RLV末端能量管理段混合制导方案
2014-08-09司马骏黄一敏
司马骏 黄一敏
南京航空航天大学,南京 210000
RLV末端能量管理段混合制导方案
司马骏 黄一敏
南京航空航天大学,南京 210000
提出了一种重复使用运载器(RLV)末端能量管理段的混合制导方案,以解决传统制导方案实现过于复杂的问题。在超音速飞行阶段,RLV飞行包线大,混合制导方案采用动压控制策略代替传统制导方案的高度控制策略,使得制导对轨迹剖面要求更少,轨迹参数计算量更小,控制结构也更加简单,从而大大简化了能量管理段的制导;在亚音速飞行阶段,RLV飞行包线小,混合制导方案采用与传统制导方案一致的高度/速度控制策略,其控制效果好,同时满足亚音速飞行阶段对飞行器高度、空速精确控制的要求。仿真结果表明,混合制导方案是可行的。
重复使用运载器;能量管理;混合制导;动压控制策略
重复使用运载器[1](Reusable Launch Vehicle, 简称RLV)末端能量管理段(Terminal Area Energy Management,简称TAEM)的任务是管理其初期再入段结束时的能量(马赫数约为2.5,高度约为25km),引导飞行器进入自动着陆段窗口(马赫数约为0.5,高度约为3km)。
RLV能量管理段传统的制导方案为高度/速度控制方案[2-3],文献[2-3]指出高度控制通过法向过载控制实现,而速度控制通过减速板控制(Speedbrake,简称SB)实现。在TAEM超音速飞行阶段,由于减速板强度限制,减速板不能用于控制,制导仅通过法向过载控制来跟踪高度、约束动压与总能量,其实现复杂,对轨迹剖面参数要求多,控制参数计算量大。进入亚音速飞行阶段,传统方案采用分别控制RLV高度与速度的策略,实现对总能量的控制,并保证飞行器高度、速度、轨迹倾斜角等满足着陆段窗口要求。
为了简化TAEM制导方案,同时保证制导性能要求,本文提出了一种混合制导方案,在超音速飞行阶段采用动压控制策略[4]代替传统的高度控制策略[3],通过法向过载控制来控制动压,并通过调整动压约束总能量,动压控制结构简单,对轨迹剖面参数要求更少,控制参数计算量更小。进入亚音速飞行阶段,混合制导保持传统方案的高度/速度控制策略[3],以满足亚音速飞行范围对飞行器高度、速度等状态的精确控制要求。
1 TAEM制导概述
TAEM飞行地轨迹如图1所示。

图1 TAEM飞行地轨迹
RLV进入末端能量管理段后,首先捕获安置在跑道一侧的圆柱切向飞行,直至接近圆柱并跟踪圆弧航迹飞行进入跑道,最终跟踪跑道中心线下滑,进入着陆段。根据飞行地轨迹可将TAEM分为4个阶段:S转弯段、捕获段、航向校准段和进场前飞行段。
TAEM制导可分为横侧向制导与纵向制导。横侧向制导目的是通过控制滚转角跟踪预定的地轨迹飞行,而纵向制导则通过控制能量跟踪下滑轨迹剖面。本文重点在于分析TAEM纵向制导方案,即对能量的控制策略。
RLV能量管理段无动力下滑时能量由势能和动能两部分组成,其总能量E为:

其中,V为RLV惯性速度,H为高度,m为飞行器质量,g为重力加速度。假设RLV的重量为W=mg,定义能量重量比E/W为:

TAEM制导中能量控制的目标在于控制下滑飞行过程中的能量消耗,以跟踪预定的轨迹剖面飞行,并最终捕获下滑轨迹剖面,使得飞行器末端高度、速度等状态满足着陆段窗口要求[1]。能量控制主要是通过法向过载(与迎角直接相关)控制和减速板控制实现,但在超音速飞行阶段,由于减速板强度限制,不能使用减速板,制导仅使用法向过载作为控制量,其制导控制效率较低,无法精确控制能量、高度与速度。进入亚音速飞行阶段,制导可同时使用法向过载与减速板作为控制量,大大增加了制导控制效率,从而可精确控制飞行器高度、速度等状态。
文献[2-3]指出传统制导方案应用于航天飞机的能量管理段,具有良好的控制效果。但在超音速飞行阶段,传统制导方案的高度控制策略过于复杂,主要体现为以下2点:
1) 传统方案要求制导提供动压剖面、高度剖面、能量剖面以及能量约束上下边界,其需要的轨迹剖面多,轨迹参数计算量大;
2) 传统方案通过法向过载控制来控制高度,跟踪高度剖面,同时法向过载控制还用于约束能量与动压在安全飞行范围内。制导需分别设计高度控制器、能量约束控制器[3]与动压约束控制器[3],其制导控制结构复杂,控制参数计算多。
而TAEM亚音速飞行马赫数变化范围约为0.8至0.5,RLV飞行包线小,涉及轨迹剖面参数少,传统制导方案采用高度/速度控制策略,通过分别控制飞行器高度(能量势能部分)与空速(能量动能部分),间接实现对总能量的控制,同时也适应着陆段窗口对飞行器高度、空速的严格约束。此外,通过法向过载控制来控制高度,以及减速板控制来控制飞行器空速(或动压),都被证明有良好的控制效果。
2 混合制导方案
混合制导方案在超音速飞行阶段采用动压控制策略,通过法向过载控制来控制动压,跟踪动压剖面,并通过调整动压控制指令来约束总能量。进入亚音速飞行阶段,混合制导方案保持传统的高度/速度控制策略,通过法向过载控制RLV飞行高度,跟踪高度剖面,而减速板用于控制RLV动压(等效于控制空速)跟踪动压剖面。
2.1 动压控制策略
当没有风影响时,飞行器空速等于惯性速度,此时根据空速与动压的关系,可推导有:
由上式可知,能量可分为动压与高度两部分。在超音速飞行阶段,制导仅使用法向过载作为控制量,目标在于初步调整能量,约束能量、动压、高度与空速在合理范围内。动压控制策略即控制能量的动压部分,动压与RLV空速、高度同时相关,控制动压可以实现初步调整能量的制导要求。
超音速飞行范围内,RLV高度从约25km下降至约12km,而马赫数从约2.5减至0.8,其高度与速度变化范围大。而动压同时与RLV高度、速度相关,随着高度的降低,飞行速度减小,而大气密度增大,使得动压的变化变慢,且动压变化范围小。图2给出了典型的动压剖面。
图2 典型动压剖面
图2所示动压剖面中待飞距离定义为TAEM下滑飞行剩余的地轨迹长度,动压随待飞距离变化呈近似线性变化。所以,在超音速飞行阶段,控制动压跟踪动压剖面实现简单。
根据质点动力学,动压的变化率满足下式:
而在平衡状态时可证明动压满足:

由上式可知,动压变化率与飞行器空速、大气密度相关,所以,动压是一个缓慢的变化量,动压控制回路可以增加飞行器长周期阻尼,并且可以使拐弯时航迹控制效果更好。

其中,V为RLV惯性速度,γ为航迹倾斜角,dR为单位时间内飞行距离。根据飞行器质点动力学方程,可有:

由上式可知,若TAEM飞行过程中动压越大,则阻力越大,并使下滑轨迹更陡(γ负的越大),从而使能量梯度越大。调整动压高于或低于标称动压,使能量消耗变快或变慢,从而约束总能量在合理偏差范围内。动压是一个缓慢变化量,调整动压无法精确控制能量,但可以消除较大的能量偏差,符合TAEM超音速飞行阶段的制导要求。
动压控制是通过法向过载控制实现,动压控制回路如图3所示。
图3 动压控制回路
为了约束飞行器总能量,动压指令计算为:
|E/Wc-E/W|>1000m:
|E/Wc-E/W|≤1000m:
2.2 高度/速度控制策略
进入亚音速飞行范围,制导目标在于捕获下滑轨迹剖面,精确控制飞行器高度、空速(或动压)等状态,以满足着陆段窗口要求。文献[1-4]中均指出高度/速度控制策略被证明有良好控制效果。
高度控制通过法向过载控制实现,其控制回路如图4所示。
图4 高度控制回路
高度控制制导律为:


3 混合制导仿真
图5 减速板控制动压结构图
TAEM制导目标是跟踪标称轨迹飞行,最终捕获下滑轨迹剖面,安全进入跑道着陆范围。评价TAEM制导性能主要考虑RLV飞行能力与TAEM安全飞行范围。TAEM初始位置、航向的不确定性以及纵向风(顺风或逆风)是影响制导性能的2个重要因素,即在TAEM初始状态存在很大不确定性及可能遭遇纵向风影响情况下,制导系统是否能引导飞行器安全进入着陆段。针对本文提出的混合制导方案,在考虑初始位置、航向的不确定性与风的影响情况下进行TAEM制导仿真验证。
表1给出了考虑不同航向、位置与纵向风影响下的仿真初始条件。其中,Ψ为航向角,X为RLV相对跑道纵向距离,Y为相对跑道侧向距离,Vw为纵向风速,TW代表顺风飞行,HW代表逆风飞行。
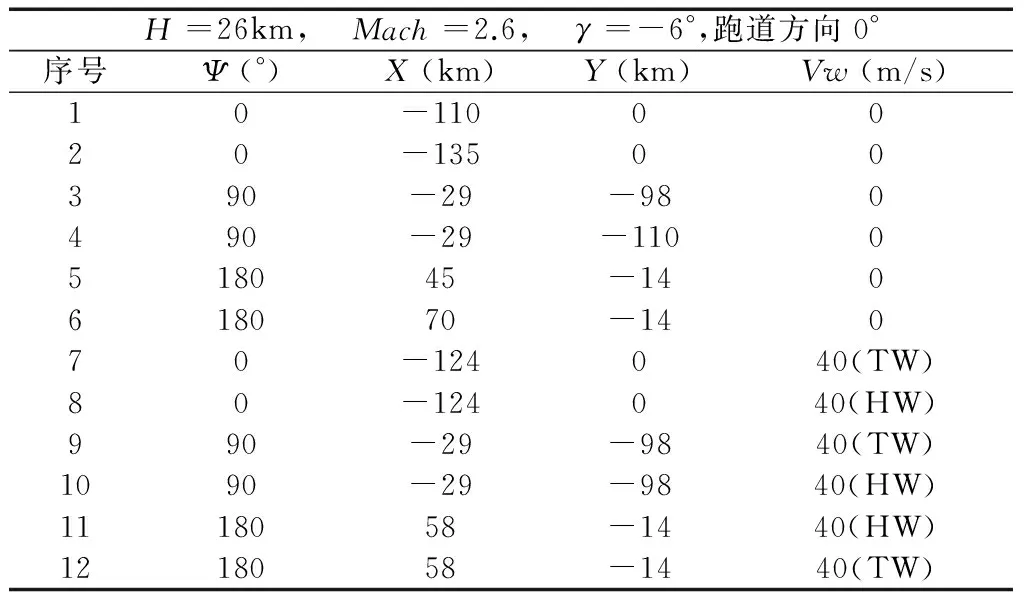
表1 制导仿真初始条件
表2给出了超音速飞行阶段制导末端状态与理想轨迹状态的仿真误差。
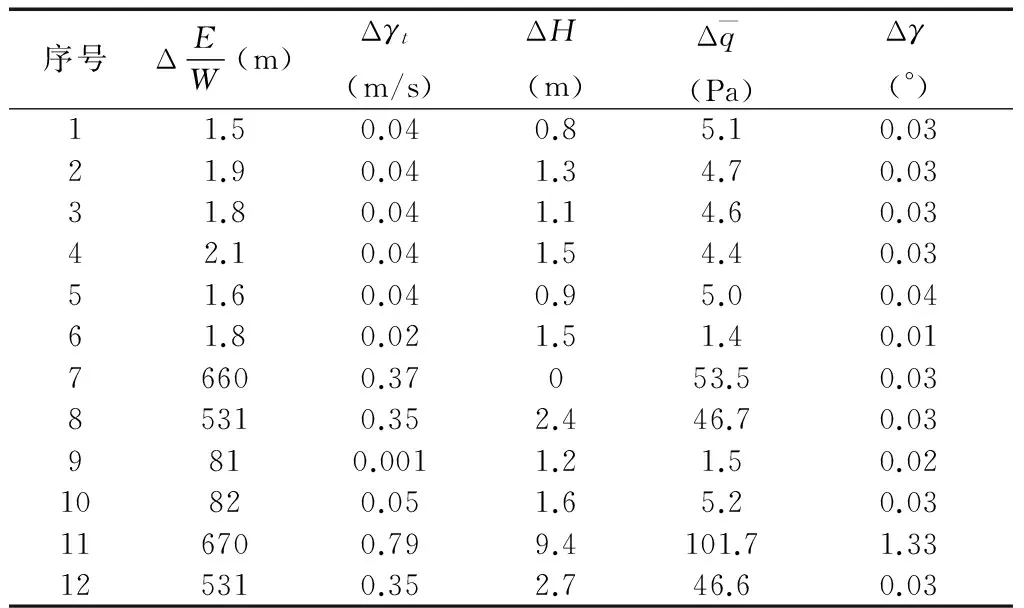
表2 制导仿真误差

序号1~6的仿真没有考虑风的影响,此时飞行器各个状态量与标称状态量误差很小,满足制导性能要求。序号7~10的仿真考虑了风的影响,此时飞行器高度、空速与动压误差很小,而能量误差较大,这是因为能量与惯性速度相关而不是空速,当有风时,空速与惯性速度不相等,制导系统为了控制空速,必须损失惯性速度来补偿风的影响,即损失动能,这也使能量存在一定偏差,所以仿真结果同样满足制导性能要求。
图6给出了动压、高度、空速与能量的随飞行距离变化仿真曲线,图7给出了迎角变化曲线。
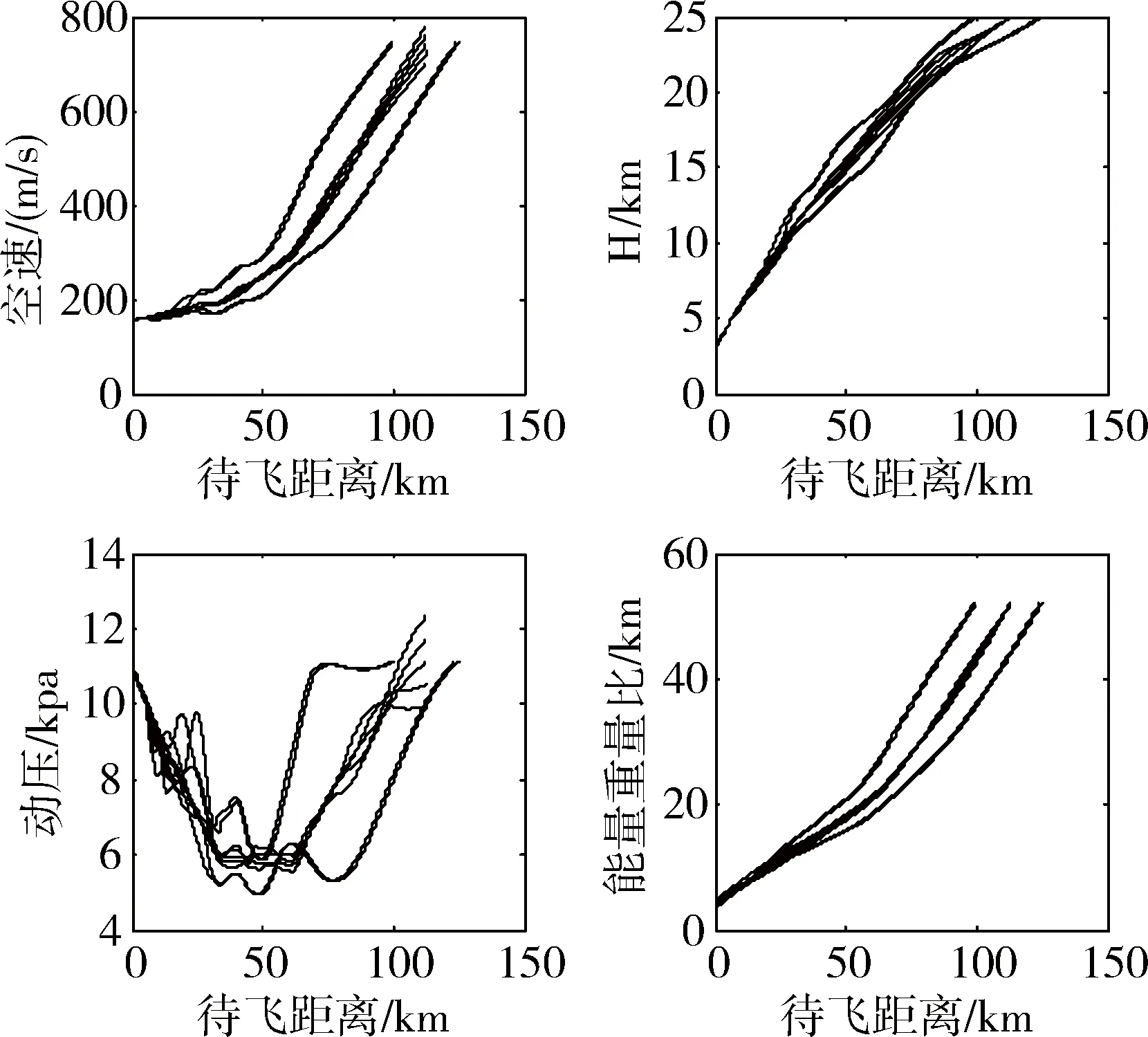
图6 仿真状态变化曲线

图7 迎角变化曲线
从上述仿真曲线可知,TAEM飞行过程中RLV的能量、动压、高度等状态变化均在安全范围内,且高度、空速、轨迹倾斜角末端状态均满足TAEM末端窗口要求。
图8给出了一组典型的轨迹跟踪曲线,包括空速、高度、动压与能量,图9给出了相应的迎角变化曲线。其中,实线为实际状态随时间变化,虚线为轨迹状态随时间变化。
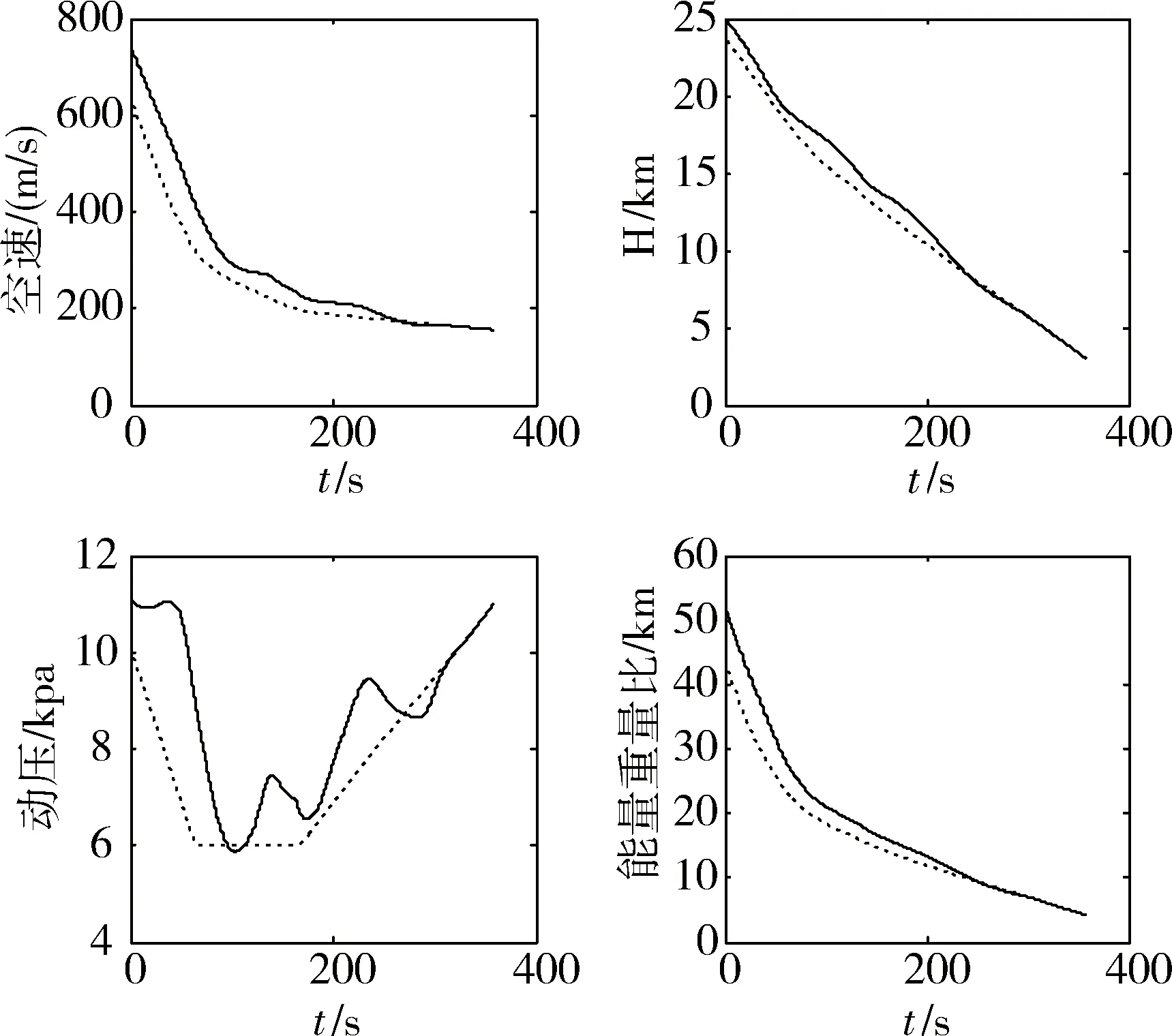
图8 典型跟踪曲线
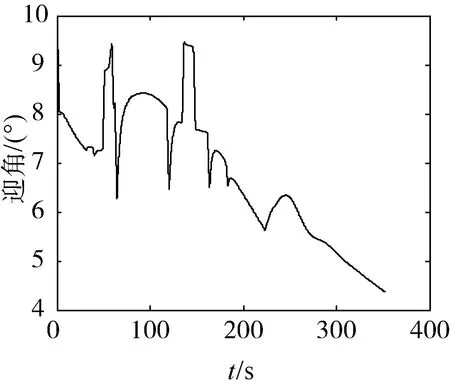
图9 迎角变化曲线
上述仿真跟踪曲线表明在初始能量、动压、高度与速度存在较大偏差情况下,超音速阶段能量、动压、高度与速度状态被控制在较小偏差范围内,进入了亚音速飞行阶段,各个状态快速跟踪上轨迹剖面。
以上仿真与分析结果证明了TAEM混合制导方案是可行的。在超音速飞行阶段,相比传统的高度控制策略,混合制导采用的动压控制策略更加简单,具体体现为:
1) 超音速阶段RLV飞行包线大,涉及轨迹参数多,动压控制策略要求更少的轨迹剖面,只需制导提供动压剖面与能量剖面,其轨迹参数计算量也更小,从而大大简化了制导对轨迹的要求;
2) 超音速飞行范围制导仅使用法向过载作为控制量,控制能力小。法向过载直接应用于控制动压,通过动压指令限幅可直接实现对动压的约束,也即约束舵面铰链力矩,而能量约束则只需通过调整动压指令实现,其制导结构更加简单。
在亚音速飞行阶段,RLV飞行包线小,涉及轨迹参数少,且制导控制能力强,可同时控制飞行器高度与动压(或空速),此时混合制导采用传统的高度/速度控制策略的控制效果好,同时可保证飞行器高度、空速满足着陆段窗口要求。
4 结论
兼顾TAEM制导简单性与制导性能要求,提出了一种混合制导方案,即超音速飞行阶段采用动压控制策略替代传统方案的高度控制策略,制导实现更简单,大大简化了TAEM制导。而亚音速飞行阶段保持传统方案的高度/速度控制策略,控制效果好,可同时实现对总能量的控制并且保证着陆段窗口对飞行器高度、空速等状态的严格约束。并通过制导仿真验证了混合制导方案的可行性。
在后续研究工作中,需进一步完善混合制导方案的动压控制策略,文献[2-3]指出法向过载并不是一个好的控制量,如何选取一个与动压联系更紧密的控制量是关键。
[1] 孙春贞.重复使用运载器末端区域能量管理与无动力自动着陆技术研究[D].南京:南京航空航天大学,2008.
[2] 杨一栋.空间再入返回制导与控制[M].北京:国防工业出版社,2006:161-197.
[3] Thomas E Moore.Space Shuttle Entry Terminal Area Energy Management [M].Houston:NASA Johnson Space Center,1991.
[4] Ehlers H L, Kraemer J W.Shuttle Orbiter Guidance Systerm for the Terminal Flight Phase [J].Automatic,1997:11-21.
[5] Garman Golbert L,Montez Moises N.Shuttle TAEM Guidance and Flight Control [M].Houston:NASA,1991.
[6] Grubler A C.New Methodologies for Onboard Generation of Terminal Area Energy Management Trrajectories for Autonomous Reusable Launch Vehiclesm[D].Massachusetls:MIT, 2001.
A Mixed Guidance Method for Terminal Area Energy Management of RLV
SIMA Jun HUANG Yimin
Nanjing University of Aeronautics and Astronautics, Nanjing 210000, China
Amixedguidancemethodforterminalareaenergymanagement(TAEM)ofreusablelaunchvehicle(RLV)tosimplifythetraditionaryguidancemethod.DuringtheTAEMsupersonicflightphase,withwideflightenvelop,themixedguidancemethodadoptsdynamicpressurecontrolinsteadofthetraditionaryattitudecontrol.ThedynamicpressurecontrolmethodnotonlyrequireslessTAEMtrajectoriesandparametercalculation,butalsomakestheguidanceloopsimpler,whichgreatlysimplifiestheguidancesystemforTAEM.Duringthesubsonicflightphase,withnarrowflightenvelop,themixedguidancemethodadoptsthesameattitude/speedcontrolwithtraditionaryguidancemethod,whilethetraditionarymethodisdemonstratedtoproducegoodperformanceandmeetthestrictrequirementsofattitudeandairspeedinsubsonicflightphase.Furthermore,themixedguidancemethodisproventobeusefulbytestingwithcomputersimulation.
RLV;Energymanagement;Mixedguidance;Dynamicpressurecontrol
2013-08-16
司马骏(1990-),男,安徽宿松人,硕士研究生,主要研究方向为无人飞行器控制技术;黄一敏(1969-),男,南京人,研究员,主要研究方向为无人机飞行控制技术、直升机飞行控制技术等。
V448.2
A
1006-3242(2014)01-0030-05
