轻型高压直流输电系统的仿真与故障分析
2014-08-09张红涛田媛孙志勇
张红涛,田媛,孙志勇
(华北水利水电大学电力学院,郑州市 450011)
0 引言
轻型高压直流输电 (high voltage direct current light,HVDC Light)技术是一种以电压源换流器(voltage sourced converters,VSC)为基础的高压直流输电技术,它的换流部分由绝缘栅双极晶体管(insulated gate bipolar translator,IGBT)组成。电压源换流器采用脉宽调制控制技术,无需任何换相电压,可以向有源或者无源网络输电[1-3]。随着新能源和分布式发电的发展,特别是我国风力发电技术的发展,客观上需要将各种新能源发电通过一定的变换环节接入电网,HVDC Light无疑是一种合适的方式[4]。
我国对HVDC Light技术研究和工程应用起步比较晚,但是在大力发展可再生能源和节能减排的环境下,HVDC Light系统也具有广泛的应用前景[5]。本文在分析HVDC Light的基本原理和运行特性的基础上,采用常用的仿真软件MATLAB/SIMULINK对已有的HVDC Light模型进行仿真,同时设置多种故障类型,对系统的运行情况进行仿真以及结果分析。
1 HVDC Light系统的结构原理与模型搭建
1.1 结构原理
与传统直流输电技术不同的是,HVDC Light技术采用绝缘栅双极晶体管(IGBT)的电压源型换流器,具有关断电流的能力,可以应用脉宽调制(pulsewidth modulation,PWM)技术进行无源逆变,解决了用直流输电向无交流电源的负荷送电的问题[6]。同时,这种HVDC Light系统由于采用 PWM,能够对换流站输出交流电压幅值和相角在一定范围内连续可调,而且这种调节能够迅速完成,从而也能对系统潮流方便进行调节[7]。HVDC Light系统中换流器采用电压源型,输出电压的控制方法不采用180°导通模式,而采用PWM调制方式,故HVDC Light是一种基于VSC和PWM的新型直流输电技术,也称 VSCHVDC[8-9],同样称换流站为VSC换流站。其结构原理如图1所示。

图1 轻型直流输电的基本原理Fig.1 Basic principle of HVDC Light transmission
VSC换流站的工作原理为:VSC设有受端和送端2个换流站,分别进行整流和逆变操作,VSC的各桥臂由全控型半导体器件IGBT和一个反并联的续流二极管组成,直流侧并联电容器以保持一定的直流侧电压,VSC采用正弦脉宽(sinusoidal pulse width modulation,SPWM)调制方式,通常有两电平结构和三电平结构[10]。
1.2 轻型直流输电仿真模型
图2为 HVDC Light的仿真模型。200 MVA、+/-100kV的强迫换流型VSC将2个交流系统相连,2个交流系统基本参数均为230 kV、2000 MVA、50 Hz,相角为80°,带有三次谐波。整流器和逆变器采用封闭IGBT/Diodes作为电子元件。整流器和逆变器通过2条75 km(2段的π型电路)的电缆和2个8 mH的平坡电抗器相连。正弦脉宽调制(SPWM)开关使用一个单相的27倍基波频率(1350 Hz)的三角载波。整流器交流侧的可编程电压源模块用来对电压跌落进行仿真。一个故障发生器用来在逆变器交流侧提供三相接地故障[11]。
2 系统正常运行时的仿真
为保证系统的正常运行,设置在时间为0.1 s时逆变器控制系统投入系统使用,而0.3 s时整流器控制系统投入使用。观察其电压、电流等的仿真结果,可得到部分仿真波形图如图3(a)、(b)所示。
由图3可知,系统经过大约1.3 s的时间进入稳定工作:三相电压Vabc基本稳定;三相电流Iabc在0.3 s整流器的控制系统以及逆变器控制系统均投入使用后逐渐增大,在1 s后稳定于1 pu;整流侧与逆变侧之间传输的有功功率Pmeas在开始仿真时几乎为0,之后也于0.3 s后逐渐增加,大约在1.2 s后稳定于1 pu,由于功率在传输中有消耗,很明显在逆变侧的有功功率略小于1 pu;对于无功功率Qmeas,在2个控制系统没有投入轻型直流输电系统中使用之前,系统消耗无功功率,当0.1 s时逆变侧投入使用后,逆变侧的无功功率接近为0,0.3 s后整流侧也投入使用,系统整体传输的无功功率均可视为0,当然系统中含有电抗器、电容器等,会消耗一部分的无功功率;Vdc为直流输电的电压值,可见其测量值在逆变与整流器控制器投入后也基本稳定于1 pu。
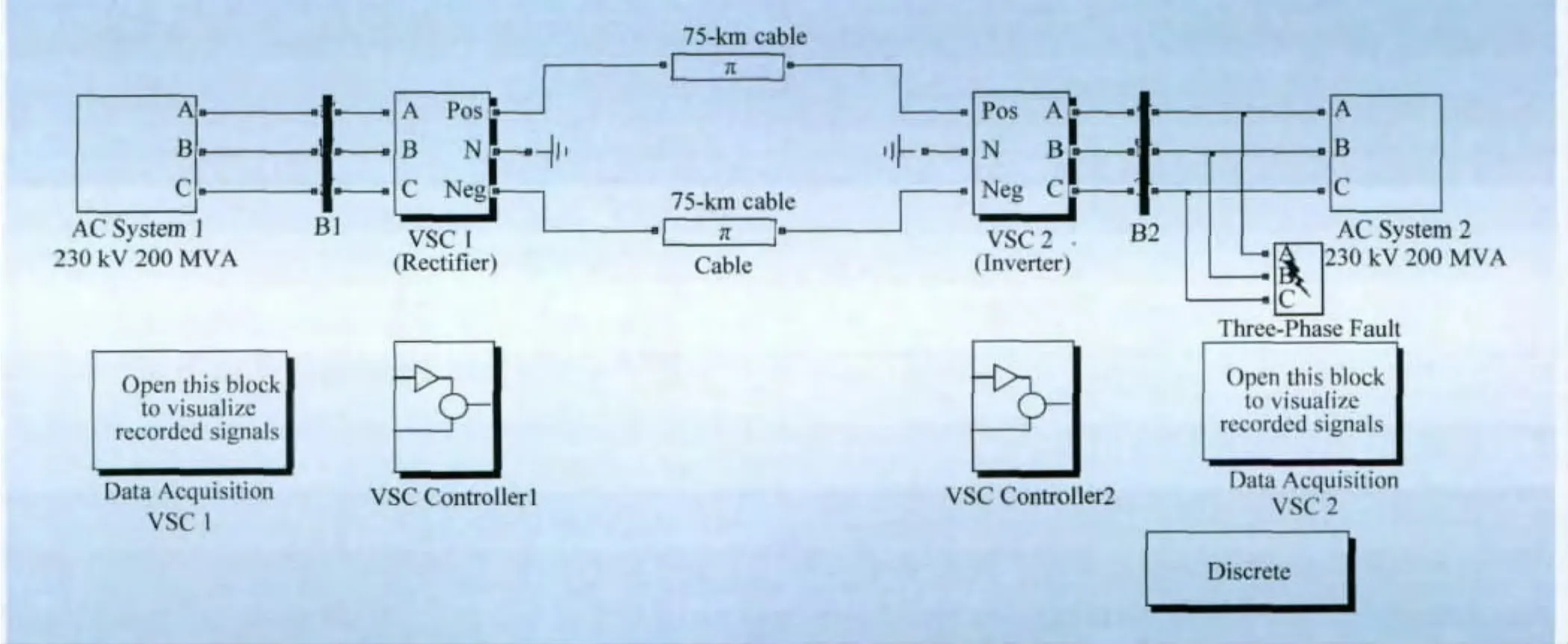
图2 HVDC Light仿真模型主拓扑Fig.2 Primary topology of HVDC Light simulation model

图3 系统正常运行时的部分仿真波形Fig.3 Part of simulation waveforms in normal operation
3 系统在不同情况下的仿真
3.1 功率和直流电压调节器的稳态阶跃响应
在HVDC Light系统中设置有多个阶跃信号,对其动作时间进行设置可控制参数的变化,除了0.1 s和0.3 s时分别对逆变器和整流器控制系统的投入进行控制外,对有功参考功率、无功参考功率以及直流参考电压的值也进行了改变,如表1所示。

表1 仿真系统稳态阶跃响应的控制Tab.1 Control of steady step response in simulation system
观察调节器的动态响应,仿真结果如图4(a)、(b)所示。

图4 稳态阶跃响应的部分仿真图Fig.4 Part of simulation diagrams for steady step response
从图4中可看出,有功、无功和直流电压参考值发生变化后,系统重新进入稳态需要0.3 s左右时间。有功功率和无功功率的控制从理论上讲是独立的,但是从波形分析可见,两者之间还是存在相互影响。
3.2 交流侧扰动
仿真中设置的交流侧扰动主要有2个,一个是在t=1.5 s时三相交流电源系统内的三相可编程电压源模块发生的电压暂降,设置电压降低0.1 pu,持续0.14 s之后恢复正常;第二个交流侧扰动设置为三相负载侧发生严重的三相短路接地,令三相短路接地故障在t=2.1 s时发生,持续0.12 s之后系统恢复正常运行。本节中交流侧扰动不考虑阶跃信号控制的投入,所得的是只考虑电压暂降及三相短路接地时的仿真波形。部分仿真结果如图5(a)、(b)所示。
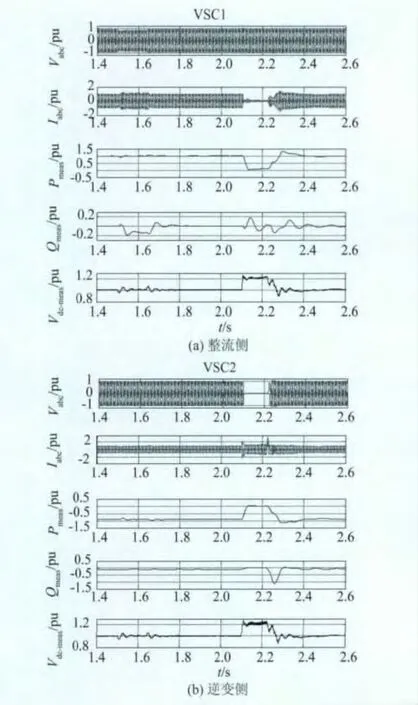
图5 交流侧扰动时的部分仿真波形Fig.5 Part of simulation waveforms under AC-side disturbances
由图5可知,在时间t=1.5 s时,换流站l交流电压发生暂降后,整流侧有功和无功功率各自偏离当前扰动约0.1、0.2 pu,逆变侧有功和无功功率各自偏离当前扰动约0.1、0.03 pu,在小于0.3 s的恢复时间后再次达到稳态;在时间t=2.1 s时,在VSC2交流侧发生了严重的三相接地故障,直流功率的传输几乎为0,直流侧电容过充电使得直流电压增大到1.2 pu,经过有功功率控制环节的控制,直流电压被限制在可接受的范围内。此外,从图5中还可以清楚地看到无功功率发生了阻尼振动。
4 结论
本次建立的HVDC Light系统的仿真模型及其控制方法能较好地模拟HVDC Light系统在2个交流系统之间输电的情况,各控制环节的PI调节器及控制器灵活、简便、有效,能够很好地控制系统的潮流与稳定,满足各种控制方式的需要。仿真结果证明了HVDC Light系统的可行性和仿真模型的正确性,稳定、灵活、高效的特性使该技术能作为一种新型的输电方式应用于工程中。
[1]孙峰,叶鹏,蔡志远,等.轻型直流输电建模与仿真的研究[C]//第十一届全国电工数学学术年会论文集.福州:中国电机工程学会电工数学专业委员会,2007:103-108.
[2]刘文泽,王增煜,陈韦宇,等.两端均为有源网络的 VSC-HVDC系统仿真研究[J].电力工程,2012,28(1):6-12.
[3]侯慧,游大海,尹项根.轻型高压直流输电技术的发展与应用[J].电力建设,2005,26(11):28-30.
[4]Xu L,Andersen B R,Cartwright P.Multilevel-converter-based VSC transmission operating under fault AC condition[J].IEE Proc Transm Distrib,2005,152(2):185-193.
[5]胡航海,李敬如,杨卫红,等.柔性直流输电技术的发展与展望[J].电力建设,2011,32(5):62-66.
[6]明战起.轻型直流输电(VSC-HVDC)系统仿真研究及硬件实现[D].北京:华北电力大学,2007.
[7]孟垂懿,蔡志远,马少华,等.VSC-HVDC输电系统特点与应用[J].科技信息,2011(30):132-134.
[8]金璐,于振江.轻型直流输电技术的有功无功独立控制[J].电气制造,2010(7):60-61.
[9]王晶.电力系统的MATLAB/SIMULINK仿真与应用[M].西安:西安电子科技大学出版社,2008.
[10]Dull'ant M,Wemer H,AbboU K.Model of a VSC HVDC terminal attached to a weak AC system[C]//Proceedings of 2003 IEEE Conference on Control Applications.2003,1(1):178-182.
[11]屈鹏.基于MATLAB的轻型高压直流输电系统仿真[J].中国西部科技,2009,8(22):24-36.
