基于模糊PID卡尔曼滤波的多传感信息融合移动机器人定位研究
2014-08-14徐爱亲
徐 爱 亲
(丽水职业技术学院 机电信息分院, 浙江 丽水 323000)
0 前言
自主式地面移动平台AGV作为智能机器人的典型代表,是电子技术、控制技术、信息技术高度融合的产物,尤其在工业控制领域,伴随自动化技术的快速发展,AGV已逐渐应用于自动化立体仓库和柔性自动化生产线中。与传统的工业传送带相比,AGV具有较好的移动性和柔性,并且施工简单、路径灵活,随着在生产中对AGV需求的快速增长,其控制准确性也面临更高要求。专家和学者对精确定位问题进行了大量的研究,解决移动机器人定位问题对于提高机器人自动化水平具有重要的理论意义和实用价值。
机器人首先需要借助自身传感器获取周围环境的信息,然后通过定位算法融合传感器数据,得到机器人的位置信息[1]。文献[2]指出最早的贝叶斯方法需要知道先验概率,只适用于小样本事件。在贝叶斯方法的基础上Dempster和Shafter提出了D-S证据理论的不确定性推理方法,克服了贝叶斯方法的缺点,但该方法要求各证据间要相互独立,限制了应用范围[3]。
卡尔曼滤波算法则可以消除多传感信息的噪音,利用迭代推理,适合于存储空间和计算速度受限场合[4]。但是,当卡尔曼滤波模型不准确时,卡尔曼滤波器得到的信息序列随之增大,不再是白噪声序列[5]。基于此加入模糊控制规则,信息序列作为判断卡尔曼滤波器工作失常导致系统发散的依据,设计增量式模糊自适应PID控制器,改善滤波噪声方差,对融合信息进行限制,从而提高控制精度。
1 卡尔曼滤波器设计
1960年,R E Kalman发表了题为《一种线性滤波的新方法与预测问题》的论文,文中提出了卡尔曼滤波算法,卡尔曼滤波器系统框图如图1所示[4]。从含有噪声的测量值中得到系统状态的一次最优估计,经卡尔曼滤波器状态更新的信息都由前一次估计和新引入的数据计算产生,引入的数据要尽量减少噪声影响,这种估计方法在速度和加速度状态的估计中效果明显。

图1 系统结构框图
1.1 卡尔曼滤波算法
卡尔曼滤波算法利用反馈控制来实现过程估计,先估计出某个时刻的系统状态,然后得到观测值(有噪声)的反馈[6]。卡尔曼滤波方程列于式(1)和式(2):
卡尔曼滤波状态更新:
(1)
卡尔曼滤波测量更新:
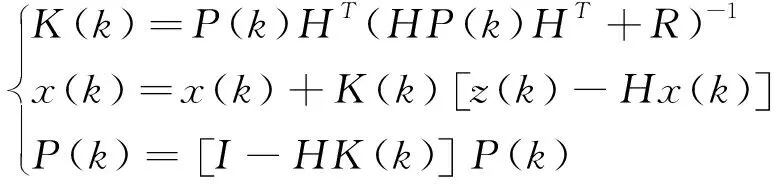
(2)
1.2 卡尔曼滤波器
在具体设计中,状态向量的选取影响到整个状态方程的结构,是卡尔滤波器设计的一个关键环节[7]。选取估计的加速度计常值偏差b作为状态向量,令x=[νb]T,离散系统采样率为fs,则有系统的状态方程和测量方程为:

(3)
卡尔曼滤波器的相关矩阵为:
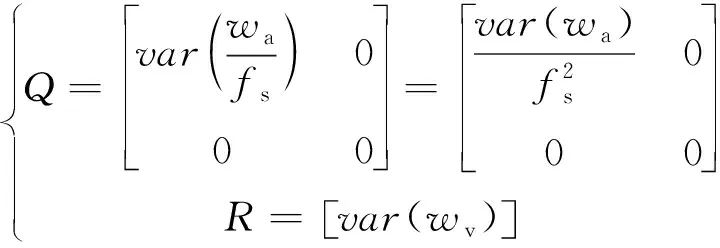
(4)
式中:ai—加速度计的测量值;νi—光电编码器的测量值;wa—加速度计的测量噪声;wv—光电编码器测量噪声;var(wa)—加速度计噪声方差;var(wv)—光电编码器噪声方差。
2 模糊自适应PID控制
2.1 模糊PID卡尔曼滤波器
如图2所示为参数模糊自整定卡尔曼滤波模糊控制系统框图。Rin为传感器检测信号,首先由模糊PID推理系统对其进行限制,通过规则优化减少滤波噪声方差,再经卡尔曼滤波器与控制干扰、测量噪声进行信息融合。其中,推理系统设计为增量式。
2.2 模糊PID推理系统


图2 参数模糊自整定PID卡尔曼滤波控制系统框图
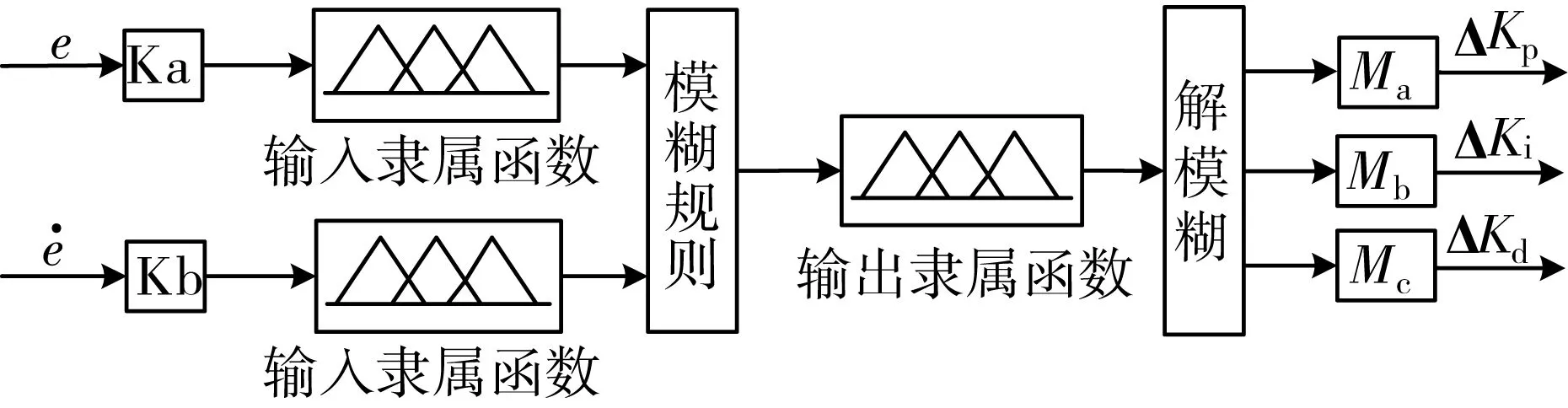
图3 模糊控制器结构图


表1 模糊控制器参数
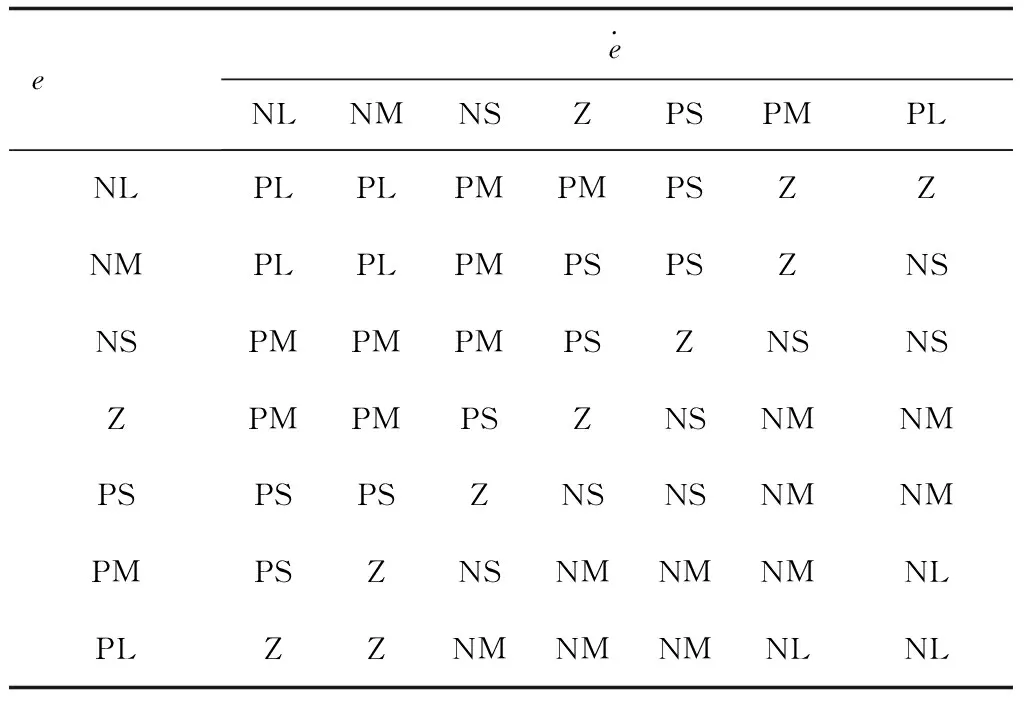
表2 ΔK对应的模糊控制规则表
图5所示输入输出特性曲面描述了系统输入与输出的对应关系。仿真实验结果表明,控制器隶属度函数参数选取合理,整个系统控制调节过程中整体平稳。
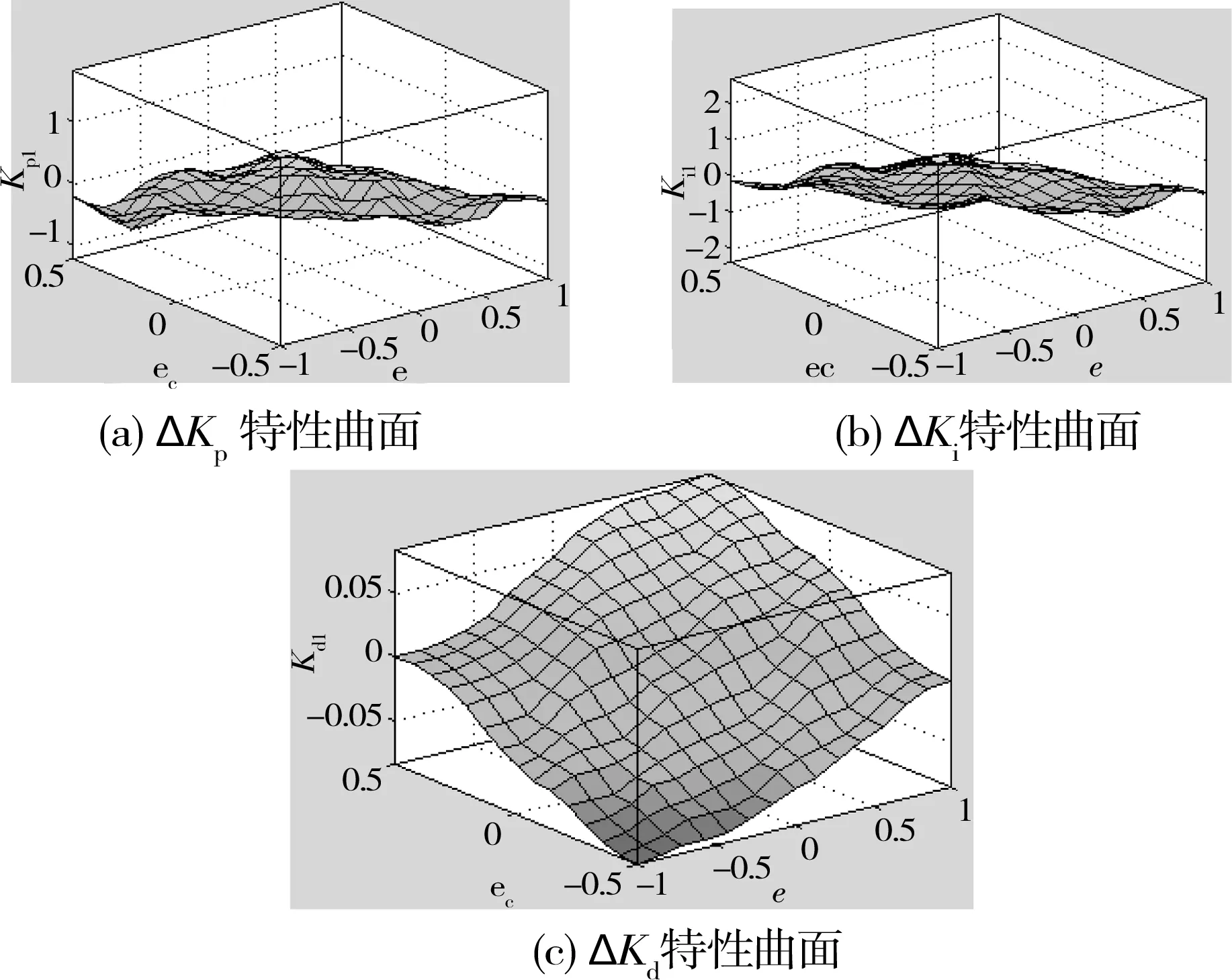
图5 模糊推理输入输出曲面视图
3 系统仿真
利用MATLAB软件搭建系统模型,将光电编码器和加速度计的测量值作为输入。设光电编码器测量值为vi=sin(6t)+wv,其中wv为模糊PID估计的白噪声;设加速度计测量值为ai=7cos(6t)-10+wa,其中wa是模糊PID估计的白噪声。经模糊PID卡尔曼滤波器完成信息融合,选取采样频率为100Hz。控制系统模型如图6所示,仿真结果如图7所示。
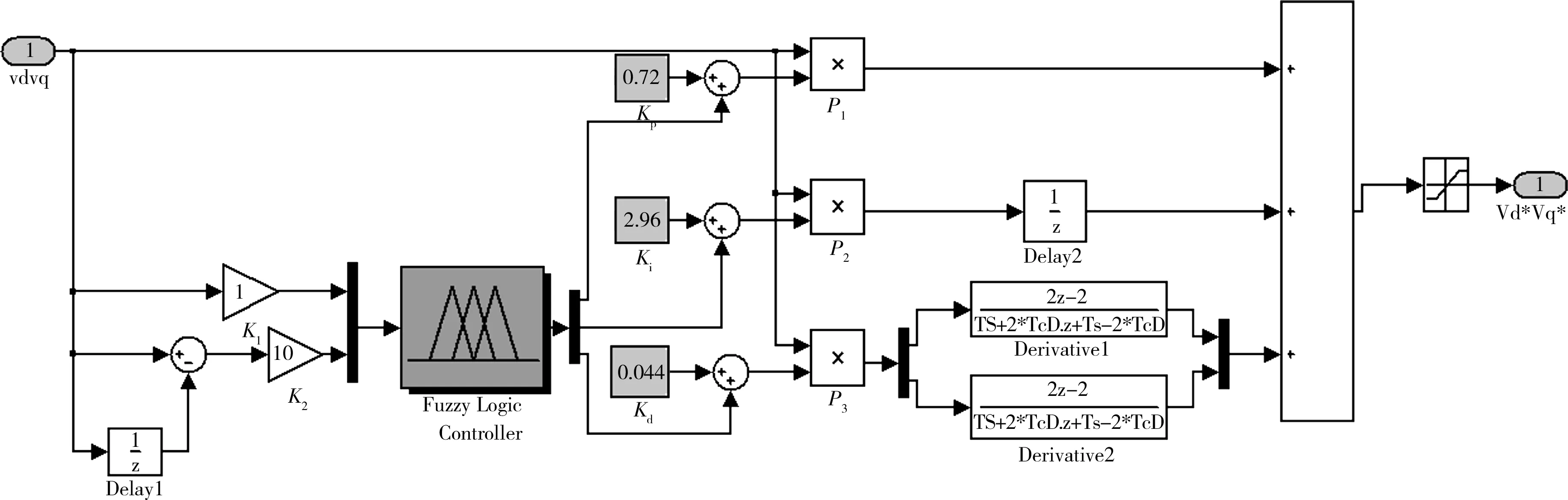
图6 参数模糊自整定PID控制系统图
4 结 语
(2)二维模糊控制器中PID参数由Z-N临界比例度法选取,再经增量式模糊规则对ΔKp、ΔKi、ΔKd进行反复修正和优化。

图7 参数模糊自整定PID控制效果图
(3)各传感器检测的信号经增量式参数模糊自整定PID控制器限制后经卡尔曼滤波器进行信息融合,提高了控制精度。
(4)设计的增量式参数模糊自整定PID卡尔曼滤波控制器对多传感信息融合效果好。
[1] Borenstein J,Everett H R,Feng L.Navigating Mobile robots:Systems and Techniques[M].Wellesley Mass:A K Peters,1996:130-217.
[2] Daniel R Fubrmann,Geoffrey San Antonio.Kalman Filter and Extended Kalman Filter Using One- Step Optimal Measuremen Selection[G].IEEE,2007.
[3] Mateo Aboy,Oscar W Marquez,James McNames,et al,A-daptive Modeling and Spectral Estimation of Nonst Ationary Biomedical Signals Based on Kalman Filtering[J].IEEE Trans on Bilmedacal Engineering,2005,52(8):1485-1489.
[4] Kalman R E.A New Approach to Linear Filtering and Prediction Problems[J].Journal of Basic Engineering,1960,82(Series D):35-45.
[5] 王晶,徐爱亲,翁国庆,等.动态电压恢复器控制策略研究综述[J].电力系统保护与控制,2010,38(1):145-151.
[6] 杨承凯,曾军,黄华.多传感器融合中的卡尔曼滤波探讨[J].现代电子技术,2009,32(14):159-161.
[7] 王晶,徐玲玲,徐爱亲.单相无串联变压器型DVR模糊控制策略研究[J].电力系统保护与控制,2012,40(2):56-60.
