一种感应电机软起动器容错控制系统的设计*
2014-08-08杨克立
程 辉, 杨克立
(1. 河南工程学院 电气信息工程学院,河南 郑州 451192;2. 中原工学院 工业训练中心,河南 郑州 450007)
0 引 言
三相感应电机以其显著的特点广泛应用于工业、制造业及一些推进牵引行业,如鼓风机、压缩机、离心泵、电梯、装配线、运输和传送带系统以及供暖、通风、空调系统等。在其起动过程中,经常采用软起动器进行起动[1-3]。通过控制三相反并联晶闸管(Sillicon Controlled Rectifier, SCR)的导通角,不但能在整个起动过程中低成本有效地降低起动电流和减小输出转矩脉动,实现无冲击平滑起动电机,而且可根据电动机负载的特性来调节起动过程中的各种参数,如限流值、起动时间等。但若晶闸管发生故障,系统就会失去软起动的功能。因此,研发并应用容错控制技术以提高系统的可靠性,使其在发生故障的情况下,仍能保持平滑起动,降低费用并减少停机时间,不至于造成启动失败甚至发生致命的后果,将具有重要的意义。本文在研究了目前应用软起动器典型结构的基础上,提出了一种具有容错功能的感应电机软起动器控制系统的设计方法。当任何一相任意一个功率开关器件发生短路或断路故障时,运用新型拓扑结构并采用闭环控制使得在两相可控的条件下仍可实现软起动功能。
1 容错控制策略
1.1 改进的拓扑结构
典型的三相交流感应电机软起动拓扑结构如图1所示[4]。三相反向并联SCR分别与三相定子绕组相连,电阻与电容的串联组成缓冲电路也分别并联于每相反向并联SCR以防止开关瞬变过程造成换相失败;同步旁路开关也分别并联于每相反向并联SCR,当电机起动完成的瞬间短路三相反向并联SCR,以减少其承受的热应力及功率损耗;电压、电流检测模块实现同步过零触发、控制导通角和同步旁路开关。

图1 传统的软起动拓扑
针对软起动器系统的故障,目前所研究的有两种类型[5],分别是单相反向并联SCR短路和断路。SCR短路,这导致供给电机的电压不平衡,很高的起动电流也会致使转矩脉动很大;而SCR断路时则没有输出转矩,电机起动失败。
本文所提出的拓扑结构如图2所示。其改进的用于容错控制的结构有两点: 一是传统的同步旁路开关改为三个独立的分控开关,以便当断路故障时,故障相的反向并联SCR将被短路并进入容错控制状态,而不至于停机造成起动失败;二是在电机三相定子绕组端增加电压检测模块,所检测到的电机终端信号作为闭环控制的反馈信号用于实现本文所提出的容错控制算法。与传统的三相交流感应电机软起动拓扑结构相比,改进的结构并没有增加太多的硬件设备及附加成本,与采用增加冗余设备以保持故障时不停机的容错控制策略相比,显然其更加适合。并且改进的拓扑结构对于单相SCR无驱动信号或者驱动电路故障也具有容错控制能力。
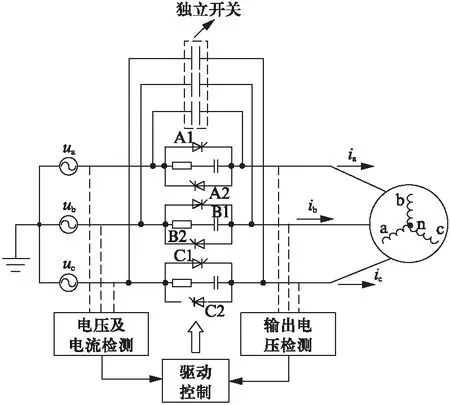
图2 提出的软起动拓扑
1.2 闭环的两相控制策略
当故障发生后,故障相不可控,其余两相可控,本文所设计的改进的拓扑结构仍然会导致供给电机三相电压不平衡,很容易证明这也会导致三相电流中有负序电流分量,进而引起起动转矩波动。因此本文所设计的控制策略为在可控两相中采用独立控制,以产生接近于正常时平衡的三相电流,尽可能的减小转矩波动。不同的电机其输出功率不同且负载也不一样,采用开环控制以产生合适的触发角度是很难实现的,故采取闭环的两相控制策略。
为方便说明本文以下的研究均以c相为例,先假设c相短路。采用电压电流双闭环控制,如图3所示。其中电压环用来控制其起动的快速性。输入信号为软起动时给定电压信号(为斜坡信号),和电压传感器检测到正常工作的另外两相电机绕组的电压进行比较,采用PI调节器,输出则为软起动发生过程中由电压引起的触发角的变化量;单独采用电压环控制,则故障发生后起动时电机仍然承受不平衡三相交流电,为了得到较小的起动转矩脉动,在电压环的基础上采用了电流环控制。输入参考信号为检测到三相绕组电流和的平均值为
(1)


图3 容错控制软起动的两相闭环控制策略
由此可得,软起动时a、b相晶闸管的触发角为
αa=αa0-αaU-αaI
αb=αb0-αbU-αbI
(2)
式中:αa0、αb0——假设故障没有发生时的两相初始触发角;
αaU、αbU——电压环反馈输出;
αaI、αbI——电流环反馈输出。
2 容错控制设计
根据图3可以画出容错控制方框图,如图4所示。图中,u=f(α)用来表征起动过程中α触发角和输出电压的非线性。由于电压环和电流环相互独立,可采取单独控制策略,如图5和图6所示。

图4 容错控制框图

图5 电压环控制
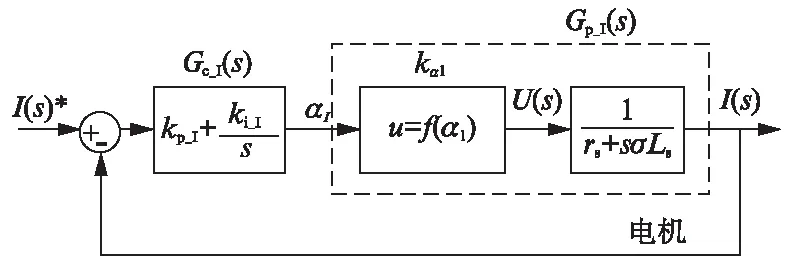
图6 电流环控制
图中,Gc_U(s)和Gc_I(s)分别表示电压环和电流环PI调节器的传递函数为
2.1 软起动器的线性化处理
一个周期内,以a相为例,感应电机相电压可以表示为[6]:
(4)
式中:φ——功率因数角;
ea、eb、ec——三相绕组产生的感应反电动势。
软起动过程中近似认为ea=eb=ec≈0。
uug、uvg、urg分别为三相交流电源电压。其中:
uug(t)=Umcos(ωt)
(5)

把式(4)和式(5)代入(6),有:
(7)
即式(7)表征了电压环和电流环的αU和αI的计算方法。
由式(7)可知,若αU和αI已定,则可以唯一确定U和二者的关系。亦即可以线性化处理得到:
(8)
2.2 系统的闭环传递函数
从图7可以得到电压环的开环和闭环传递函数,分别为
(9)
从图8可以得到电流环的开环和闭环传递函数,分别为

(10)
2.3 PI调节器的设计
采用对数频率特性(伯德图)分别进行电压环和电流环的参数设计。即根据各个环要求的动态性能或稳定裕度,确定希望的预期对数频率特性,再和被控对象进行比较,确定调节器的结构及参数[7]。
2.3.1 电压环的设计
设计的原则如下:
(1) 穿越频率fc=400Hz;
(2) 相位裕量φ=120°
由此可以得出:
(11)
2.3.2 电流环的设计
设计的原则如下:
(1) 穿越频率fc=400Hz;
(2) 相位裕量φ=90°
由此可以得出
(12)

3 仿真结果
为了验证文章所提出的控制策略和容错控制系统设计的可行性,利用MATLAB/Simulink进行了仿真。电机模型参数: 额定电压380V,极对数为2,额定电流为3A,额定转速1450r/min,额定功率1.2kW,Rs=3.85Ω,Rr=2.57Ω,Lls=17.56mH,Llr=17.56mH,Lm=0.3727H。按照电压环和电流环设计原则,画出各自应的伯德图,得出kp_U≈0.0013,ki_U=7.27,kp_I=0.3,ki_I=32.3。
电机电流波形如图7所示。



图7 电机电流仿真结果
其中,图7(a)对应三相开环控制,图7(b)为发生故障后的两相控制输出波形,由图可以看出故障后起动电流不平衡,图7(c)为容错控制下的输出电流波形,和图7(b)相比,在故障发生后,起动电流仍能趋于平衡,可以获得较好的起动性能。
图8为电机输出转矩波形。
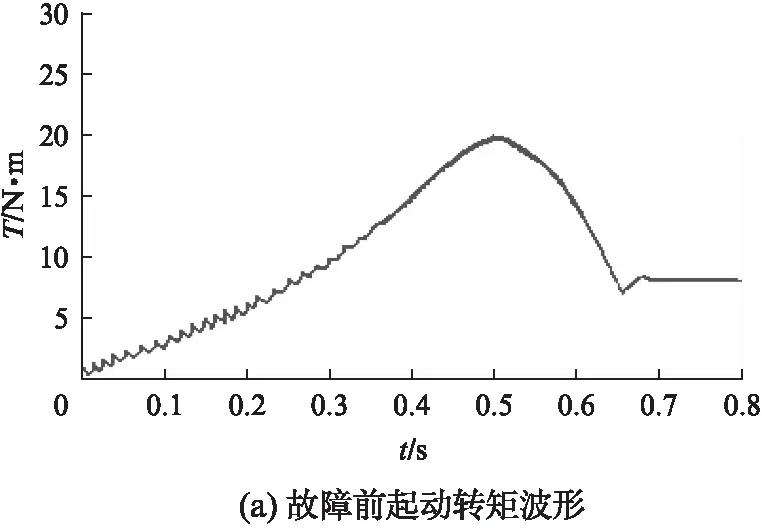

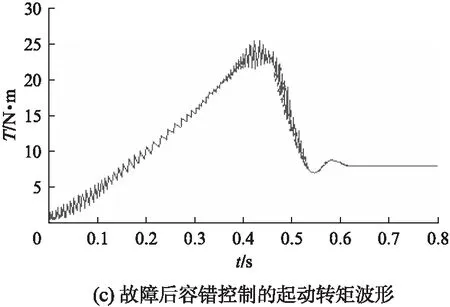
图8 电机启动转矩仿真结果
其中图8(a)对应三相开环控制,起动平稳;图8(b)为发生故障后的两相控制输出波形,可以看出故障后起动转矩波动很大,起动不平稳,图8(c)为容错控制下的输出电流波形,和图8(b)相比,在故障发生后,起动转矩波动较小,起动较平稳。
4 结 语
本文研究了在感应电机软起动器发生故障后一种新颖的容错控制策略,该方法在传统的软起动器控制系统的基础上进行了硬件电路改造。详细介绍了控制器的设计,并进行了仿真验证。结果表明,故障发生后新的控制方式仍然可以获得良好的输出性能,达到软起动的目的。
【参考文献】
[1] 刘红樱.异步电动机软起动器设计[J].机电工程,2007,24(3): 74-76.
[2] 童玲,王志新,张华强,等.异步电动机软启动技术及转矩控制仿真研究[J].电气传动,2010,40(4): 43-46.
[3] 刘芳霞.三相异步电动机软起动器的设计[J].机械工程与自动化,2011(2): 144-148.
[4] 闫鹏,易媛媛.三相异步电动机设计[J].舰船电子工程,2013(3): 139-141.
[5] ZENGINOBUZ G, CADIRCI I, ERMIS M. Soft starting of large induction motors at constant current with minimized starting torque pulsations[J]. IEEE Trans Ind,2001,37(5): 1334-1347.
[6] MCELVEEN R F, TONEY M K.Starting high-inertia loads[J]. IEEE Trans Ind,2001(37): 137-144.
[7] 阮毅,陈伯时.电力拖动自动控制系统-运动控制系统[M].北京: 机械工业出版社,2009.
