神经网络在无刷直流电机控制系统中的应用
2014-08-08程声烽程小华
程声烽, 程小华
(华南理工大学 电力学院,广东 广州 510640)
0 引 言
无刷直流电机(Brushless Direct Current Motor, BLDCM)以其体积小、效率高、维护方便、励磁损耗无及调速性能好等优点被广泛应用于伺服系统、数控机床、医疗机械、航天航空及军事工业等领域[1-3]。神经网络是由众多简单的神经元连接而成,通过模拟人脑细胞的分布式工作特点和自组织功能实现并行处理、自学习和非线性映射等功能。由于能逼近任意非线性函数,可自学习以适应环境变化等特点,神经网络已广泛应用于BLDCM控制系统,并取得了较多的研究成果。本文在参考国内外相关文献的基础上,对神经网络在BLDCM控制系统中的应用进行归纳总结。
1 神经网络在BLDCM控制系统中的应用现状
神经网络在BLDCM控制系统中的应用可分为4类: (1) 神经网络充当辨识器,充当BLDCM的动态数学模型;(2) 神经网络本身充当控制器,如内模控制器、预测控制器、模型参考自适应控制器等;(3) 神经网络在BLDCM控制系统中起优化计算的作用;(4) 神经网络控制与其他智能控制、优化算法相结合,为BLDCM提供非参数化对象模型、推理模型及优化参数等,如模糊神经控制、PID神经网络控制等。
1.1 BLDCM神经网络辨识器
在建立BLDCM模型时所作的若干假设往往不能忽略,如气隙磁密是非线性分布的,并非理想的正弦或梯形分布,且电机可能受到参数漂移、老化和噪声干扰等因素影响;若仍按假定数学模型构造控制系统,可能造成系统控制精度不高。神经网络辨识器具有强大的非线性映射能力,能较好地解决该问题。应用于BLDCM中的神经网络辨识系统的一般结构如图1所示。其基本原理以BLDCM的实际输出与神经网络辨识器输出之间的差值为目标,通过辨识算法调整辨识网络权值,使神经网络辨识器无限趋近BLDCM的实际模型。针对气隙磁密的非线性分布,文献[4]从BLDCM电路方程中分离出气隙磁密这一非线性量,用人工神经网络非线性逼近的特性,对气隙磁密波形进行逼近,从而建立较为精确的BLDCM模型。为建立更精确的BLDCM数学模型,文献[5]提出采用基于熵类误差准则学习算法的BP神经网络来实现控制系统中BLDCM参数的实时辨识,逼近BLDCM的实际模型,有效提高了系统的控制精度。
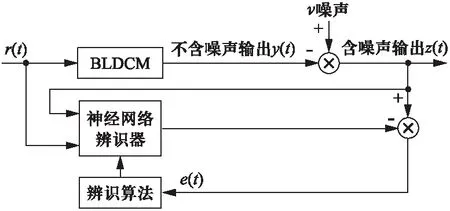
图1 BLDCM神经网络辨识系统的一般结构
1.2 BLDCM神经网络控制器
目前,应用于BLDCM中的神经网络控制器大致有模型参考自适应控制器、自校正控制器、内模控制器、预测控制器等。
1.2.1 模型参考自适应控制器
模型参考自适应神经控制系统由参考模型、神经网络辨识器、自适应神经网络控制器和BLDCM等组成,其原理框图如图2所示。通过神经网络辨识器获得BLDCM的数学模型,在离线训练神经网络控制器的基础上,实现BLDCM的输出逼近期望输出。针对BLDCM传统PID控制方法的不足,文献[6]提出一种基于径向基函数神经网络在线辨识的单神经元PID模型参考自适应控制方法。该方法通过构造一个径向基函数神经网络对系统进行在线辨识,建立其在线参考模型,同时由单神经元PID控制器完成控制器参数的自学习,并在数字信号处理器中实现控制参数的在线调节。仿真和试验结果表明,该控制系统较好地实现了给定速度参考模型的自适应跟踪,能适应环境变化,具有较强的鲁棒性,并已在实际控制中得到应用。

图2 模型参考自适应控制系统
1.2.2 自校正控制器
自校正控制器框图如图3所示,其在结构上存在两个反馈回路,通过神经网络估计器对BLDCM的参数在线估计及控制器对系统参数的自动整定,实现自适应控制。目前,基于梯度下降法的BP自校正神经网络已在BLDCM控制系统中取得了应用[7],其通过在线学习来适应系统工作环境和系统本身参数的变化,以达到良好的控制效果。另外,针对梯度下降法的不足,一些改进的方法,如改进的梯度下降法、Levenberg-Marquardt法等也在自校正网络中取得了应用。

图3 自校正控制器
1.2.3 神经网络内模控制器
神经网络内模控制器如图4所示。该控制系统将神经网络内部模型与BLDCM相并联,并将内模神经控制器串联,且以BLDCM与神经网络内部模型输出之差作为负反馈信号,反馈到网络输入端,系统稳定的条件是控制器和BLDCM都要稳定。文献[8]设计了神经网络内模自适应速度控制器,利用神经网络逼近系统的速度控制器和标称模型,离线仿真和试验结果表明,设计的神经网络内模自适应控制系统有很强的自适应能力,当模型参数发生变化时,系统具有很强的鲁棒性,可获得很好的动、静态特性。

图4 神经网络内模控制器
1.2.4 神经网络预测控制器
神经网络预测控制器的结构如图5所示。神经网络预测控制利用作为对象辨识模型的神经网络产生预测信号,然后采用优化技术求出控制向量,从而实现对非线性系统的预测控制。得到最优控制轨线后还可再训练另一个控制器的神经网络,使其逼近此控制函数,训练结束后,由此控制器直接对BLDCM进行控制。引入滤波器的目的是获得期望的鲁棒性和跟踪响应。例如可用神经网络来实现PWM发生器BLDCM的转速跟踪,从而在BLDCM的PWM预测模型基础上,进行BLDCM的神经网络预测控制[9]。
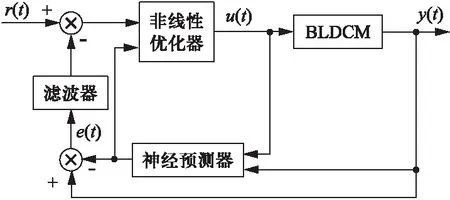
图5 神经网络预测控制器
1.3 神经网络优化计算在BLDCM控制系统中的应用
在BLDCM神经网络控制系统中,神经网络优化计算的主要目的是在优化神经网络结构、权值和算法的基础上,使BLDCM的转速和转矩波形更理想,转子位置估计和故障诊断更精确。转速控制主要通过神经网络控制器的调节达到最优。本文着重论述神经网络优化计算在BLDCM转矩脉动抑制、转子位置估计和故障诊断上的应用。
1.3.1 转矩脉动抑制
BLDCM由于存在电磁转矩脉动的缺陷,降低了其在伺服系统中的应用精度,使其应用受到限制。采用神经网络的BLDCM换相转矩脉动抑制的一般方法: 在保持换相过程中相电流下降和上升速率近似相等的条件下,保持回路中总的电流幅值不变,实现换相转矩波动的抑制。该方法的优点是无需预知系统的精确参数,且对环境变化有自适应调节的功能。文献[10]和[11]采用该方法取得了较好的转矩抑制效果,并在实际中取得较大应用。
1.3.2 转子位置估计
为实现同步运行,BLDCM必须正确获取转子位置信号并以此信号控制逆变器实现换向。目前,神经网络实现BLDCM无位置传感器转子位置估计的方法有两种。
(1) 通过对电机端电压和相电路的映射,准确估计出电机换向信号,无需预知电机的精确参数,能使电机具有较宽的调速范围。文献[12]将径向基函数(Radial Basis Function, RBF)神经网络应用于无刷直流电机无位置传感器控制,采用动态的RBF神经网络来估计转子换相位置,采用k-均值聚类法得到RBF网络的初始中心,利用梯度下降纠正误差法更新网络参数,使网络具有快速在线调节能力。文献[13]在文献[12]的基础上对RBF神经网络在结构上、动态响应性能上作出进一步改进和完善,按照自适应算法构造了一个结构简单、紧凑的RBF网络来实现电压、电流与功率开关导通信号之间的非线性映射,实现了BLDCM的直接电流控制。
(2) 在外部硬件电路获得的有效反电动势信息的基础上,利用神经网络的非线性任意逼近特性,进行正确的相位补偿,实现无位置BLDCM的控制。文献[14]根据BLDCM的电压模型由测量出的电机相电压和相电流得到实际电动势,然后和根据电流模型得出的估计电动势进行比较,由偏差来修正神经网络的权值,进而产生新的位置角。文献[15]在获取的有效反电动势的基础上,采用神经网络的方法实现对BLDCM的换相补偿控制。文献[16]将小波网络应用于BLDCM无位置传感器控制,采用梯度下降法进行网络参数的训练,由离线训练初步确定隐层节点小波函数的尺度因子、平移因子及网络输出层连接权值,然后以滤波和逻辑处理后的网络输出信号为教师对网络输出层连接权值进行在线调整,网络通过对电机端电压的电流映射,得到准确的换相信号。
1.3.3 故障诊断
神经网络具有强大的非线性映射能力、并行处理能力、良好的学习能力、独特的联想记忆能力等优点,十分适用于复杂电机系统的故障诊断。用人工神经网络技术处理故障诊断问题,不仅能进行复杂故障诊断模式的识别,还能进行故障严重性评估和故障预测。由于人工神经网络能自动获取诊断知识,使诊断系统具有自适应能力。近年来,基于神经网络的BLDCM故障诊断方法已成为较通用的故障诊断解决方案[17]。
文献[18]基于改进的BP神经网络算法,设计并分析了一套针对BLDCM的状态观测器故障诊断方法。用神经网络取代分析冗余技术,由电机控制系统的输入- 输出信号进行训练,通过比较实际输出和神经网络观测器的输出残差来检测和区分故障。仿真结果表明,该方法能快速确定故障的时间、位置。文献[19]在文献[18]的基础上使用一种基于遗传算法学习的小波神经网络,解决了冗余技术中至关重要的故障诊断问题。
文献[20]提出将模糊神经网络用于BLDCM故障诊断,给出了模糊神经网络的结构和学习算法,并提出了一种阈值向量故障诊断方法,在实际应用中验证了该方法的有效性。
1.4 神经网络控制与其他智能控制相结合在BLDCM控制系统中的应用
现阶段,神经网络控制与其他智能控制相结合,相互弥补,充分发挥各自优点,已形成了各具特色的复合控制系统,可分为两大类。
(1) 其他智能控制优化神经网络。如针对神经网络初始权值选择较难、学习算法收敛速度慢等缺点,将具有全局搜索能力强的粒子群算法、遗传算法、蚁群算法等智能算法与神经网络结合,使系统控制效果更好。如针对神经网络的初始权值对控制效果的不利影响,文献[21]提出一种基于遗传算法优化的BP神经网络PID控制算法,将其应用于BLDCM转速控制系统中取得了较好效果。为进一步提高控制精度,文献[22]针对BLDCM传统参数固定的速度控制器在电机参数发生改变时,预先设定的控制器参数很难适应新的运行情况,提出将BP神经网络与矢量控制器相结合,并用遗传算法来优化神经网络的初始连接权值,实际表明该系统具有良好的应用性。另外,将神经网络与模糊控制相结合[23]、用粒子群算法来优化PID控制器的参数[24]等复合控制也已在BLDCM控制系统中广泛应用。
(2) 神经网络优化其他智能控制。如针对传统PID参数易受环境条件影响[25]、单纯滑模变结构易出现“抖动”[26]、模糊控制规则的模糊不确定性[27]等现象,应用神经网络的非线性映射能力,可有效优化其参数变化,达到理想的控制效果。
2 讨论与展望
神经网络具有强大的非线性信息处理能力,故其在BLDCM控制系统中的应用取得了巨大成功,具体表现在: 作为辨识器能够较好地逼近BLDCM的数学模型;作为控制器,实现BLDCM高精度控制;与其他智能控制相结合优化了控制效果。
神经网络存在的问题,如神经网络稳定性及收敛性、初始权值的设置、算法收敛速度、网络模型结构的选择等,仍是影响其在BLDCM高精度控制中应用的因素。将神经网络应用于BLDCM控制系统中应解决的问题如下。
(1) 对于BLDCM这一非线性系统,仅仅依靠一种理论、一种方法无法实现在复杂环境下准确、及时地进行电机控制。可考虑采用多重神经网络模型结构,以减少单一模型控制精度低、网络训练时间较长等问题。
(2) 提高网络训练速度方面的研究,可考虑从求解算法(如增广卡尔曼滤波算法、局部化算法、递推算法等)、网络结构简化的角度入手。
(3) 训练样本的选取及不同来源样本的综合运用,对电机模型的依赖及噪声引起的偏差。
(4) 新的网络模型(自组织神经网络、混沌神经网络等)的理论研究与应用。
(5) 将多种智能控制相结合组成复合智能控制器,如模糊小脑神经网络PID控制。
另外,神经网络在BLDCM控制系统中的应用多数处于理论仿真试验研究阶段,实际控制系统中的应用还较少。如何针对控制系统的特点选择适用于控制系统分析和设计的神经网络或其变形结构是今后需要进一步研究的内容。
3 结 语
本文详细论述了神经网络在BLDCM控制系统中的应用现状,为高精度BLDCM神经网络控制系统的设计提供了思路。神经网络是一种非常有效的智能控制方法,新的神经网络模型及智能复合控制系统将成为未来的发展趋势。
【参考文献】
[1] 叶金虎.现代无刷直流永磁电动机的原理和设计[M].北京: 科学出版社,2007.
[2] CHEN Z Q, MUTUWO T, DOKI S J, et al. New adaptive sliding observer for position and velocity-sensorless controls of brushless DC motor[J]. IEEE Trans on Industrial Electronics, 2000,47(3): 582-591.
[3] WU H X, CHENG S K, CUI S M. A controller of brushless DC motor for electric vehicle[J]. IEEE Transactions on Magnetics, 2005,41(1): 509-513.
[4] 黄平林.一种基于神经网络的无刷直流电机模型及仿真[J].电机技术,2004,1(3): 8-11.
[5] 亓涛,姚晓东.BP网络在无刷直流电机参数辨识与控制中的应用[J].微电机,2005,38(6): 58-60.
[6] 夏长亮,李志强,王明超,等.基于RBF神经网络在线辨识的永磁无刷直流电机单神经元PID模型参考自适应控制[J].电工技术学报,2005,20(11): 65-69.
[7] 郭绪猛,刘景林,徐建德.无刷直流电机神经网络自校正控制研究[J].测控技术,2008(3): 55-57.
[8] 沈艳霞,王友利,纪志成.无刷直流电机神经网络内模自适应控制器设计[J].电力电子技术,2005,39(3): 40- 42.
[9] 王群京,姜卫东,赵涛,等.基于神经网络的无刷直流电机预测控制的仿真研究[J].系统仿真学报,2005,17(6): 1490-1493.
[10] KIM D K, LEE K W, KWON B I. Commutation torque ripple reduction in a position sensorless brush-less DC motor drive[J]. IEEE Transactions on Power Electronics, 2006,21(6): 1762-1768.
[11] LAI Y S, LIN Y K. A unified approach to back-EMF detection for brushless DC motor drives without current and hall sensors[J]. IEEE Transactions on Power Electronics, 2003,18(6): 1293-1298.
[12] 夏长亮,文德,范娟,等.基于RBF神经网络的无刷直流电机无位置传感器控制[J].电工技术学报,2002,17(3): 26-29.
[13] 夏长亮,王娟,史婷娜,等.基于自适应径向基函数神经网络的无刷直流电机直接电流控制[J].中国电机工程学报,2003,23(6): 123-127.
[14] 刘慧博,张继鹏.基于神经网络的无刷直流电机转子位置估计[J].微电机,2003,36(3): 30-32.
[15] 毛怿弘,邹俊忠,姚晓东,等.基于神经元网络的电机换相控制[J].东南大学学报,2003,33(9): 134-136.
[16] 史婷娜,田洋,夏长亮,等.基于小波网络的永磁无刷直流电机无位置传感器控制[J].天津大学学报,2007,40(2): 190-194.
[17] 黎文锋,邓继忠,沈雷.神经网络在电机故障诊断中的应用综述[J].电气应用,2006,25(3): 45- 47.
[18] 李争,刘朝英,宋雪玲,等.基于神经网络的无刷直流电机故障诊断和容错控制方法的研究[J].河北工业科技,2009,26(5): 411- 414.
[19] 史婷娜,田洋,夏长亮,等.基于小波网络的永磁无刷直流电机无位置传感器控制[J].天津大学学报,2007,40(2): 190-194.
[20] 刘胜利,曾鸣,苏宝库.基于模糊神经网络的故障诊断及其在无刷直流电机系统中的应用[J].中国惯性技术学报,1999,7(2): 30-34.
[21] CHEN H C, LIAW C M. Current mode control for sensorless BDCM drive with intelligent commutation tuning[J]. IEEE Transactions on Power Electronics,2002,5(17): 747-756.
[22] 王家达,刘祖望.基于遗传神经网络的无刷直流电机矢量控制系统设计[J].仪器仪表学报,2007,28(8): 201-203.
[23] 杨巧玲,郝晓弘,张海平.基于神经网络自抗扰控制的无刷直流电机控制器研究[J].科学技术与工程,2008,8(24): 6478-6481.
[24] 付丽辉.基于改进型BP神经网络的无刷直流电机调速系统的应用研究[J].大庆师范学院学报,2010,30(6): 29-32.
[25] 杜军,万健如,许镇琳.神经网络模糊控制在无刷直流电机中的研究与实现[J].组合机床与自动化加工技术,2005(12): 70-72.
[26] 安树.基于RBF网络的滑模变结构控制在无刷直流电机伺服系统中的应用[J].军械工程学院学报,2010,22(2): 61-64.
[27] 夏长亮,刘丹,王迎发.无刷直流电机免疫反馈自适应学习人工神经网络控制[J].天津大学学报,2007,40(10): 1235-1240.
