基于MRAS的船舶推进电机转子磁场定向实时校正技术
2014-08-11李国锋夏建民
李国锋, 夏建民
(北车永济新时速电机电器有限责任公司, 陕西 西安 710016 )
基于MRAS的船舶推进电机转子磁场定向实时校正技术
李国锋, 夏建民
(北车永济新时速电机电器有限责任公司, 陕西 西安 710016 )
磁场准确定向是利用电动机间接磁场定向控制技术实现转矩和励磁解耦独立控制的关键,影响着整个船舶交流电推进系统的稳态和动态性能。通过对船舶电推进电动机矢量控制过程中的磁场定向方式进行演绎,以观测转子q轴磁链为模型,分析转子磁链大小、位置,并利用MRAS理论通过自适应调节实现转子磁场定向实时校正。在实际应用中证明了理论的正确性和磁场准确定向校正策略的有效性。
电动机 磁链观测q轴磁链误差 模型参考自适应系统
1 引言
交流异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。它的电流、电压、磁通和电磁转矩等量均处于相当复杂的耦合状态之中。上世纪70年代,西门子工程师F.Blaschke首先提出异步电动机矢量控制理论解决交流电机转矩控制问题,目前这种理论已广泛应用于各种交流传动系统,特别是在新兴的船舶电推进系统中得到应用和验证。矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向理论分别对异步电动机的励磁电流和转矩电流进行控制,从而达到异步电机转矩控制的目的。高性能异步电动机矢量控制系统建立在转子磁场准确定向的基础之上,然而电机运行过程中,容易受到温度、频率、磁路饱和和杂散损耗等工况的影响,造成磁链观测误差及电磁转矩观测误差,导致异步电动机运行在弱磁或者磁场饱和状态,加剧电机转矩脉动和转速脉动。目前应用中的船舶交流电推进系统中控制变流器已经具备异步电动机参数自适应辨识功能,使变频器在驱动推进电动机进行正常运行过程中自动完成电动机参数的辨识,同时根据辨识结果调制控制算法中的有关参数,达到矢量控制的最优化。
模型参考自适应系统(Model Reference Adaptive System,简称MRAS)是利用不含待辨识参数的参考模型和含有待辨识参数的可调模型相减得到一个输出误差,然后设计一个自适应规律改变可调模型的输出值,使得可调模型和参考模型输出误差为零。原理如图1所示。
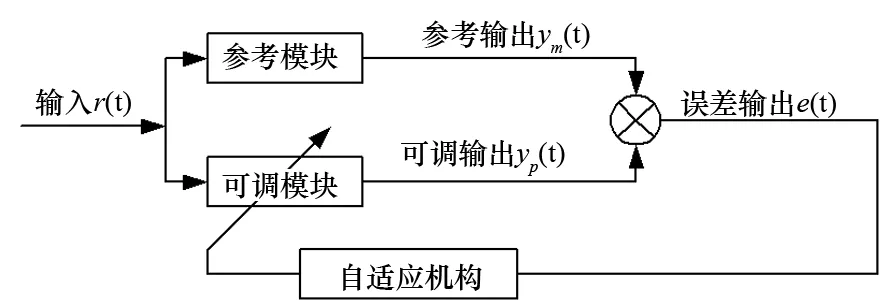
图1 模型参考自适应控制结构图
船舶电推进中推进电机的矢量控制以q轴磁链为模型,涉及到牵引电机的转子磁链观测、定子电压重构、定子电流检测、转差频率的计算和补偿等,实现精确的矢量控制。
2 转子磁链观测
异步电机转子磁链的大小和位置、磁链的准确估计对电机的控制性能非常关键,转子磁场定向即是按转子全磁链矢量Ψr定向。要得到转子磁链矢量的幅值和相位,可通过异步电动机磁链模型进行计算,模型分为电流模型和电压模型,两种模型是进行转子磁链观测的常用模型,船舶推进变流器控制中磁链测量观测使用的是电压模型。
在静止两相α-β坐标系中由异步电机的电压方程式可以得出:
(1)
式中:usα、isα为定子在α轴的电压和电流;usβ、isβ为定子在β轴的电压和电流;Rs、Ls为定子绕组的电阻和电感;Lm为定转子绕组间的互感。
牵引电机转子磁链方程为
(2)
式中:Ψrα、Ψrβ为α轴和β轴的定子磁链;irα、irβ为转子在α、β轴的电流。
由式(2)得到转子电流在α、β轴分量:
(3)
利用式(3)把式(1)中的irα、irβ置换并整理后得到:
那怎么办,等还是不等?真的交给运气?比较靠谱的方法我认为是斟酌考虑,比如从车流量看路况,从差不多路线的其它公交车上猜测情况,再可凭多日坐车的经验等等来判断。
(4)
式中:σ为漏感系数。
式(4)构成转子磁链电压模型如图2所示。
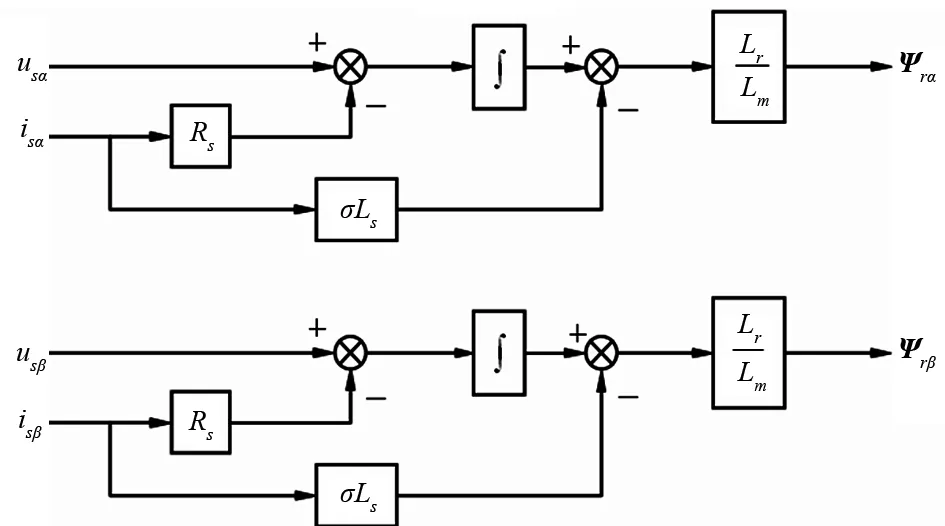
图2 电压模型磁链观测器运算框图
基于电压模型法的磁链观测需要定子电阻、定子电感、转子电感、定转子互感等参数,船舶推进变流器的控制过程中假定定子电感、转子电感不变,定转子互感则考虑了气隙磁通变化造成的影响,定子电阻的变化则通过安装在定子上的温度传感器的反馈进行校正计算,定子电流利用电流传感器进行测量,电压信号则通过电压重构来确定。
船舶电推进变流器采用电压源逆变器技术,利用电压重构技术得到磁链观测器中的电压变量值,电压重构方式选择基于PWM(脉宽调制Pulse Width Modulation)占空比配合中间电压测量并考虑针对半导体器件软件补偿技术来实现。理想的输出电压重构计算为
(5)
式中:Van、Vbn、Vcn为变频器输出三相电压;s1、s2、s3为三相桥臂上桥臂的占空比;Vdc为中间直流回路电压值。
由于半导体器件为非理想器件,人为设置的死区时间、开通时间、关断时间以及器件的管压降都会造成输出电压的失真,经过补偿后重构的变频器输出电压为[2]
(6)

基于电压模型法和电压重构形成的机车牵引电机转子磁链观测器内部模块结构图,如图3所示。
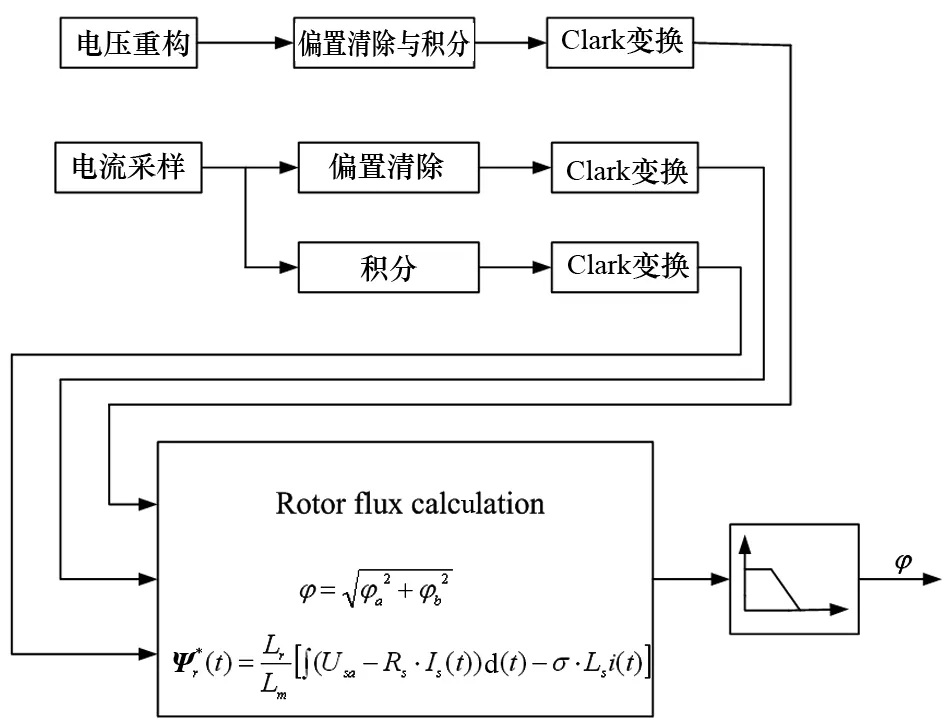
图3 磁链观测模型框图
电压模型法用于高速时性能比较好,低速时因电机产生的反电势较小,在此基础上计算得到的转子磁链不太准确;由于船舶推进电机配置了转速传感器,因此低速时选择磁链开环的转差频率矢量控制方式来过渡,此时根据性能需求允许在机车启动时考虑预励磁功能。
3 基于q轴磁链的MRAS参数辨识与校正
电压模型磁链观测器可以实现转子磁链的观测,且观测器不受转子电阻变化的影响,但模型中包含定子电阻Rs、Ls、Lr、Lm等电动机参数,这些参数的稳定性不同但都不是固定不变的;同时电压模型包含积分项,积分的初始值和累计误差都会影响到计算结果,使电压模型不够准确,影响到磁链的观测精度。船舶推进电机磁链观测采用在线参数自适应辨识的方法进行实时校正,基本框图如图4所示。
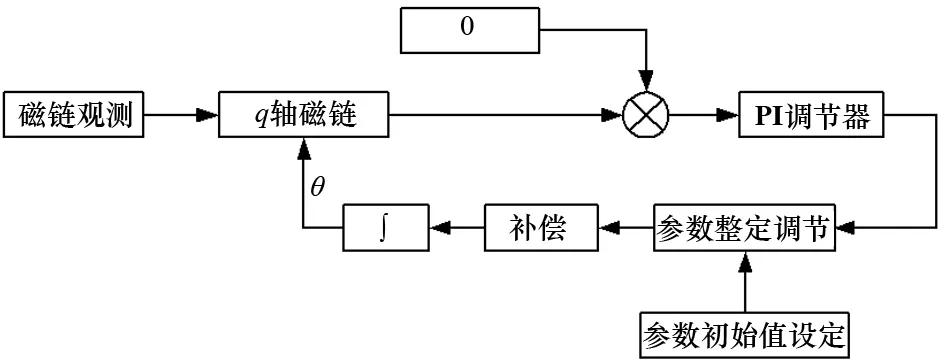
图4 基于q轴磁链的MRAS系统计算框图
以转子磁场定向的矢量控制系统中,将同步旋转坐标系的d轴固定在转子磁链相同方向上,此时转子磁链在q轴上的分量应该为0。由于磁链观测的误差,会导致转子磁链在dq轴上的分量重新分配,除了d轴存在转子磁链分量外,q轴会存在磁链分量而不再为0。为此构成磁链方向的自适应调节模型,如图5所示。
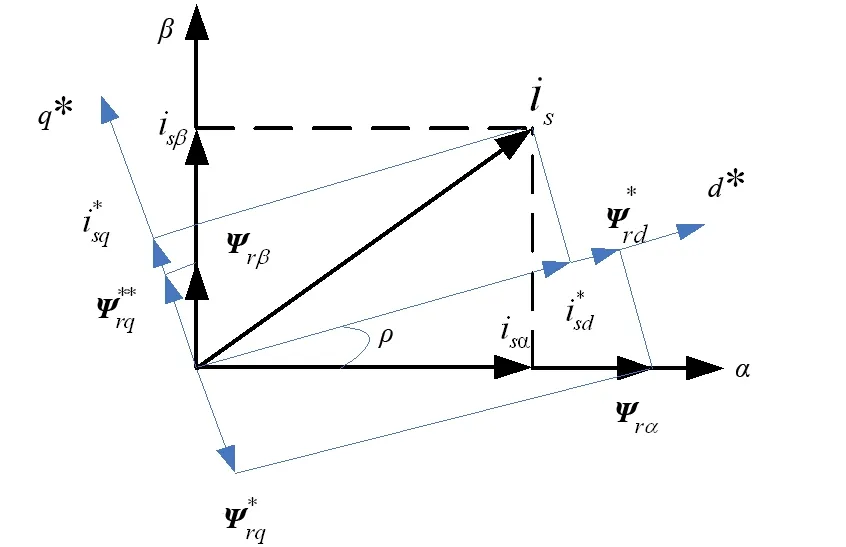
图5 自适应调节模型
根据图5构造的q轴磁链可调模型为
(7)
MARS自适应调节的过程为:利用重构的电压和采样得到的电流进行磁链观测,经过旋转坐标变换得到q轴磁链分量Ψadj,如果该值不为0,意味着转子磁场定向不准确,这来源于旋转坐标变换所采样的磁场定向角度ρ不准确,ρ的偏差则在于转差频率计算时所选择的电机参数的偏差,针对电机参数偏差的实时校正,不仅提高磁链观测的准确性,同时也为电机参数的实时校正提供条件。
对于自适应机制的选取,有两种较常用的设计方法,李雅普诺夫定理和超稳定性理论。对于高阶的线性系统或者多个自适应变量的系统,自适应机制的设计比较繁琐,数学推导复杂,计算量大。船舶交流传动推进系统在假设条件下使可调模型是一阶变量,采用最简单的自适应机制:PI调节器。比较特别的是参考模型设定为0,当q轴磁链不为0时,偏差将经过PI调解,产生一个转差频率补偿值Δ(见式8),针对补偿后的转差频率经过积分环节后修正磁链角度。
(8)
4 结论
基于大功率、高电压等级IGBT的变流器矢量控制策略有其自身的特点和规律,这些特点和规律已经在船舶上得到应用,验证了系统抵抗参数变化和抗干扰的鲁棒性。船舶电推进系统是本公司针对高铁技术引进关键核心技术消化吸收并推广应用的成果,以高铁技术引进为基础的大功率交流电传动系统在船舶电推进领域的推广仅仅是个开始,将为后续基于3 300 V/1 500 A、4 500 V/900 A、6 500 V/600 A等级IGBT器件,单轴电推进功率达到8 MW、16 MW的船舶交流电推进系统的应用开发积累经验。
[1] 陈伯时,陈敏逊.交流调速系统[M].北京:机械工业出版社,2013.
[2] 冬雷,李永东,王文森等.矢量控制中感应电动机转子电阻的自适应辨识[J].电工技术学报,2002,17(4):13-17.
[3] 孙向东,尚媛,钟彦儒等.三相电压源逆变器输出电压重构技术的研究[J].西安理工大学学报,2005,21(2):122-124.
[4] Lorenz R D. A Simplified Approach to Continuous On-Line Tuning of Field-Oriented Induction Machine Drives[J].Industry Applications,IEEE Transactions on,1990,3(26):420-424.
The MRAS-based Rotor Flux Orientation Real-time Correction Technique for Traction Motor of ship
LI Guo-feng, XIA Jian-min
(Technical Center,NCR Yongji Xinshisu Motor Electrical Equipment Co., Ltd.,Xian Shannxi 710016, China)
Accurate flux orientation is the key to achieve decoupling and independent control for torque and excitation using indirect field oriented control technology of electric motor, which has an influence on static and dynamic performance of the whole ship’s AC propulsion system. In this paper, the mode of flux orientation in ship’s propulsion motor vector control process is deducted. Based on the rotor q-axis flux model, we analysis the magnitude and location of the rotor flux, and by using the MRAS theory and adaptively adjusting to realize the real-time correction of rotor field oriented Experimental results verify that theoretical analysis is correct and correction strategy for accurate field orientation is effective.
Traction motor Flux estimationq-axis flux error MARS
李国锋(1969-),男,高级工程师。
U672
A
