基于北斗II代/GPS的电力系统双模时间同步时钟的研制
2014-08-09童伟
童伟
(国网北京经济技术研究院,北京市 100052)
0 引言
时间同步系统正在成为电力系统稳定运行的关键因素。随着智能电网建设的不断推进,通过硬件基础和技术手段实现智能电网的信息化、数字化、自动化和互动化,未来智能电网技术的推广和应用,如广域测量系统、智能化调度系统以及实时监测和分析系统等技术,电力系统发、输、配、用电的智能化要求,对时间同步的要求会非常高[1-2]。
目前,电力系统中的同步时钟系统的时间源主要来自于美国全球定位系统(global positioning system,GPS)提供的同步时间基准[3-4]。美国已成功掌握了“局部屏蔽GPS信号”等技术,对国内各种GPS应用带来了潜在的隐患。电网作为国家的重要基础设施,GPS所提供的时钟问题给国家的战略安全带来严重威胁。
北斗卫星导航系统(Beidou navigation satellite system)是我国正在实施的自主发展、独立运行的全球卫星导航系统。2004年4月,北斗卫星导航试验系统“北斗I代”区域卫星导航系统正式建成并投入使用,2012年12月27日,“北斗II代”系统开始向亚太大部分地区提供正式服务,预计在2020年前再发射30多颗卫星,组成覆盖全球的卫星导航系统。随着北斗卫星导航系统的发展,目前国内下游研发和应用产业链已经初步形成,如中国卫星通信集团、国腾电子等厂商已经能够独立自主研发和生产北斗基础产品和终端设备,提供基于北斗的各种服务。2013年4月20日,在芦山地震发生后,北斗终端设备为抗震救灾提供了应急导航定位保障,表明运行半年的“北斗II代”系统完全能够在特殊情况下独立正常工作。
因此,有必要发展基于北斗卫星导航系统的电力系统时间同步时钟,同时不排斥GPS,两者互为备用。国家电网公司在“十二五”规划中也提出了“无线同步技术和有线同步技术相结合的方式,无线时间同步信号主要依靠GPS及北斗卫星授时,有线时间同步可利用时钟同步网提供的基准信号通过数据网络进行传送”。
本文基于北斗II代/GPS双模卫星导航接收模块、Cortex-M3架构的ARM微处理芯片和复杂可编程逻辑器件(complex programmable logic device,CPLD)研制一套电力系统双模时间同步时钟。该时钟能够接收北斗II代/GPS双模时间信息,同时可以接收IRIG-B等其他时间源互为备用。装置使用1 U标准机箱,体积小、功能接口丰富,具备4种对时方式[5-6]:脉冲对时、串口报文对时、IRIG-B方式对时、网络方式对时。输出信号类型包括 RS232/485串行口、IRIG-B、脉冲以及网络时间协议 NTP/精确时间协议 PTP[7]。
1 北斗II代/GPS双模卫星导航接收模块
本文时间同步时钟的主要时间源使用自行研制的一种北斗II代/GPS双模卫星导航接收模块,该模块支持北斗II代和GPS的单系统定位和双系统联合定位,采用杭州中科微电子拥有自主知识产权的射频接收芯片和基带处理芯片。
北斗II代/GPS双模卫星导航接收模块结构框图如图1所示,卫星有用的信号和噪声的混合信号经天线单元进入射频接收芯片HZ1112BD,经2次降频、锁相获得低频模拟信号,然后被还原成合适的数字信号经串行外围设备接口SPI(serial peripheral interface)输出给基带处理芯片ATGB02进行处理。

图1 双模接收模块结构Fig.1 The structure diagram of dual-mode receiver module
基带处理芯片ATGB02通过相关运算完成对卫星信号的解扩和通过载波的相关运算完成对卫星信号载波多普勒频移的搜索,进而通过码跟踪环路和载波跟踪环路对捕获后的信号进行跟踪,通过对卫星信号的解码,获得同步于格林威治天文台的同步时间以及模块所在地的精确位置信息,最后以导航设备统一标准报文协议NMEA 0183和秒脉冲(pulse per second,PPS)的形式进行输出,具体内容可以通过算法灵活调整。双模接收模块的主要技术规范如表1所示。

表1 双模接收模块的主要技术规范Tab.1 The main specification of dual-mode receiving module
2 时间同步时钟的整体设计
根据文献[5],电力系统时间同步时钟的组成应由接收单元、时钟单元和输出单元3个部分组成,如图2所示。

图2 同步时钟基本组成Fig.2 Basic structure of synchronization clock
2.1 硬件结构框图
本文设计的时间同步时钟系统包括主机和从机,主要时间源为上文中的双模模块输出的无线时间源,同时接收有线时间源如串口报文、IRIG-B以及NTP/PTP[7]互为备用。采用先进的钟控算法,自动选择时间源,实现了不同时间源的无损切换。在外部时间源都不可用时,由系统内部时钟守时算法在一定时间内提供高精度守时功能[8],硬件结构如图3所示。
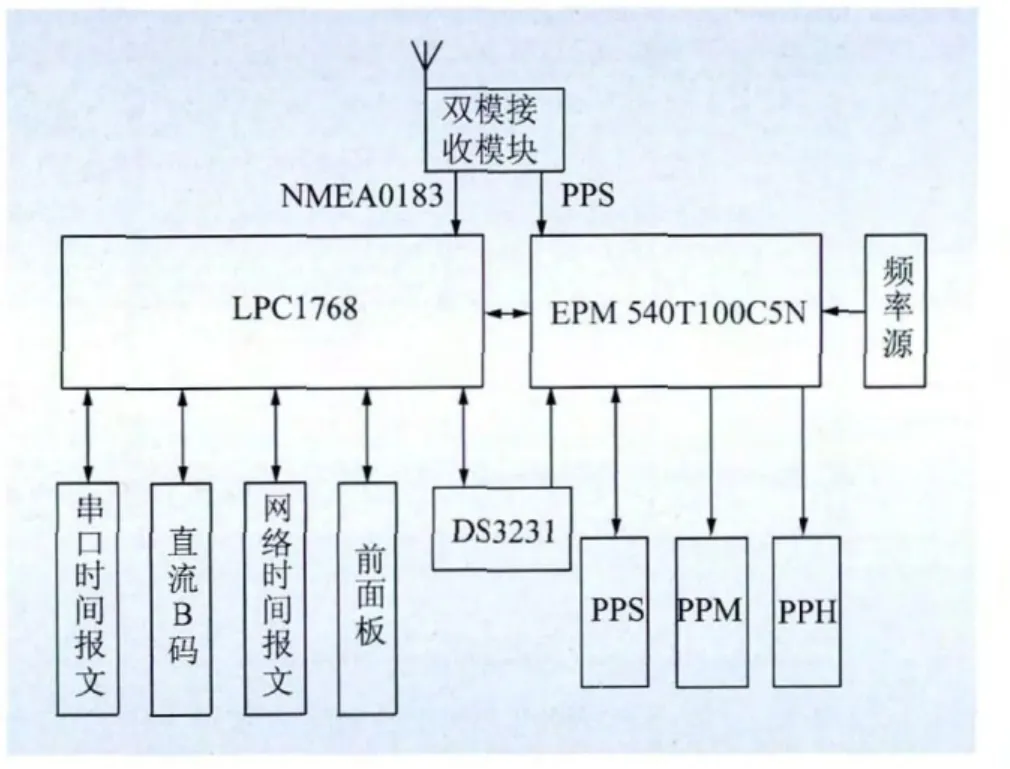
图3 硬件结构框图Fig.3 Hardware structure diagram
2.2 接收单元
接收单元的主要任务是接收并对各种时间源进行有效性和优先级的判断。以往的时钟设计大多基于单片机系统,受单片机处理速度和外设的限制,可收发时间源单一,无法接收NTP/PTP等时间源。
本文设计的时钟接收单元的主控芯片采用NXP公司基于 Cortex-M3架构的 ARM芯片 LPC1768。Cortex-M3内核是一种面向低成本、小管脚数目以及低功耗应用,主频高达100 M,内置嵌套中断控制的处理器内核,自带以太网功能模块。
时钟对每s的不同时间源主要接收和处理时刻都进行了详细设计,其关系如图4所示。

图4 每s的不同时间源主要接收和处理时刻Fig.4 Key receiving and processing time of different time sources per second
可以看出,当同时接入不同的时间源时,同一时刻往往有不同的数据需要收发和处理,同时需要保证不同时间信息的实时性要求。通过对Cortex-M3的嵌套中断控制器进行设置能够满足这些要求,其与内核紧密耦合,延时非常低,共8个中断优先级组域,并且可以对任何中断源进行优先级设置。以NXP公司提供的开发代码为例,将外部中断1设置为最高优先级的代码如下:
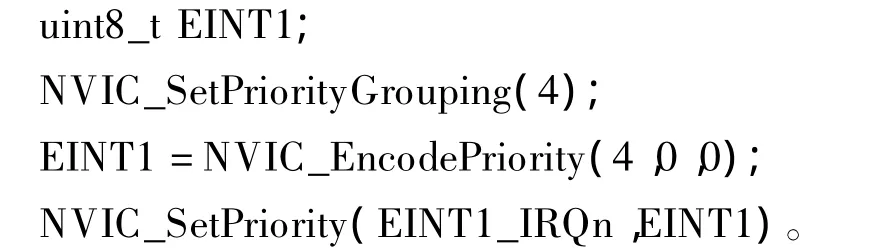
首先需要设置中断优先级组域,这里设为4,有8个抢占优先级,32个响应优先级。然后对优先级变量ENIT1进行编码,级数越高数值越低,最后将其赋给中断源外部中断1。这样在即使程序处理其他中断时,只要满足触发外部中断1的条件,程序将立即跳转到外部中断1的中断服务函数,而且无法被打断。
时间优先级的选择主要使用“位操作法”,例如同时接收到了串口报文和IRIG-B,代码如下:
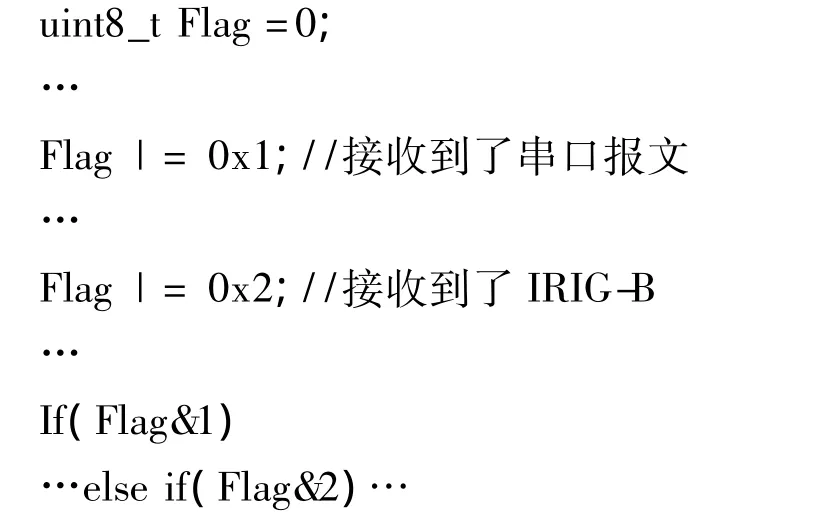
在接收到了串口报文后对标志位Flag第1位进行赋值,接收到了IRIG-B后对Flag第2位进行赋值,以此类推,依据不同的时间源进行不同位的赋值操作。在每s即将结束的时刻进行时间源优先级的判断并处理为下1 s所需发送的时间信息,实际运行结果表明,同时接收不同的时间源数据无丢失,时间源切换时无“断秒”的情况。
2.3 时钟单元
时钟单元的主要任务是将时钟引入跟踪锁定状态,并在接收单元失去了所有的外部时间源后进入守时保持状态。读取实时时钟芯片DS3231的时间信息,时钟保持一定的时间准确度,并输出时间同步信号和脉冲信号。
脉冲守时主要基于频率源的测频原理,硬件主要由CPLD芯片和频率源组成,CPLD芯片采用Altera公司的EPM570T100C5N,内部集成了570个逻辑单元,最大可测频率200 M。频率源又称频标,提供稳定的频率信号,作为时钟单元外部时间源失效的情况下守时脉冲信号源。根据守时精度要求的不同,可以选用原子频标、高精度恒温晶振或者普通的石英晶振。相应的,守时精度越高,付出的代价越大。
测频基本原理如图5所示。设实际闸门时间为t,有源晶振的频率为f,通过测量其方波周期数,可以换算出闸门开通的时间t=N/f。可以看出,这种方法产生的误差来自3个方面:(1)CPLD自身的延迟时间,EPM570的频率计数模块最大延迟时间为5.4 ns;(2)频率源的频率,理论上越大越好;(3)频率源本身的稳定度,这是误差产生的主要原因。本文根据实际需要,使用的普通有源晶振的稳定度在5×10-5左右,为了减少误差,利用DS3231产生的1 Hz的方波与双模模块的PPS信号进行对比,通过时间补偿算法保证了在失去外部时间源的情况下守时脉冲输出的准确度[9-10],可以保证ms等级下的守时精度。

图5 测频基本原理图Fig.5 Basic principle of frequence measurement
2.4 输出单元
输出单元输出各类时间同步信息、状态和告警信号,其中RS232采用DB9公头输出,RS485和IRIGB采用端子形式的差分输出,NTP/PTP采用RJ-45网口输出,脉冲采用端子形式的无源输出。
2.5 其他设计
输出信号之间应互相电气隔离,时间同步时钟的电源输入和所有输出不应与装置内部弱电回路有电气联系。
在无外部时钟源的情况下,时间同步时钟可通过4个按键,手动设置时间作为本地时钟源来使用。
3 双模时间同步时钟的整体性能验证
验证本文设计的双模时间同步时钟的整体性能,包括脉冲、IRIG-B和串口报文的输出精度、稳定性以及守时等性能。
双模卫星导航接收模块输出的PPS和时钟输出PPS波形如图6所示,两者偏差小于30 ns。
IRIG-B的第1个码元准时沿发送波形如图7所示,精确度优于 1 μs。
IRIG-B的发送波形如图8所示,可以看到每个码元的长度为10 ms,所表示时间为45 s。
串口报文发送的波形如图9所示,起始位与PPS的上升沿偏差优于5 ms,总共发送时间为20 ms左右。
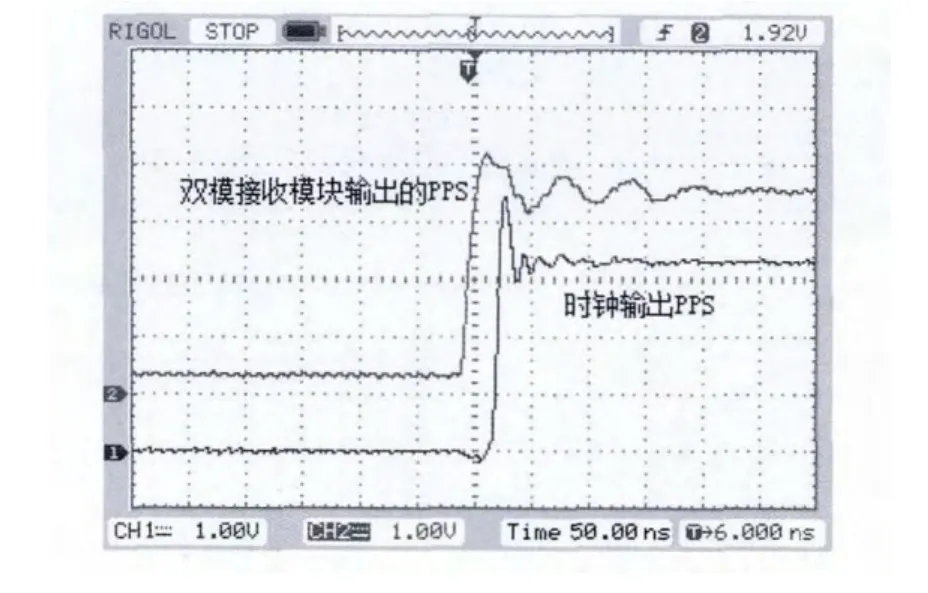
图6 输入PPS和输出PPS波形Fig.6 The waveform of input and output PPS
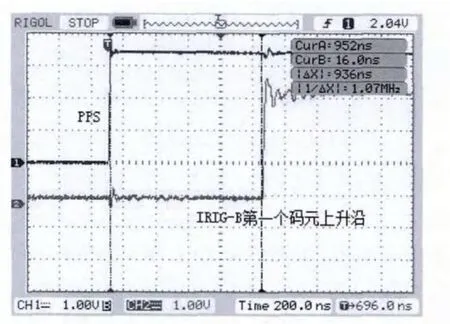
图7 IRIG-B准时沿发送波形Fig.7 The waveform of the first IRIG-B code transmit
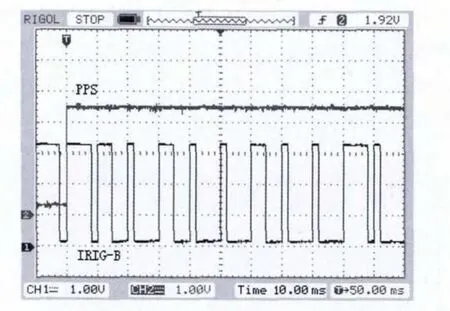
图8 IRIG-B发送波形Fig.8 The waveform of IRIG-B code transmit

图9 串口报文发送波形Fig.9 The waveform of RS232/485 transmit
失去外部时间源1 min后,双模卫星导航接收模块输出的PPS和时钟输出PPS波形如图10所示,二者偏差大约为1 μs。
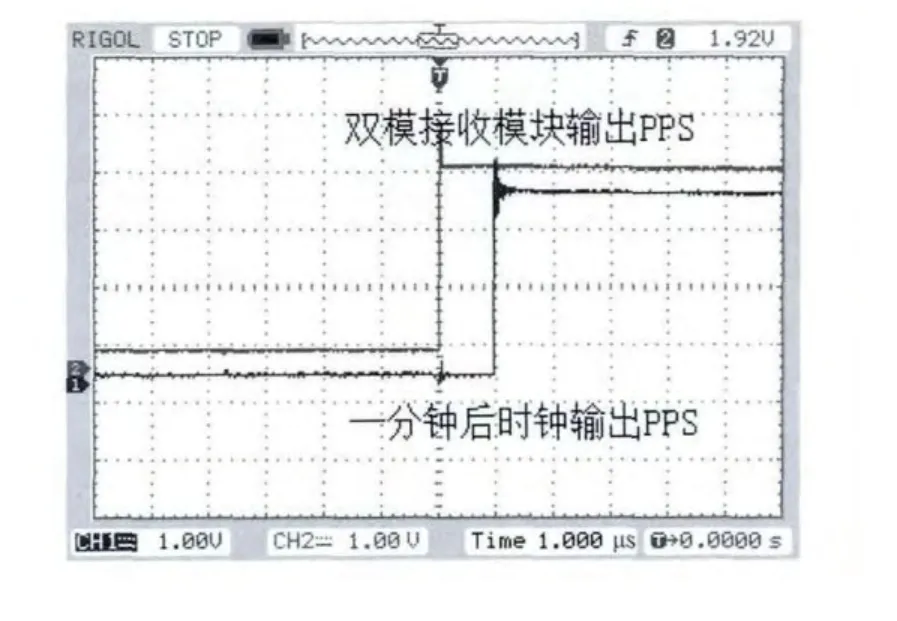
图10 1 min守时精确度Fig.10 The accuracy of 1 minute time-keep
4 结语
本文基于北斗II代/GPS双模卫星导航接收模块,利用ARM丰富的外围设备和CPLD输出延时小的特点,根据电力系统时间同步系统技术规范,研制了一种电力系统双模时间同步时钟,可以适应电力系统时间同步系统基本式、主从式以及主备式[11]3种组网方式,并且实现了多种时间源的互为备用和战时备用。其体积小、功耗小、工作稳定,具有一定的实际使用价值。
[1]于跃海,张道农,胡永辉,等.电力系统时间同步方案[J].电力系统自动化,2008,32(7):82-86.
[2]余贻鑫,栾文鹏.智能电网述评[J].中国电机工程学报,2009,29(34):1-8.
[3]郜洪亮,刘遵义.基于GPS和FPGA的便携式高精度同步时钟的研制[J].电力系统保护与控制,2009,37(2):81-87.
[4]张鹏,王少荣,程时杰.电网状态监测系统GPS同步时钟的稳定性研究[J].继电器,2004,32(23):19-20.
[5]DL/T 1100.1—2009电力系统的时间同步系统第1部分:技术规范[S].
[6]张信权,梁德胜,赵希才.时间同步技术及其在变电站中的应用[J].继电器,2008,36(9):69-71.
[7]庄玉飞,黄琦,井实.基于GPS和IEEE-1588协议的时钟同步装置的研制[J].电力系统保护与控制,2011,39(13):111-115.
[8]许保落,张道农,袁文广,等.基于多时钟源的时间同步系统设计与应用[J].电力科学与技术学报,2011,26(3):25-29.
[9]陈孟元,陈跃东.基于高精度晶振同步北斗1 pps的同步相量测量装置时钟源[J].电力自动化设备,2011,31(9):111-114.
[10]王康.基于以太网的网络化时间统一系统的研究及实现[D].西安:中国科学院研究生院,2010.
[11]雷霆,李斌,黄太贵.220 kV变电站GPS时间同步系统实现技术[J].电力自动化设备,2007,27(11):71-74.