Yin Yuehong.Kinematics analysis and trajectory control realization of lower extremity exoskeleton robot[J].Machinery&Electronics,2012(3):65-69.(in Chinese)
[13]Vaughan C L,Davis B L,O'Connor J C.Dynamics of human gait[M].2nd ed.Cape Town,South Africa:Kiboho Publishers,1999:16-20.
[14]Han Yali,Wang Xingsong,Fu Chunqian,et al.The study on human walking gait analysis system for the design of walking power-assisted robot[C]//Proceedings of the 2009 IEEE International Conference on Mechatronics and Automation.Changchun,China,2009:3607-3612.
